农机车载系统的远程实时监控终端设计
2017-11-24
(重庆邮电大学 通信与信息工程学院,重庆 400065)
农机车载系统的远程实时监控终端设计
卜国顺
(重庆邮电大学 通信与信息工程学院,重庆 400065)
以嵌入式处理器STM32F103为核心,利用GPS定位技术、CAN通信技术、GPRS通信技术设计了一种专门针对农机领域的车载监控终端。该终端能够实现车辆位置信息、行车状态信息的实时采集与远程无线传输;同时,能够处理远程监控中心下达的指令,对车辆进行限速、锁车、设置电子围栏。目前,该终端已经在洛阳某农机公司的农机车辆上进行了应用,运行稳定可靠,为车辆快速故障定位、维修、管理提供了真实数据支撑。
GPS;中断;STM32F103;CAN总线
引 言
农机租赁作为一种新的商业模式可以有效解决农民购买先进农机设备资金短缺的问题,促进我国农业机械化的发展,同时也有利于传统制造企业的转型升级[1]。随着农机租赁产业的发展,车辆丢失、车辆故障、车辆损坏等问题变得更加突出。如何对农机车辆进行高效管理、快速维修减少损失成为运营单位面临的重要问题[2-3]。基于物联网的车载终端能够实时将车辆信息上传至监控中心,运营单位可以远程监控车辆运行参数,根据车辆数据的变化及时采取相应的措施。
1 车载终端硬件设计
车载终端以处理器STM32F103为核心。外围电路包括GPS模块、GPRS模块、CAN通信模块、振动传感器模块、电源模块。整体框图如图1所示。
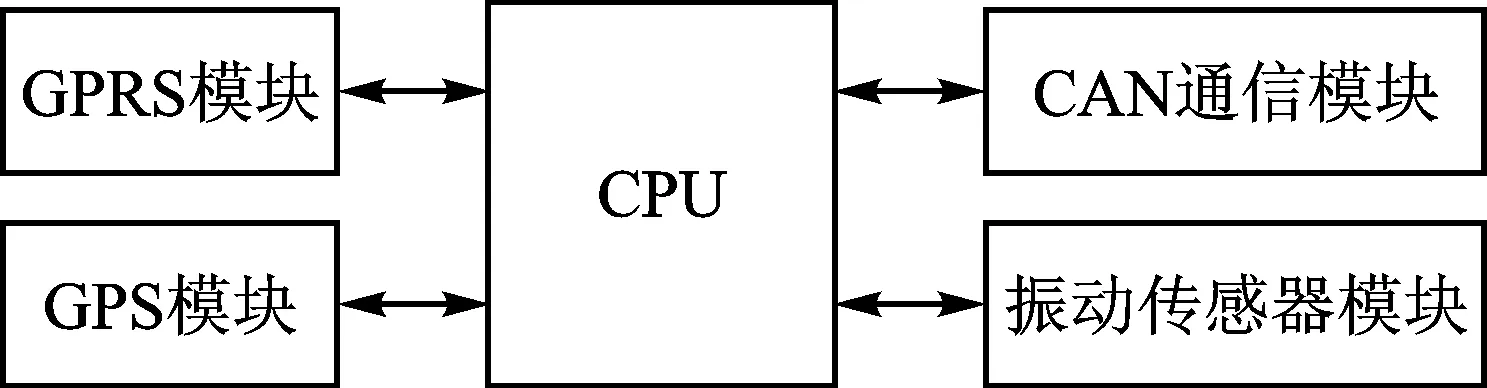
图1 车载终端硬件架构图
1.1 处理器芯片的设计
考虑本设计主要用到了STM32的串口、CAN功能、GPIO、中断、BOOT模式选择等资源,农机车辆可供安装终端的空间狭小,对器件的尺寸要求严格。综合以上因素,CPU选用了TI公司旗下的STM32F103C8T6,其内核为Cortex-M3,最大特点是低功耗、低成本、高性能。该芯片为48引脚封装,是该系列占用空间面积最小的一款。内置64 KB的Flash闪存和20 KB SRAM,能够满足设计要求[4]。外围总体设计如图2所示。
