智能导诊服务机器人的设计与实现
2017-11-27陈曦杨雅慧赵嘉麒吴亚联
陈曦+杨雅慧+赵嘉麒+吴亚联
摘 要:基于目前医疗服务的需求,文中设计了一款用于医院智能导诊服务的机器人。该机器人融合了STM32硬件平台、传感器应用、图形界面设计、路线规划等技术,可实现就诊流程导诊、科室路线指引以及常规心率体温数据的测量等。文章从系统功能设计、硬件模块搭建、系统软件实现、创新点等方面,详细描述了整体的设计方案和开发过程。实验和使用表明,该智能导诊服务机器人界面显示清晰,工作运行稳定,可满足人们就医过程中的服务需求。
关键词:服务机器人;流程导诊;路线指引;人机交互
中图分类号:TP242.6 文献标识码:A 文章编号:2095-1302(2017)11-00-04
0 引 言
在《中国制造2025》规划中[1],机器人与高档数控机床被列为政府需大力推动实现突破发展的十大重点领域。人工智能程度的不断加深和人民生活水平的不断提高,使人们对医疗服务的要求由量变转为质变,因此医疗服务机器人市场前景广阔[2]。
目前在大型综合性医院,由于专业分工精细,一个诊疗过程所涉及的功能单元往往分布在不同楼宇、不同楼层的不同位置。由于医院功能单元布局有调整、患者对医院环境不熟悉,导致滞院时间较长、诊疗效率降低,患者满意度下降。医院虽积极设立导诊岗位、建立多媒体导诊系统等,但仍存在与患者沟通困难,获取信息速度较慢、众多导诊岗位需增大人力资源成本等问题。
现如今,借助现代机器人科技打造的智慧医疗,是解决目前医院就诊问题的一大趋势。本文主要阐述了智能导诊服务机器人[3]的设计方法与实现过程,在STM32平台[4]上通过硬件传感器模块[5],与系统软件相结合,实现智能导诊、智能指引[6]等服务功能,为改善医疗环境提供思路。
1 系统功能分析与总体设计
1.1 系统功能分析
我们初步设计了一款用于医院智能导诊的服务型机器人。主要实现以下功能:
(1)智能导诊:显示不同患病类型的就诊流程及相应的就诊科室,对患者进行指引;
(2)智能指引:患者输入去往的科室即可显示目的地位置及对应的楼层平面图,确认由机器人带领后,可实现机器人路线指引;
(3)常规检查:接触式传感器,智能化检测人体心率血氧、体温等基础数据;
(4)娱乐放松:机器人外设显示屏可显示多种动态表情,仿佛机器人具有人的情感,同时机器人可进行语音识别,对问题进行简单回答,或播放音乐、笑话等;
