大容量异步电动机启动特性的仿真分析∗
2017-11-28张雷
张 雷
(中国船舶研究设计中心 武汉 430000)
大容量异步电动机启动特性的仿真分析∗
张 雷
(中国船舶研究设计中心 武汉 430000)
船舶电力系统中70%~80%负载是鼠笼式异步电动机,大容量异步电动机直接启动时对船舶电力系统会造成较大的压降影响。通过对大功率异步电动机直接启动对船舶电力系统供电品质的影响的仿真分析,为大功率异步电动机的启动方式提供科学依据。
船舶电力系统;鼠笼式异步电动机;供电品质
1 引言
船舶电力系统中70%~80%的负载为电动机负载,电动机直接启动时启动电流一般能达到额定电流的4~7倍[1],若假定其定子端电压保持不变,其起动时所需要发电机提供的功率就将为其额定功率的4~7倍,(部分国产电动机的启动电流经过实际测量高达8~12倍),因此实际的发电机能直接起动的电动机负荷往往比发电机的额定容量要小得多。根据经验公式,若发电机的额定容量为P,则能直接起动的电动机的容量为但考虑到实际起动时会造成电压的跌落,为保证电压的暂态性能指标要求,这里发电机能直接起动的电动机容量往往还要低于此值[4~5]。
为了保证船舶电力系统的供电品质,在船舶电力系统的总体设计中从开始便需对实际运行中可能出现的不稳定工作状态予以足够的重视,并进行必要的分析与估算。通过对大功率异步电动机直接启动对船舶电力系统供电品质的影响分析,为大功率异步电动机的启动方式提供科学依据,从而有效地指导船舶电力系统的总体设计。
2 三相异步电动机的数学模型
异步电动机的数学模型是一个高阶、非线性和强耦合的多变量系统,在研究异步电动机的多变量数学模型时,常做出以下假设[6~9]:
1)忽略空间谐波,三相绕组对称,产生的磁动势沿气隙按正弦规律分布;
2)忽略磁路饱和,各绕组的自感和互感都是恒定的;
3)忽略铁心损耗;
4)不考虑频率变化和温度变化对绕组电阻的影响。
异步电动机的数学模型主要由电压方程、磁链方程和转矩方程组成。对定子坐标系αβ和转子坐标系α’β’同时进行变换,把它们变换到同一个旋转正交坐标系dq上,dq相对于定子的旋转角速度为ω1,如图1所示。
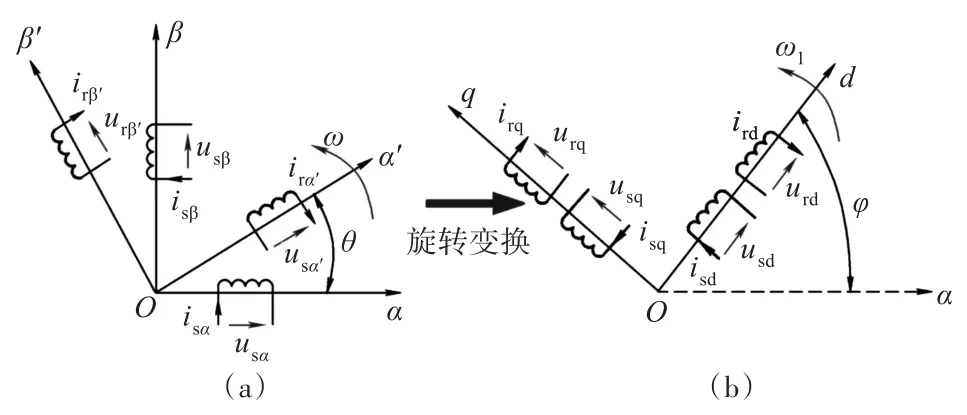
图1 转换坐标