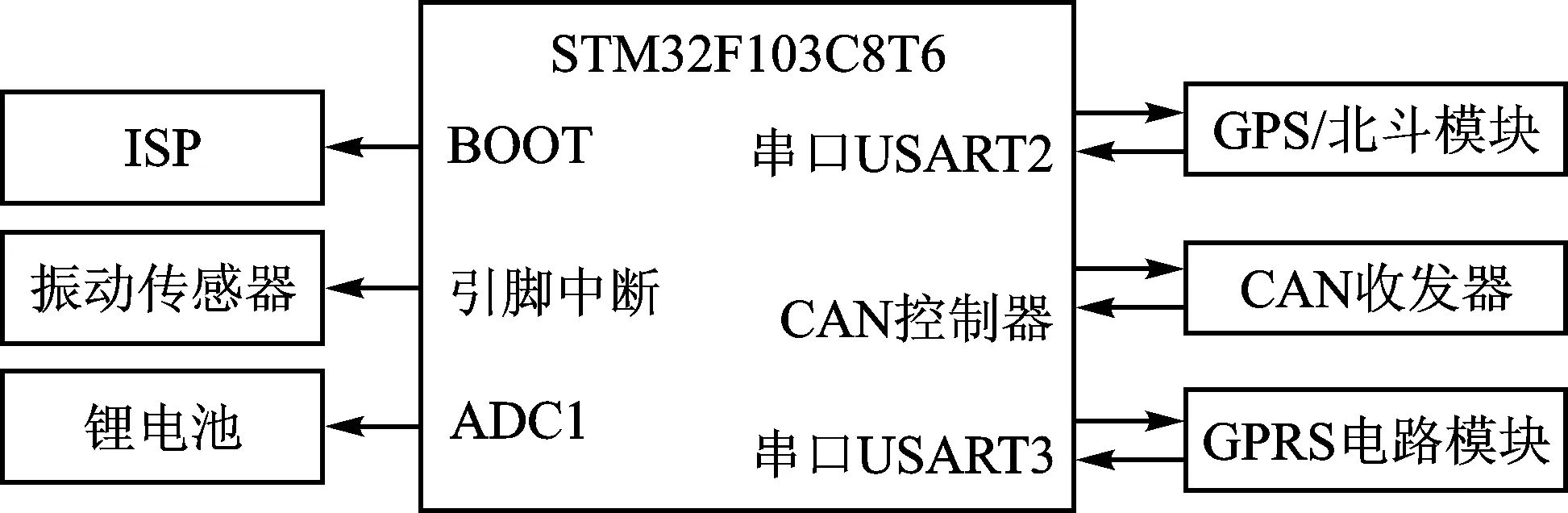
图2 CPU外围总体设计
本设计使用了STM32的两个串口,通过串口中断的方式完成所需功能。串口2与GPS/北斗模块的串口相连,车辆位置数据通过STM32串口的RX传给程序中定义的接收缓存,同时也可以通过TX发送相应命令给对其进行配置:采样频率、数据返回格式等等。串口3与GPRS模块相连,STM32通过相应AT命令与模块进行交互,完成拨号、注册网络、发送数据、接收数据的功能。
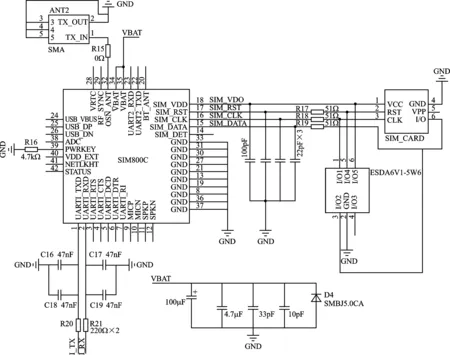
图5 GPRS模块电路图
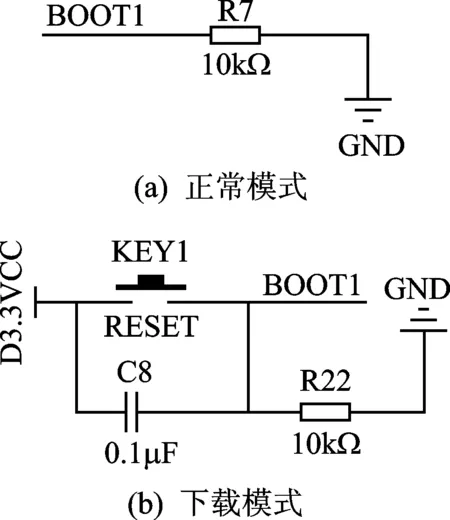
图3 处理器BOOT模式选择电路
车载终端锂电池通过电阻降压后接入STM32的PA1引脚完成内电量的采集。处理器BOOT模式选择电路如图3所示,有两种BOOT工作模式:正常模式和下载模式。默认情况下为正常模式,从闪存中启动。当按下按键之后,BOOT0电平被拉高,进入出厂下载模式。
1.2 CAN模块电路设计
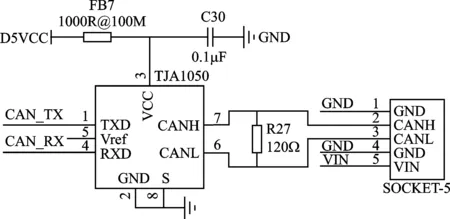
图4 CAN收发器电路图
STM32F103内置CAN控制器,外部电路只需要增加CAN收发器模块即可。本设计选用的是TJA1050高速 CAN 收发器,该收发器具有以下特点:与“ISO 11898”标准完全兼容;速度高(最高可达1 Mbps);可抗电磁干扰,不上电的节点不会对总线造成干扰;发送数据(TXD)控制超时功能,当引脚TXD由于硬件或者软件程序发生错误而一直为低电平时,“TXD控制超时”定时器电路可以防止总线持续进入这种支配状态,阻塞所有网络通信。CAN收发器电路图如图4所示。CANH和CANL之间连接一个120 Ω的电阻,进行终端电阻和电缆电阻阻抗的紧密匹配,防止数据信号被反射,提高数据传输的可靠性。
