一种新型的多功能智能轮椅
2017-11-27张奎王建南
张奎+王建南

摘 要:针对老人和身体残疾者经常出现在没有别人帮助、无法正常进行日常生活的情况,文中设计了一款可以帮助身体残疾和行动不便老年人的智能轮椅。在快节奏的生活中,我们通常没有足够的时间去照顾别人,所以老年人和身体残疾的人群可独立进行日常生活显得尤为重要。文中设计的智能輪椅的导航系统由加速度计和磁力计组成,系统设有一个导航板用于轮椅方向的控制,可以手持或佩戴在头上。该轮椅还具有四个超声波传感器、实时位置跟踪和智能避障系统,并利用RFID跟踪建筑物内的轮椅和语音导航系统来辅助视障者。
关键词:智能轮椅;位置跟踪;智能避障;RFID
中图分类号:TP393;TH789 文献标识码:A 文章编号:2095-1302(2017)11-00-02
0 引 言
轮椅是帮助残疾人士进入社会交流最常用的工具。据世界卫生组织统计,全球有超过6 500万人需要坐轮椅,占全球人口的1%。我国有超过3 000万人口具有与运动有关的身体残疾。对身体残疾者和老年人来说,能够生活自理至关重要。轮椅作为一种可以帮助这些人在不需要别人帮助的情况下进行正常生活的工具具有重要意义。本文设计的新型多用途轮椅可以帮助这些残疾人士实现自由行动。
目前国内外一些学者在这方面做了许多工作,文献[1]提出的一种可用于车辆附近障碍物检测、交通信号灯检测的系统便可以扩展到轮椅上。
S.Manogna等人[2]提出了一种在加速度计帮助下具有导航功能的轮椅系统,但该系统缺乏障碍物检测系统。松本yoshio提出了基于眼球和大脑运进行动控制轮椅的人机接口,为了使轮椅运动,使用者必须查看他想要到达的目的地,然后通过点头或者摇头控制轮椅的运动或停止。但该系统的椅子后面必须连接计算机对数据进行处理,导致系统体积很大且成本高昂。同时该系统缺少障碍物检测能力,对盲人没有太多用处。
本文设计的轮椅在原有轮椅的基础上拓展了诸多功能,可以被身体残疾、视力受损、行动不便的老年人使用。文中设计的控制系统可以安装在任何电动轮椅上,无需做过多修改,同时还可提供语音指导工具,对视障人士进行语音指导。其子系统使用常用的廉价MP3播放器与微控制器连接,预录音文件放在该MP3中,存储在微控制器中的算法根据要求执行所需剪辑,从而向用户提供必要的帮助。
1 系统概述
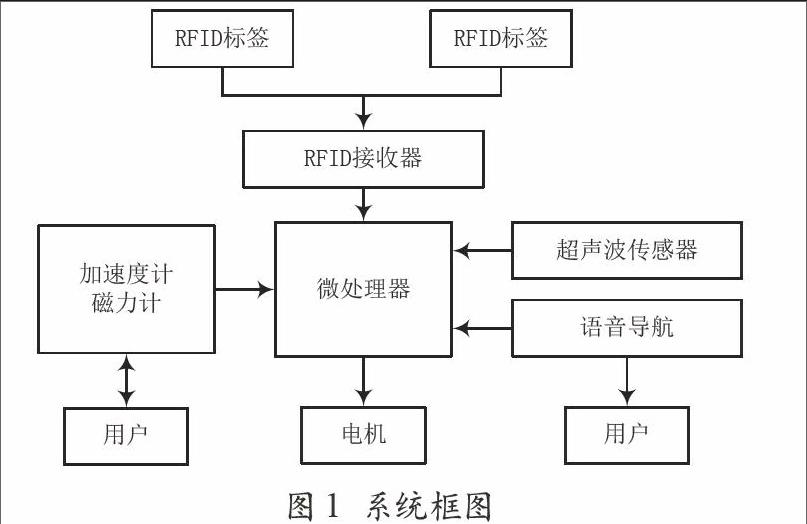
轮椅的整个控制系统可以分为导航子系统、定位子系统、语音导航子系统、障碍物检测子系统四大模块。系统整体框图如图1所示。
1.1 导航子系统
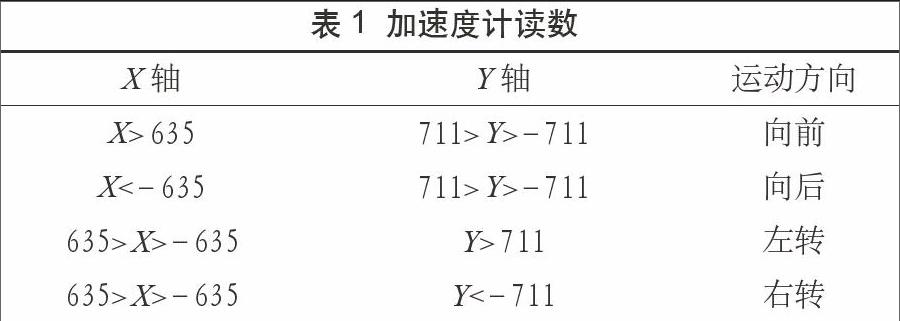
该子系统用于轮椅导航,便于用户将轮椅向任何方向移动。该系统主要由加速度计和磁力计组成,外形为一个小的导航板,可以戴在手腕或头上,按照所需的运动方向倾斜导航板便可以使轮椅向相应的方向移动。X和Y轴的数据从加速度计中读取,与上限和下限比较,如果在范围内,则执行相应动作。该过程可以防止由于意外冲击造成读取数据突变,导致椅子失速,对用户造成伤害。表1所列为读数的上限和下限。
磁力计用于指示方向,对于有视力障碍的人来说至关重要,地磁北方向可以通过磁力计显示,用户通过振动垫感知该方向。振动垫由四个振动马达和一个开关组成,当用户需要指引北面方向时,位于北部的电机开始振动。
1.2 定位子系统
该子系统使用有源RFID技术构建,用于实时定位监控轮椅在室内的位置。将有源RFID标签放置在室内一些重要地方,用户可以通过语音系统获得当前轮椅所在位置,比如靠近楼梯,门口或者不同路径通向不同地点的路口。轮椅进入便签范围后,附在轮椅上的RFID接收器会获得标签的唯一ID并将信息传递给微控制器。微控制器将接收到的ID与预先存储的ID列表进行对比,找到信息相匹配的ID位置,生成MP3播放器控制信号。
1.3 语音导航子系统