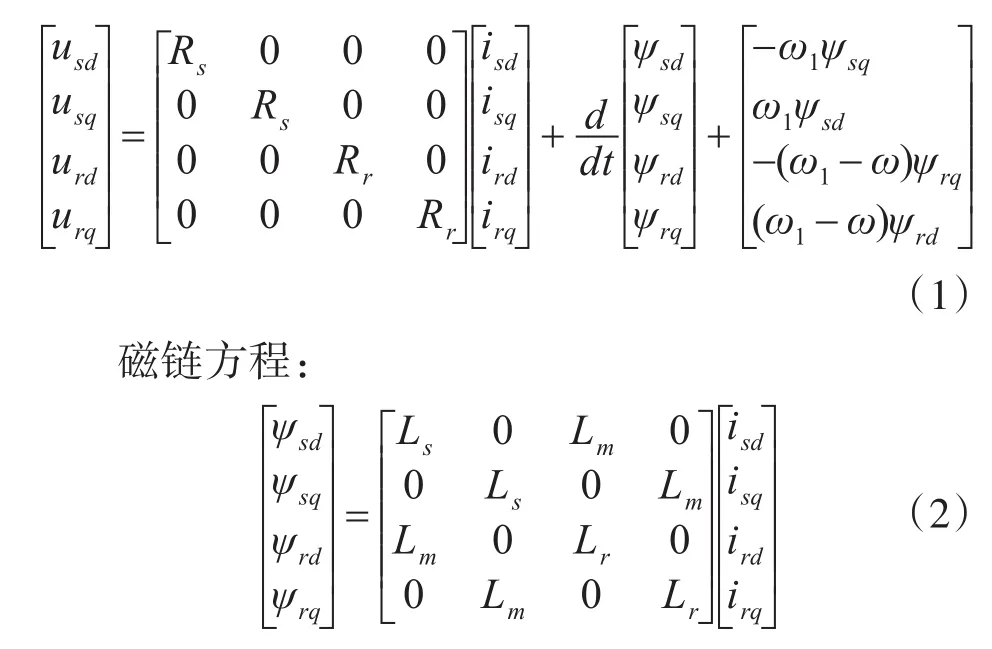
通过坐标变换和旋转变换将异步电动机三相静止坐标系下的数学模型转换为d、q旋转坐标系的简单模型,经过变换后的数学模型如下:
电压方程:

转矩方程:通过在三相异步电动机进行频率折算,可以得到转子旋转时异步电动机的平衡方程式组
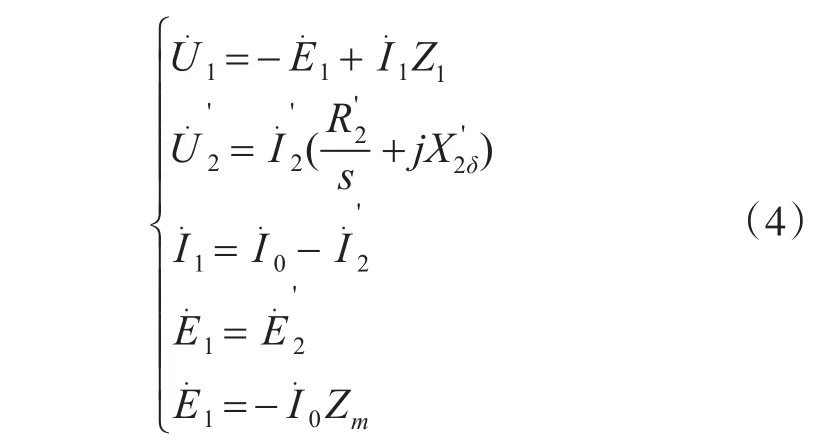
式中:U1为定子绕组相电压;E1为定子绕组侧相电动势;I1为定子绕组相电流;Z1为定子一相绕组的漏阻抗、为等效后转子绕组相电流和相电动势;s为转差率;、为等效后转子绕组电阻和漏电抗;I0为控制励磁电流。
对于容量大于100kW的异步电机,可以简化得到异步电机简化的等效电路模型,如图2所示:
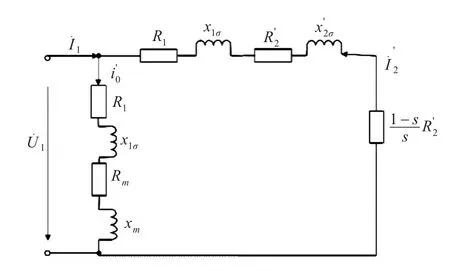
图2 简化后的异步电动机模型
由于异步电动机的转子、定子漏阻抗比较小,启动瞬间的启动电流很大。通过简化电路可知,通过控制电压U1可以有效地控制启动电流,这是直接启动与软启动的区别。
3 三相异步电动机数学模型的仿真与验证
异步电动机的数学模型可以设定为转速控制和转矩控制两种方式[10~11],考虑异步电动机的启动过程,需将其设定为转矩控制方式,同时在电动机启动前控制电机转速为0。
以下以30kW恒转矩负载特性的异步电动机为例来说明所建立的电动机模型的正确性。
30kW恒转矩负载特性的异步电动机参数如下表1所示。
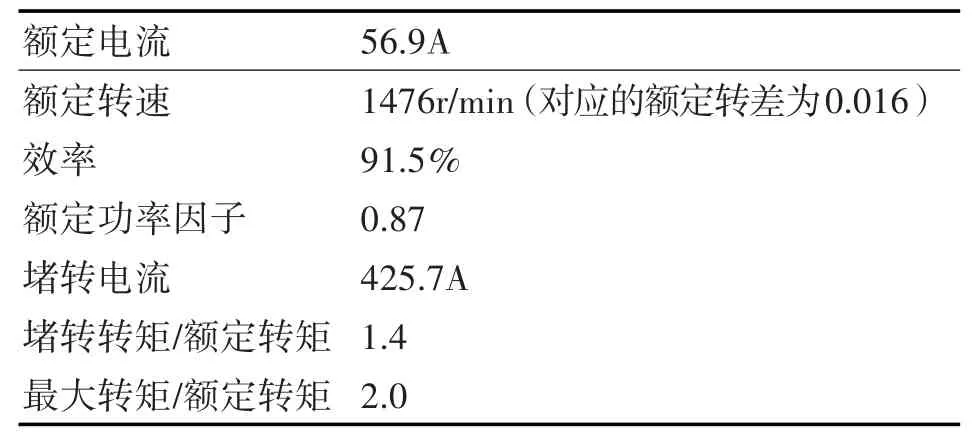
表1 30kW异步电动机参数
仿真工况设定为:380V的三相理想电压源直接带30kW的异步电动机,整个仿真时间为10s,3.0s后电动机定子通电,开始启动,电动机的负载机械特性为恒转矩负载,并给定此负载转矩为额定转矩,使得电动机启动后直接达到额定运行状态,仿真波形如图3~图5所示[12]。
