光学导航引导的手术机器人系统设计
2017-11-28张维军徐进张勇刘亚军
张维军,徐进,张勇,刘亚军
1.北京天智航医疗科技股份有限公司 技术部,北京 100192;2.解放军第三〇九医院 医学工程科,北京 100091
光学导航引导的手术机器人系统设计
张维军1,徐进1,张勇1,刘亚军2
1.北京天智航医疗科技股份有限公司 技术部,北京 100192;2.解放军第三〇九医院 医学工程科,北京 100091
目的设计一种将机器人技术和光学导航手术技术有机结合的光学导航引导的手术机器人系统,解决目前骨科手术中存在的问题。方法通过原理分析、系统设计和制造,设计光学导航引导的手术机器人系统,还设计了精度试验工装,进行精度试验对系统精度性能进行验证,进行临床试验验证系统的临床安全性和有效性。结果光学导航引导的手术机器人系统定位误差小于1.0 mm,临床试验验证机器人辅助脊柱椎弓根钉手术的导针置入偏差明显小于常规的徒手方法。结论光学导航引导的手术机器人系统具备“手-眼”协同能力,实现骨科手术中手术路径的精确定位。
手术机器人;光学导航;微创手术;精度试验
引言
微创手术追求最小的切口,患者痛苦小、出血少、术后恢复快,是外科手术技术发展的方向。但由于人手生理的局限,包括稳定性不足、定位准确性欠缺等问题,实际临床手术中很难达到真正的微创目标。微创手术技术在临床应用推广中面临各种困难,例如螺钉松动或断裂、神经和血管损伤等。机器人、计算机、先进传感器等技术的发展,为解决临床困难提供了可行的解决方案。如何利用各种先进的技术手段为临床服务,成为国内外研究的热点。在这种背景下,计算机辅助手术、逐渐发展成熟,包括手术机器人和光学导航手术系统。机器人技术应用于临床手术始于1987年美国KWOH利用PUMA200机器人完成了脑部活检手术。虽然由于机器人安全性方面的问题该项目最终没有成功,但机器人在外科手术中定位准确性方面的巨大优势特点受到了极大的关注,引发了手术机器人研发的热潮。时至今日,机器人已经在神经外科、脊柱、关节、创伤等手术中得到应用[1-8],但是机器人在临床应用中的问题,包括临床适应证单一、患者术中的移动引起的定位偏差、人机交互、安全控制等,也逐渐暴露出来。光学导航手术系统是计算机辅助手术发展中的另一项重要的技术,该技术主要是利用光学跟踪装置实时跟踪手术工具和患者,并将二者的关系融合并映射到手术图像上,从而为医生提供手术引导信息。光学导航系统没有主动定位,手术容易受到医生操作的影响[9],因此应用范围也受到限制。机器人和光学导航手术系统在辅助手术方面具有各自的优势,同时存在不足,将二者有机结合开发一种光学导航引导的手术机器人系统,对充分发挥计算机辅助手术系统的特点,提高手术效率,降低手术风险都具有重要的意义。
1 系统原理
