基于体感控制的扑翼飞行器
2017-11-27章逸凡王源杰倪博文陈恒关帅
章逸凡+王源杰+倪博文+陈恒+关帅

摘 要:文中设计了一款基于体感控制的扑翼飞行器。该飞行器利用操纵者手部的变化实现对飞行器姿态的控制,利用头部运动实现观察视角的控制,使操纵者能够更为有效的体验真实飞行的感觉。此外,该飞行器还能够模仿鸟类的飞行运动模式,具有仿生性好、高效节能等特点,可用于驱鸟、巡逻等领域,具有广阔的市场前景。
关键词:体感控制;扑翼
1 作品简介
本项目旨在开发并推广一种基于体感控制的扑翼飞行器,文中设计的飞行器摒弃常用的遥控手柄控制,利用操纵者手部的变化实现对飞行器姿态的控制,利用头部运动实现观察视角的控制,使操纵者能够更为有效的体验真实飞行的感觉。飞行器采用扑翼结构,能够有效模仿鸟类的飞行运动模式,具有仿生性好、高效节能等特点。
该项目市场前景广阔,能够有效用于机场驱鸟、安保監控等领域,具有较高的商业价值。它利用机翼关节的上下扑动产生升力实现飞行。其所具有的仿生性兼具灵活性是其他无人机很难做到的,更重要的是,针对该无人机的成熟产品尚未在市场中普及,因此更易在市场中立足,且该飞行器融入了当今炙手可热的体感控制与VR控制技术,设计新颖,具有极大的市场扩展前景。实物如图1所示。
1.1 结构设计
分析了不同驱动结构的优缺点,并进行计算与仿真,最终确定使用双曲柄摇杆机构进行传动,结构如图2所示。
1.2 手势信号的解读与分析
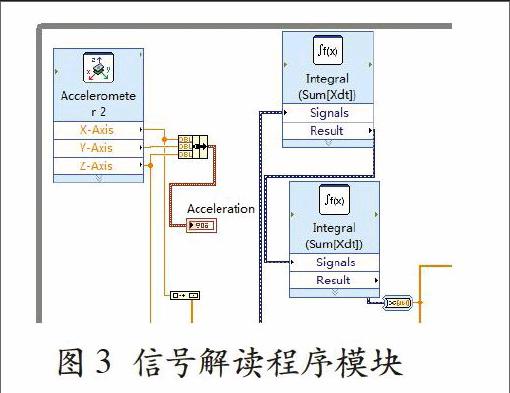
利用放置在手上的加速度传感器实现对不同动作加速度信号的采集与分析,将快速变化的加速度信号通过双重积分和相应运算转变成渐变的相对位移信号,实现了对扑翼频率、转向角度、俯仰角度的手势控制。利用特定方向的信号功率谱分析实现特定指令信号的识别,以进行相应的控制操作,例如从起飞模式切换至巡航模式的控制。信号解读程序模块如图3所示。
1.3 飞行器控制与通讯
扑翼飞行器主要包括三种运动的控制,分别为扑翼的频率,决定着飞行器的飞行速度与飞行状态;尾翼左右转向角度,决定着飞行器的转弯半径;尾翼的俯仰角度,决定着整个机体的俯仰角度。而我们相应的肢体动作就是为了分别实现这三个运动的单独控制。
为了将手部采集的信号传送至电脑进行分析并最终控制飞行器,我们采用图4所示的总体通讯模式。
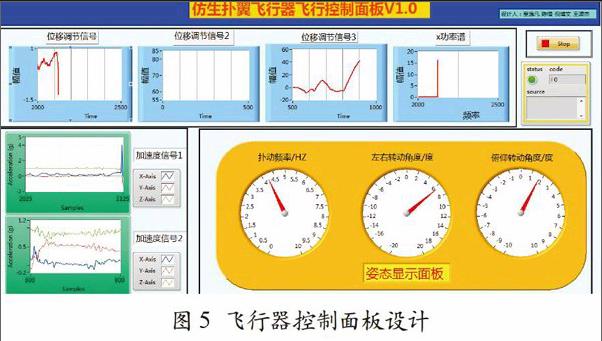
为了更好地显示飞行控制状态,我们设计了相应的控制显示面板,该部分与之前的信号采集分析部分都基于LabView平台进行设计,其既与控制模块有较好的兼容性,也具备美观的UI界面编辑能力。为了增加该飞行器操作的便携性,我们也开发了一款能够在移动设备上使用的控制界面(如IPAD),可以实时显示飞行器的飞行状态,控制面板如图5所示。
2 创新点
(1)摆脱了传统遥控器操控的飞行器控制模式,利用安装在手部的传感器实现对不同手势的区分与解读,并控制相应的飞行姿态。
(2)对扑翼飞行器的结构进行设计与优化,采用仿生尾翼设计,提高了飞机的机动性。
(3)结合VR技术,令用户可以以鸟的视角进行控制,体验沉浸式交互。
3 市场前景
“飞鸿”飞行器从原理上规避了与旋翼机的同类竞争,相较传统的固定翼与旋翼飞行器,扑翼具有极高的飞行效率与极低的噪音,在很大飞行速度范围内具有高机动性。扑翼机外形酷似生物,易于混入生物群体,或本身可组成群体,伪装成鸟群,难被发现或探测。扑翼无人机可以携带侦察设备与武器作为单兵侦察与攻击平台。可进行特殊侦察,作为信号中继站等;鸟型扑翼机可以伪装为猛禽的造型,辅以声音,高效完成机场附近的驱鸟工作;扑翼机轻便,容易折叠携带,安全稳定起降对场地依赖小。“飞鸿”扑翼无人机市场主要定位于无害化驱鸟和隐身化巡逻,具有广阔的市场前景。endprint