(5)预约挂号:可自主预约就诊时间及专家等,简化挂号流程。
1.2 系统功能设计框图
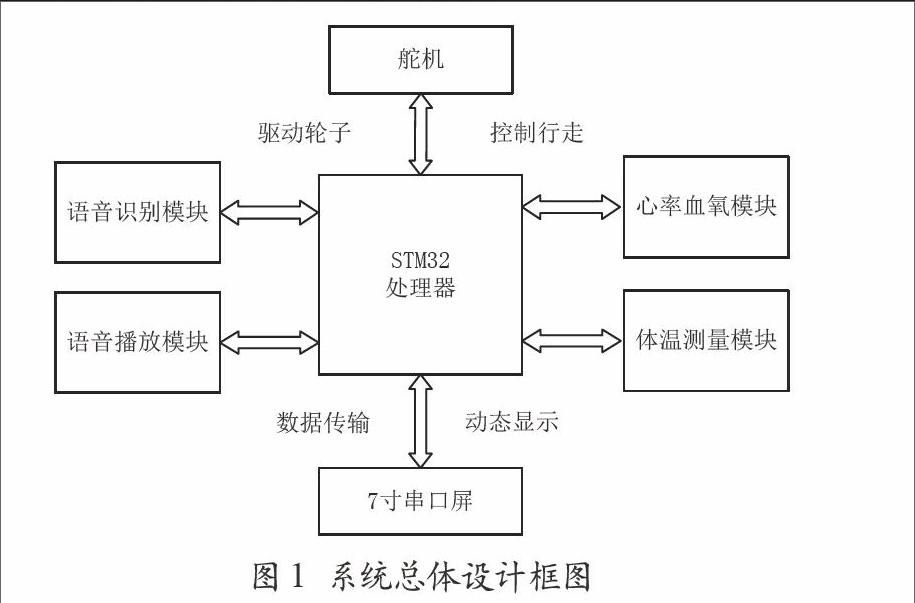
结合医疗导诊服务的需求分析,本智能导诊服务机器人的核心由STM32微处理器、心率血氧传感器、语音识别模块等传感器共同组成。其中,STM32微处理器对各传感器收集到的数据[7]进行处理,控制各模块正常运作。通过接触体温测量传感器和心率血氧传感器模块获得体温和心率血氧数据。舵机用于机器人的轮子驱动,保证机器人正常行走。驱动模块用于确保直流电压下的工作电压、电流稳定。娱乐放松功能主要由语音识别模块、语音播放模块、7寸液晶串口屏等构成。语音识别模块收集外界语音信息,将词汇转换成计算机可读输入,通过语音播放模块输出相应的回答语句。7寸串口屏显示导诊机器人的动态表情,使機器人更加人性化、智能化。
系统总体设计框图如图1所示。
2 硬件模块设计与实现
2.1 体温测量模块
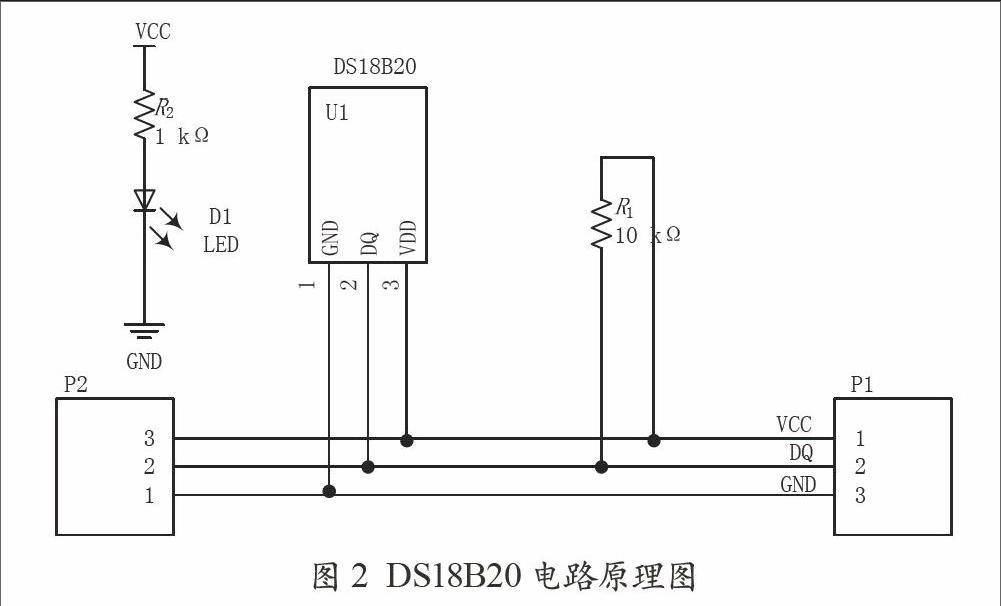
体温传感器是能感受体温并转换成可用输出信号的传感器,通过使用者接触该传感器获取人体体温,利用温度传感器输出电信号,再将电流信号发送给STM32控制器进行处理。我们使用DS18B20温度传感器,该传感器是美国DALLAS半导体公司继DS1820之后最新推出的一种改进型智能温度传感器,能够直接读出被测温度并可根据实际要求通过简单编程实现9~12位的数字值读数方式。
电路原理如图2所示。
2.2 心率血氧测量模块
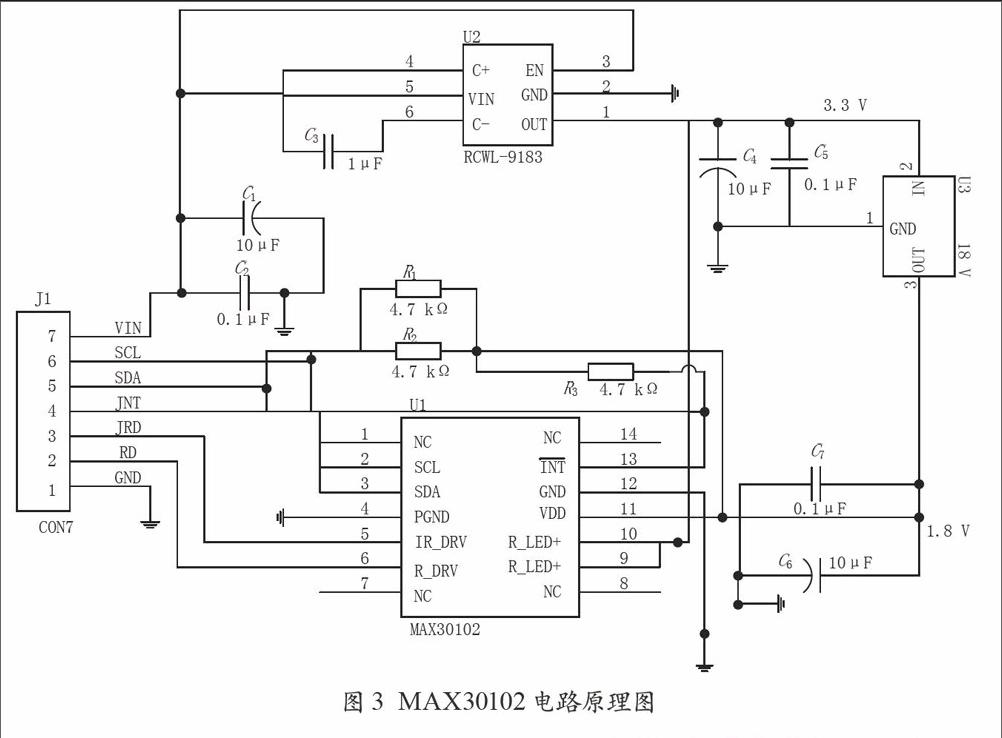
心率血氧传感器模块利用特定波长红外线对血管末端血液微循环产生的血液容积变化敏感的特性,检测由心脏跳动引起的指尖血液变化,经过信号放大、调整等电路处理。其中SON1303输出同步于脉搏跳动的脉冲信号,从而计算脉率,SON7015输出反映指尖血容积变化的完整脉搏波电压信号,将测量的心率血氧数据发给STM32处理器进行处理。我们采用MAX30102心率血氧模块,便于基础数据测量。
电路原理如图3所示。
2.3 语音识别模块
语音识别模块是一种基于嵌入式语音识别技术[8]的模块,可通过串口输出识别结果,主要包括语音识别芯片和一些其他附属电路,能够方便地与主控芯片通信,实现语音交互。