该子系统由一个MP3播放器和微控制器组成,适合为视觉受损的人群提供导航。MP3播放器中预装了剪辑音频,当轮椅运动到RFID标签范围内时,微控制器将接收到唯一的标签ID,然后向MP3播放器发送信号,播放特定的剪辑音频,从而向用户提供周围的环境信息。用户通过耳机收听音频,可以很清楚地知道自己目前所处位置,以及可以到达的地方。
1.4 障碍物检测子系统
该子系统由超声波传感器组成,用以检测障碍物。这些传感器可以发出频率远高于人耳可感知的频率范围的声波,这些声波撞击到物体后会产生反射声波并被传感器接收,因此,通过测量声波来往的总时间,就可以计算出离障碍物的距离。其计算公式为:
式中:s为离障碍物的距离,t为测量声波来回的时间。在该系统中,我们设定40 cm为极限。如果任何障碍物接近该极限,蜂鸣器便会被激活并告知用户。但如果障碍物更靠近轮椅,则停止该方向的运动。
该系统的工作流程如图2所示。
2 硬件选择
2.1 加速度计和磁力计
加速度计是一种微电机系统,可以测量无论是由重力还是运动所产生的加速度。磁力计用于测量磁场强度,在某些情况下还可以测量空间的磁场方向。本文使用LSM303DLHC模块,该模块由一个数字3轴加速度计和3轴磁力计构成,而且满足I2C通信协议。该模块的加速度测量范围为±2~±16 g,满量程磁场测量范围为±1.3~±8.1 Gs。
2.2 超声波测距仪
超声波传感器的工作原理类似雷达或声纳,它们都会产生高频声波并接收反射回来的声波。传感器计算发送信号和接收回波之间的时间间隔,计算确定距离物体的位置。本文使用HC-SR04超声波传感器,工作频率为40 Hz,可以测量2~350 cm的距离,精度为3 mm。
2.3 有源RFID
为了自动识别和跟踪附加到对象的标签,本文采用无线非接触式射频识别(RFID),利用射频电磁场进行数据传输。有源RFID标签采用电池供电,功耗低,识别范围相对较长。本系统使用的RFID工作频率为433 MHz,识别范围为4~5 m。endprint
3 结 语
本文设计的系统可为身体残疾人士、视力受损人士和老人提供一些正常生活所需的帮助。该系统成本低、易实现,配有用于轮椅运动的加速度计和用于障碍物检测的超声波传感器。该系统的语音导航功能可以随时指引用户到达目的地。因此,该系统具有一定的现实意义,可有效协助需要帮助的人群。
参考文献
[1] Srinivasavaradhan L,Chandramouli G. Automated vehicles for physically and visually challenged[J].International Conference on Perspective Technologies and Methods in MEMS Design,2008,4(3):40-43.
[2] Manogna S ,Vaishnavi S at al.Head Movement Based Assist System for Physically Challenged[J].4th International Conference on Bioinformatics and Biomedical Engineering (ICBBE),2010,6(2):1-4.
[3]刘钊.基于多传感器信息融合的智能轮椅避障运动控制研究[D]. 北京:北京工业大学,2015.
[4]郭清锋.智能轮椅室内定位系统的研究[D].天津:天津科技大学,2012.
[5]张建国,李军,王芳.智能轮椅室内避障导航及仿真实现[J].计算机仿真,2011,28(3):203-206.
[6]曾辛未,张华,刘继忠.智能轮椅GPS定位导航系统设计[J].现代电子技术,2016,39(11):162-163.
[7]李雪莲.老年智能轮椅设计研究[J].机械设计, 2014,31(4):101-102.
[8]周伟,谢存禧.基于单片机的多功能智能輪椅的模块化设计[J].机械设计与制造,2013(3):18-20.
[9]牛风英,张华,刘继忠,等.智能轮椅避障测距控制系统[J].传感器与微系统,2008,27(10):107-108.endprint