从上述仿真结果可以看出,3.0s前电动机定子未通电,转速为0,3.0s后电动机开始启动,转速由0上升,此时启动电流很大,达到额定电流的7.5倍,当电动机电磁转矩与负载转矩相等时转速达到恒定,由于仿真中给定的负载转矩为额定负载转矩,转速最终稳定在0.984,为额定转速。启动过程需要8.5s,启动完成后定子电流为56A,即为给定的额定电流,因此此仿真所确定的电动机稳定运行状态为额定运行状态。即通过将给定的运行参数直接或间接(通过简单计算)后输入电动机数学模型中,若给定的负载转矩为额定转矩,则电动机可以在额定点稳定运行,因此此电动机数学模型是正确的。

图3 电动机定子电流波形

图4 电动机转速波形

图5 电动机转矩曲线
4 大功率异步电动机直接启动对电力系统影响的仿真分析
大功率异步电动机启动对380V用电设备所获得电能品质不超过《钢制船入级规范2015》规定要求[13]:电压稳态指标为额定值+6%~-10%;瞬态允差16%,恢复时间2s,最大偏离不超过20%;频率稳态允差±3%,瞬态允差±4%,恢复时间2s。
现以某型船为例,该船有前、后两个电站,前电站为2台6300V、2MW的柴油发电机组,后电站为2台6300V、4MW的汽轮发电机组。直接启动该船最大的异步电动机负载(额定电压6300V,额定功率600kW),分析异步电机直接启动对船舶电力系统的电力品质的影响。
根据相关标准和资料进行推导,电机起动时的发电机暂态电压最小值为

根据式(5)计算不同发电机组合和带载率下直接启动电机时发电机瞬态电压最小值,结果见表2。

表2 不同情况下发电机瞬态电压最小值
Matlab中搭建的一台汽轮机组与一台柴油发电机组并联运行的仿真模型如下图6所示。

图6 1TG+1DG并联运行电动机直接启动时仿真模型图
系统在带载60%的情况下直接启动600kW异步电动机,得到系统电压、启动电流和电动机转速的仿真波形如图7~图9所示。
从图7~图9可以看到:电机启动后系统电压开始下降,0.12s后达到最低值91.8%,与式(5)计算的瞬态最小电压值基本一致;在自动电压调整器的作用下,供电系统电压在0.6s稳定到正常运行范围96.8%;当电动机启动成功后,系统电压有短时升高,最高到100.3%,0.3s后进入最终稳定值。
将仿真中启动前的负载率调整至80%,直接启动600kW异步电动机,得到系统电压如图10所示。
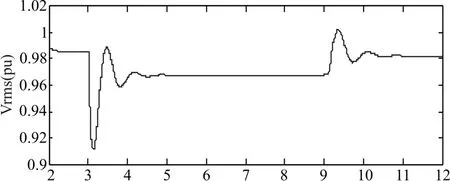
图7 电机直接起动的系统电压仿真波(1TG+1DG 60%带载率)