光电导航引导的手术机器人系统的主要作用是利用机器人定位精确、工作稳定、操作灵活的特点,辅助医生精准完成手术操作。其工作过程主要包括:① 手术规划,医生利用配套的手术规划软件,在手术规划图像上设计手术路径,选择合适植入物;② 空间定位,即获得手术路径的空间坐标;③ 路径导航,即根据手术路径的空间坐标控制机器人运动,将手术工具运动至手术路径。可以通过基于二维透视图像或者三维重建图像的空间定位算法实现空间定位[10]。路径导航的问题是如何根据手术路径的空间坐标计算机器人运动控制参数,从而控制机器人定位手术路径。
2 系统设计
2.1 系统组成
光学导航引导的手术机器人系统包括机器人、光学定位装置、机器人跟踪支架、患者跟踪支架、图像标定器、导向套筒、手术规划和控制软件系统等。光学定位引导的手术机器人系统,见图1。
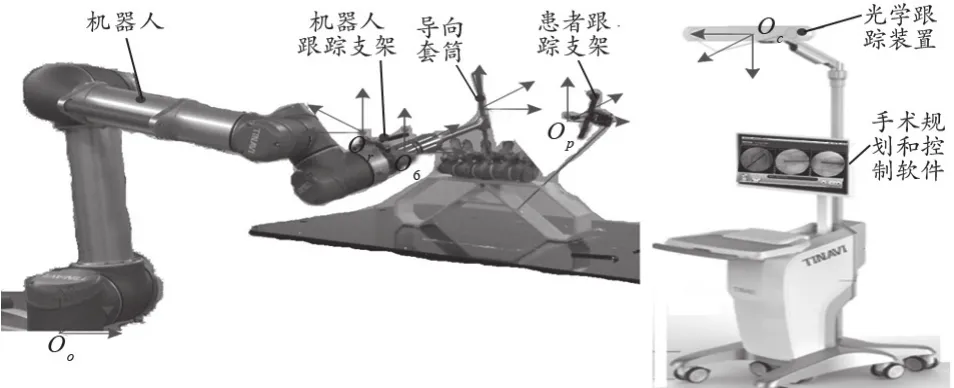
图1 光学定位引导的手术机器人系统
光学定位装置采用NDI公司Polaris系统,定位误差小于0.3 mm。机器人跟踪支架和患者跟踪支架分别安装在机器人末端和患者手术部位,机器人跟踪支架和患者跟踪支架上均装有反光球,光学定位装置通过机器人跟踪支架和患者跟踪支架分别定位患者和机器人的空间位置。手术规划和控制软件系统主要功能包括手术图像处理、手术路径规划、坐标计算、机器人控制、数据存储等。图像标定器是通过标定器的图像坐标与实际坐标配准求得图像空间与手术空间映射关系。机器人是本系统中手术路径定位的执行机构。手术路径具有5个自由度(缺少沿轴线的旋转自由度),对于完成手术路径定位的机构要求自由度必须大于等于5,再考虑到手术中必须进行手术工具的避障和路径优化,应采用大于5自由度机器人,本研究采用一种6R构型的机器人。6R构型的机器人具有6个转动的关节使连杆串行连接,每个关节由一台独立的伺服电机驱动,各关节转动不同的角度,机器人的末端导向套筒便获得不同的位置和姿态。由于手术路径是根据手术规划和空间定位计算的,手术中患者会由于手术操作发生位置变化,如何获得各关节的转动角度,使得安装在机器人末端的导向套筒恰好瞄准手术路径,并使机器人根据患者的位移自动实时调整位姿实现动态实时精确定位,是系统设计的关键。
2.2 求解机器人姿态
如图1所示,O0表示机器人基座坐标系,O6表示机器人末端坐标系,Or表示机器人跟踪支架坐标系,Ot表示手术工具坐标系,Op表示患者跟踪支架坐标系,Oc表示光学跟踪装置坐标系。用T矩阵表示两个坐标系之间的变换,例如表示从机器人跟踪支架坐标系Or到机器人末端坐标系O6的转换关系。机器人末端与基座的转换矩阵,也称为机器人位姿矩阵,本文用表示机器人的目标位姿矩阵,用表示机器人当前位姿矩阵。
手术工具与机器人的转换关系:

另一方面:

由式(1)和(2)可得:


2.3 机器人正解
首先建立机器人的D-H坐标系,见图2。

图2 机器人D-H坐标系
根据D-H参数确定机械臂转换矩阵:

其中 si=sin(θi),ci=cos(θi),θi为关节 i(i=1…6)的关节角度,下同。
机器人的姿态矩阵为:

2.4 机器人逆解
当已知机器人的目标位恣矩阵后,进一步计算各关节的转动角度,使得安装在机器人末端的导向套筒恰好瞄准手术路径,属于机器人的逆解问题。综合运用图标法和解析法,求得6R机器人逆解如下:

综上,通过手术规划和空间定位计算确定手术路径相对于患者跟踪支架的关系,通过式(3)计算机器人的目标位恣矩阵,通过式(6)计算机器人各关节的转动角度。通过机器人控制系统,控制各关节转动上述计算的角度,机器人将带动导向套筒运动至规划的手术路径,然后医生在导向套筒引导下完成置入导针和螺钉的操作。
3 系统精度验证和结果
为进行精确的精度试验,设计了一种精度检验工装,见图3。工装以A、B、C、D 4个测试球作为目标,患者跟踪支架与工装底板固定安装。试验中通过三坐标测量仪(Hexagon ROMER 2575,测量精度0.028 mm)分别测量测试球和机器人末端工具的坐标,测量坐标的差值即为机器人定位的误差。精度试验实物图,见图4。
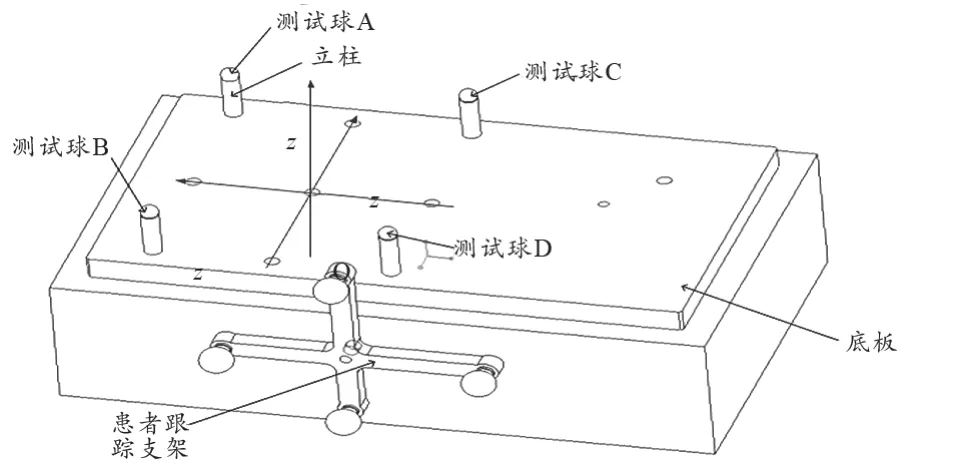
图3 精度检验工装
通过试验验证光学定位引导机器人定位的精度流程:
(1)将检验工装放置在机器人的有效工作空间内,采用三坐标测量仪点触检验工装上立柱A上端球坑中心,记录坐标值A0。
(2)移开立柱A,控制机器人使工具尖端中心到达立柱A上端球坑中心所在位置。
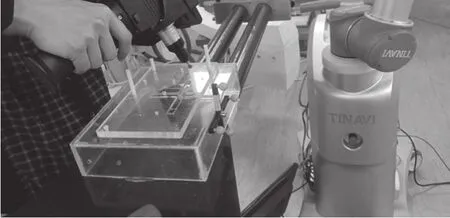
图4 精度试验
(3)用三坐标测量仪点触机器人标定杆尖端中心,记录坐标值A1。
(4)计算A0和A1的空间距离,公式为

A0A1即为系统定位误差值。
(5)移动检验工装位置至另一位置,重复以上步骤,重新测量误差。
经多次测试,测量的定位误差结果均小于1.0 mm,见表1。

表1 系统精度验证结果(mm)
4 临床试验和结果
本研究还进一步进行了临床试验研究,将受试者随机分成试验与对照两组,其中试验组使用手术机器人辅助医生实施脊柱椎弓根钉内固定手术(图5)。对照组采用常规的透视引导下医生徒手完成脊柱椎弓根钉内固定手术。通过统计分析比较两组手术的导针位置偏差,评价手术机器人系统的临床有效性和安全性。
自2016年1月~6月,在北京积水潭医院共筛选了受试者59例。其中试验组患者30例,男性13例,女性17例,平均年龄55岁,置入螺钉132颗。对照组患者29例,男性13例,女性16例,平均年龄54岁,共置入螺钉136颗。试验结果为试验组导针位置偏差明显小于对照组(P<0.001)。
5 讨论与总结
在脊柱椎弓根钉内固定手术中,由于脊柱椎弓根周围密布重要的神经和血管,螺钉置入偏差可能导致固定失效、术后疼痛、患者瘫痪甚至死亡的严重后果[11-12],通常需要切开组织充分显露椎弓根置入相关解剖标志,导致创伤大、出血多、并发症多。透视引导经皮微创置入的方法,依赖于术者经验和术中透视,螺钉误置率达4.9%~37.5%[13-16]。传统的光学导航手术系统只提供螺钉位置的视觉反馈,操作完全靠医生徒手完成,手术难度仍然很大,失败率仍然较高[17]。