本系统采用了ICRoute公司生产的LD3320语音控制芯片来实现语音的简单识别。该模块利用非特定人语音识别技术,用户无需进行录音训练;具有可动态编辑的识别关键词列表,只需把识别的关键词以字符串的形式传送进芯片,即可在下次识别中立即生效;支持用户自由编辑50条关键词,在同一时刻,可在50条关键词中进行识别,终端用户可根据场景需要,随时编辑和更新这50条关键词的内容。电路原理如图4所示。
2.4 语音播放模块
本模块使用LM102语音播放模块,该模块具备两组接口,支持音响功放连接,价格低廉,工作稳定。
其电路原理如图5所示。
2.5 运动控制模块
本模块主要通过微处理器输出的PWM波控制舵机的信号线实现机器人的运动控制[9]。舵机信号线接收来自主控板的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计相连,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而使目标停止。在该系统中,舵机驱动轮子转动,驱使机器人正常行走。endprint
3 系统软件设计与实现
3.1 初始化界面设计
本作品显示界面(串口屏)主要负责显示服务信息和接收来自核心处理器STM32传输的数据。首先进行界面初始化,受到信号触发进入显示界面,显示子界面分别为智能导诊、智能指引、常规检查、预约挂号。该部分程序的实现基于C编程来完成。
其整体设计和基本算法的架构流程如图6所示。
3.2 串口屏各功能界面设计
3.2.1 智能导诊
此功能提供智能化导诊服务,界面显示不同患病类型的就诊流程及相应就诊科室,对患者进行指引,帮助患者了解病症和就医步骤,极大地减少了就诊时间,其整体设计流程如图7所示。
3.2.2 智能指引
此功能可为患者提供诊室的位置信息,机器人自动指引路线[10]。界面有“是否需要指引?”选项,使用者可以根据自身需求进行选择,可同时选择不同科室,界面上会展示不同科室对应的楼层平面图,便于使用者找到对应科室的位置,其整体设计的架构流程如图8所示。
3.2.3 常规检查
此选项提供医院所需最简单的常规检查流程,以减少病患排队等待时间。使用者通过接触机器人头部的体温传感器和心率血氧传感器,智能化测量体温和心率血氧数据,界面将会显示测试结果并对异常情况进行分析。其整体设计架构流程如图9所示。
3.2.4 预约挂号
此功能提供了预约挂号服务,使用者可直接选择预约挂号选项,对就诊时间、就诊类型、就诊专家等进行自主选择和填写,填写成功后可直接显示预约成功,其整体设计的架构流程如图10所示。