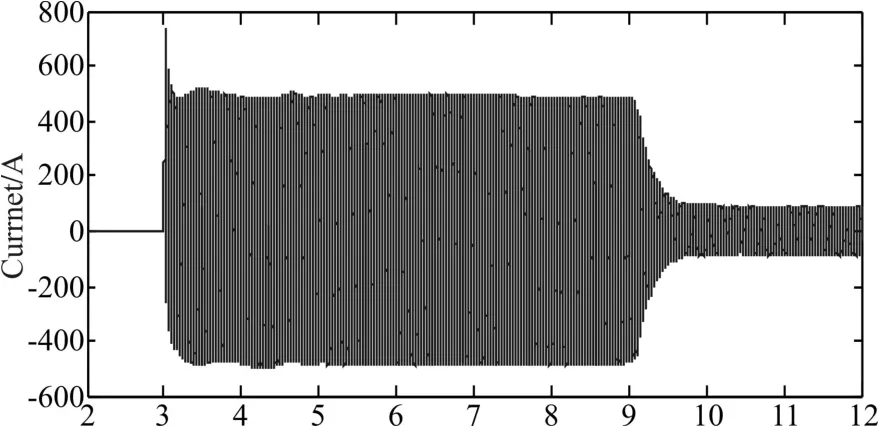
图8 电机直接起动的启动电流仿真波形(1TG+1DG 60%带载率)
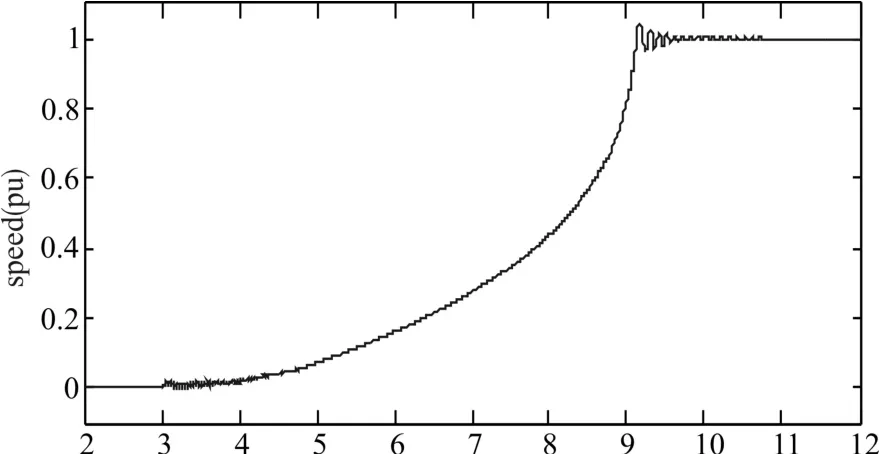
图9 电机直接起动的电动机转速仿真波形(1TG+1DG 60%带载率)
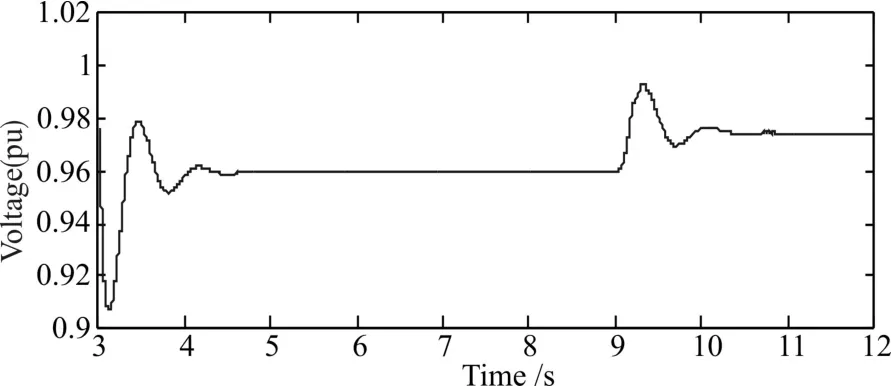
图10 电机直接起动的系统电压仿真波形(1TG+1DG 70%带载率)
仿真2台汽轮机组和2台柴发机组并网,带载量为60%,直接启动600kW异步电动机,系统电压波形如下图11所示:

图11 电机直接起动的系统电压仿真波形(2TG+2DG 70%带载率)
对比以上结果仿真,可以发现电压降与启动前系统在网机组总容量有关,启动前机组负载率影响不大。
现在以分析1台汽轮机组和1台柴发机组并联为例,带载60%的情况下电动机直接启动过程,分析电能质量是否超过《钢制船入级规范2015》要求。
1)稳态指标
计算中压发电机到380V用电设备的各项压降:(1)发电机下垂特性3%(189V)及电压波动率0.5%(32V);
(2)保守计算500m中压线路压降19V;
(3)假设中压变压器电压调整率为4.6%(290V);
(4)《钢制船入级规范2015》规定低压配电板至负载线路电压降不大于额定电压的6%(24V)。
以上最严苛的压降条件折算为中压侧,全部压降为908V,为额定电压的14.41%。
远端380V用电设备的允许的最低稳态电压380×90%=342V,按变比折算到中压侧为85.5%。可见经全电力系统严苛条件的全部压降后,远端负载刚好可以满足界面标准。而中压电动机直接启动的稳态电压,应维持在发电机下垂特性及电压波动率范围内,即96.5%~100.5%内。表2中可以看到,电动机启动过程中压系统的稳态电压是在这一范围内的。
2)瞬态指标
由图7中可以看出,电动机直接启动造成的电压瞬态下降并不超过16%,恢复时间也小于2s。还需考核该压降是否造成380V用电设备所获电压低于要求。
考虑(1)变压器T型等效电路中励磁阻抗远远大于漏磁阻抗;(2)一次侧电压降低时励磁阻抗的变化对变压器电磁传感的影响并不大;可近似认为中压侧瞬态电压按照变比传递至低压侧。