图5 手术机器人辅助脊柱椎弓根钉内固定手术
光学导航引导的手术机器人系统,主要特点是具有机器人和光学导航系统综合的优势,通过光学跟踪装置实现患者的实时跟踪、通过机器人完成手术路径的精确定位,二者的有机结合使该手术系统具备了“手-眼”协同能力,为最终的手术定位精度提供有力的保障,可以有效克服了徒手手术方法、传统的光学导航手术系统和已有的机器人手术系统的缺点,实现手术路径的高精度定位,为将机器人手术技术应用于更加广泛的临床手术,保证手术质量和安全性,奠定了很好的基础。精度验证试验和临床试验研究表明,光学导航引导的手术机器人系统定位精度高,满足骨科手术中手术路径的自动和精确定位的要求。特别是利用手术机器人完成复杂上颈椎手术的成功,充分显示了机器人高精度、高安全性的特点[18]。
下一步还将进行机器人跟踪患者移动的实时性、机器人运动轨迹优化、触觉反馈等问题的研究,并进行手术效果的长期顺访研究,制定机器人临床应用规范等问题,进行手术机器人的推广应用。
[1] Bertelsen A,Melo J,Sanchez E,et al.A review of surgical robots for spinal interventions[J].Int J Med Robot,2013,9(4):407-422.
[2] Ortmaier T,Weiss H,Dobele S,et al.Experiments on robotassisted navigated drilling and milling of bones for pedicle screw placement[J].Int J Med Robot,2006,2(4):350-363.
[3] 王军强,王剑飞,胡磊,等.医用机器人辅助股骨带锁髓内针远端锁钉瞄准系统的实验研究[J].中华医学杂志,2006,86(9):614-618.
[4] 赵春鹏,王军强,刘文勇,等.骨科机器人系统全程规划模块在长骨骨折精确牵引中的研究[J].中华医学杂志,2007,87(43):3038-3042.
[5] Schulz AP,Seide K,Queitsch C,et al.Resultsof total hip replacement using the Robodoc surgical assistant system:clinical outcome and evaluation of complications for 97 procedures[J].Int J Med Robot,2007,3(4):301-306 .
[6] Togawa D,Kayanja MM,Reinhardt MK,et al.Bone-mounted miniature robotic guidance for pedicle screw and translaminar facet screw placement: Part 2-Evaluation of system accuracy[J].Neurosurgery,2007,60(2):129-139.
[7] Lonner JH.Robotic armassisted unicompartmental arthroplasty[J].Semin Arthroplasty,2009,20(2):15-22.
[8] Lefranc M,Peltier J.Accuracy of thoracolumbar transpedicular and vertebral body percutaneous screw placement:Coupling the Rosa(R)Spine robot with intraoperative flatpanel CT guidance-A cadaver study[J].J Robot Sur,2015,(9):331-338.
[9] 刘亚军,赵经纬,范明星,等.基于CT的主动红外线光学导航系统精确度影响因素分析[J].山东医药,2015,55(48):12-14.
[10] 王豫,贠超,张丰全,等.双平面导航机器人系统在不同骨科适应症中的应用研究[J].机器人,2007,29(3):200-206.
[11] Katonis P,Christoforakis J,Kontakis G,et al.Complications and problems related to pedicle screw fixation of the spine[J].Clin Orthop Relat Res,2003,411:86-94.
[12] Jutte PC,Castelein RM.Complications of pedicle screws in lumbar and lumbosacral fusions in 105 consecutive primary operations[J].Eur Spine J,2002,11(6):594-598.
[13] Mirza SK,Wiggins GC,Kuntz C,et al.Accuracy of thoracic vertebral body screw placement using standard fluoroscopy,fluoroscopic image guidance,and computed tomographic image guidance[J].Spine,2003,28:402-413.
[14] Holly LT,Foley KT.Three-dimensional fluoroscopy-guided percutaneous thoracolumbar pedicle screw placement[J].J Neurosurg,2003,99(3):324-329.
[15] Burch S.Surgical complications of spinal deformity surgery[J].Neurosurg Clin N Am,2007,18(2):385-392.
[16] Devito DP,Kaplan L,Dietl R,et al.Clinical acceptance and accuracy assessment of spinal implants guided with Spine Assist surgical robot: retrospective study[J].Spine,2010,35(24):2109-2115.
[17] Kosmopoulos V,Schizas C.Pedicle screw placement accuracy:a meta-analysis[J].Spine,2007,32(3):111-120.
[18] 田伟,王晋超,刘亚军,等.上颈椎手术方式回顾及应用机器人辅助上颈椎手术的体会[J].中国医疗器械信息,2017,7:9-13.
Design of an Optical Navigation Guided Surgical Robot System
ZHANG Weijun1, XU Jin1, ZHANG Yong1, LIU Yajun2
1.Department of Technology, TINAVI Medical Technologies Co., Ltd., Beijing 100192, China;2.Department of Medical Engineering, The 309thHospital of PLA, Beijing 100091, China
ObjectiveThe purpose of this study is to design a robotic system which integrates the robot technology and the optical navigation technology to solve the problems in the present orthopedic surgery.MethodsThrough the principle analysis, system design and manufacture, the optical navigation guided surgical robot system was completed. A special device of accuracy test was designed to validat the accuracy of the system. Then some clinical trials were conducted to verify the clinical safety and efficacy of the system.ResultsThe positioning error of the operation robot system guided by optical navigation was less than 1.0 mm. The clinical trial showed that the insertion error of the robot assisted spinal pedicle screw surgery was significantly less than that of the conventional free hand method.ConclusionThe surgical robot system with “hand-eye” is able to realize the precise location of operation path in orthopedic surgery.
surgical robot; optical navigation; minimally invasive surgery; accuracy test
TP24
A
10.3969/j.issn.1674-1633.2017.11.008
1674-1633(2017)11-0028-04
2017-08-07
2017-08-28
国家重点研发计划(2016YFC0105803);北京市科技计划(Z161100001816035);北京市科技新星计划(Z151100000315071)。
刘亚军,副主任技师,主要研究方向为生物医学工程。
通讯作者邮箱:lyj309@sina.com
本文编辑 袁隽玲