4 创新点
4.1 智能化
使用者通过接触体温和心率血氧传感器即可收集相应测量数据并显示在屏幕上,对异常数据进行分析,代替人力测量,可大大节约时间。同时整个系统有多种传感器协同工作,及时收集有用信息提交给微处理器进行处理分析。
4.2 交互性
串口屏可显示丰富的动态表情,使导诊机器人更加人性化,交互系统的语音识别模块和语音播放模块可对使用者提出的问题进行简单回答,并通过播放音乐、笑话等安抚使用者,减弱其消极的情绪。
4.3 自主度
使用者可通过串口屏进行自主选择,查询就诊科室、病房位置、就诊流程及路线信息等,信息查询和预约挂号一体化,自主度高,获取信息方式灵活、快捷。
5 结 语
本文完成了智能导诊服务机器人的系统设计,以STM32微处理器为核心,硬件传感器模块和系统软件设计相结合,成功实现了智能导诊、智能指引、常规检查、预约挂号等功能。并且经过多次调试,机器人工作稳定,可有效解决病患在就医过程中滞院时间长、寻找科室难等问题,较大程度改善了医院的服务环境,方便人们就医,是医院服务领域一项重要的改革。作品实物如图11所示。
随着人工智能在社会的不断应用,相信导诊服务机器人在医疗领域会有更好地推广。
参考文献
[1]国务院.中国制造2025[M].北京:人民出版社,2015.
[2]黄敦华,李勇,陈容红.医疗服务机器人应用与发展研究报告[J].机电产品开发与创新,2014,27(3):6-8.
[3]张毅,孙纯兴,李敏. 医疗服务机器人功能设计及实现[J].机器人技术与应用,2011(6):36-39.
[4]刘火良,杨森.STM32库开发实战指南[M]. 北京:机械工业出版社,2013.
[5]周真,苑惠娟.传感器原理与应用[M].北京:清华大学出版社,2011.
[6]蔡军,张毅,刘璐,等.基于模糊控制的医疗服务机器人的设计与实现[J].实验科学与技术,2014,12(2):38-40.
[7][美]Goldsmith A.无线通信[M].杨鸿文,等译.北京:人民邮电出版社,2007.
[8]陈景帥.智能空间下语音交互系统的研究与实现[D].济南:山东大学,2010.
[9]徐国保,尹怡欣,周美娟. 智能移动机器人技术现状及展望[J].机器人技术与应用,2007(2):29-34.
[10]丁易新. 基于单片机的移动机器人路径规划模糊控制器设计[J].自动化与仪器仪表,2009(1):25-28.endprint