要满足远端380V用电设备的最大偏离不超过20%,即最低不低于304V,那么计及全电力系统稳态压降908V后,中压发电机暂态电压压降不应大于604V,即发电机暂态电压最小值不宜低于90.41%。根据表2的计算结果,为了不使远端负荷受瞬时低电压影响,供电系统应确保有2台或2台以上机组在网。
5 结语
本文针对异步电动机容量配置需求越来越大的趋势,对大容量异步电动机启动特性进行了分析,以此做出启动时对船舶电力系统电力品质的危害评估。通过对大容量异步电动机直接启动进行了仿真分析,对大容量异步电动机启动特性有了较为全面的了解,给大容量电动机启动方式的选择提供了科学依据,从而有效支撑了船舶电力系统的总体设计。
1)大容量异步电动机直接启动造成的系统电压降与启动前系统在网机组总容量有关,与启动前机组负载率关系不大;
2)以600kW异步电动机为例,直接启动时需两台及以上的机组在网才能保证中低压侧的电力品质;
3)供电系统要求中压电动机直接启动前需向供电系统发出重载问询,电站监控装置收到重载请求后,检查当前系统有大于一台机组在网,且电机启动后不触发增机条件,否则先进行增机。
[1]徐维克.三相异步电动机起动方式的讨论[J].船海技术,2001(5):123-125.
[2]王国伟,林万里.三相异步电动机启动特性研究[J].工业科技,2005(6):44-46.
[3]耿大勇,贾丹,李振刚.基于Simulink异步电动机软启动控制系统的仿真[J].辽宁工学院学报,2006(6):141-144.
[4]罗得荣,邓建国,罗隆福.绕线式异步电动机启动过程仿真研究[J].计算机仿真,2005(2):97-100.
[5]赵建文,翟文利.三相异步电动机起动方式的分析与选择[J].电机技术,2006(3):46-48.
[6]辜承林,陈乔夫,熊永前.电机学[M].武汉:华中科技大学出版社,2005:130-145.
[7]李红梅,张敬华,李忠杰.异步电动机数学模型及器件开关损耗计算[J].微电机.2003(1):12-15.
[8]顾绳谷.电机及拖动基础(下)[M].北京:机械工业出版社,1997:88-89.
[9]高景德,王详衍,李发海.交流电机及其系统分析[M].北京:清华大学出版社,1993:350-370.
[10]孙淼洋.浅析三相异步电动机的启动分类[J].硅谷,2010(2):47-49.
[11]万玉晶,邱立伟等.大容量异步电动机启动特性研究[J].中国测试.2014(11):132-136.
[12]马向国,汪庆年等.基于MATLAB语言的异步电动机起动过程分析[J].南昌大学学报(工科版).2002(2):70-73.
[13]中国船级社.钢质海船入级规范2015[M].北京:人民交通出版社,2015:6-8.
Simulation Analysis of Starting Characteristic for Large Capacity Asynchronous Motor
ZHANG Lei
(China Ship Research and Design Center,Wuhan 430000)
The squirrel-cage asynchronous motor occupies 70%~80%load of the ship power system.When the large capacity asynchronous motor started,which will cause a large voltage drop in the ship power system.Through the simulation and analysis of the influence of the large capacity asynchronous motor on the power quality of the ship power system,the scientific basis of the starting mode of the large capacity asynchronous motor is provided.
ship power system,squirrel-cage asynchronous motor,power quality
TM314
10.3969∕j.issn.1672-9730.2017.10.016
Class NumberTM314
2017年4月9日,
2017年5月27日
张雷,男,工程师,研究方向:船舶电力系统总体设计。