1.3 GPRS模块电路设计
GPRS模块完成数据的发送和接收,该设计采用SIM800C模块。GPRS模块电路如图5所示。该芯片性能参数如下:工作频率为GSM/GPRS 850/900/1 800/1 900 MHz;尺寸为17.6 mm×15.7 mm×2.3 mm,能够适用各种紧凑型产品设计需求;供电电压范围为3.4~4.4 V;内嵌TCP/IP协议,支持上电自启动,使用简单;在休眠模式下,耗电流低至0.6 mA,可以实现低功耗并数据信息的传输。
模块电压范围为3.4~4 V,以最大功率发射时,电流峰值瞬间可达2 A,导致VBAT上有大的电压回落,致使模块因为低电压无法正常工作。在VBAT附近使用了一个大的100 μF的钽电容进行稳压,同时并联两个4.7 μF和33 pF的陶瓷电容对高频干扰进行滤波,同时并联一个齐纳二极管防止浪涌对芯片的破坏。
1.4 GPS/北斗模块电路设计
GPS/北斗模块选择VK1612Z2M3L芯片,性能参数如下:内建LNA,低噪声放大器;定位精度<2.5 m,频率范围为GSM/GPRS 850/900/1800/1900 MHz;支持可调的刷新频率:1~10 Hz,支持定位PPS指示灯,未定位前常亮或者关闭,定位后闪烁;丰富的输出速率为9 600 bps(可选:4 800、19 200、38 400、57 600、115 200)、GPS、GLONASS、北斗、GALILEO、SBAS混合引擎;支持NMEA0183协议,可任意设置搭配输出语句——GGA、GSA、GSV、RMC、VTG、GLL。GPS/北斗模块电路图如图6所示。
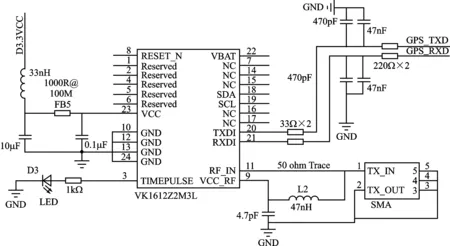
图6 GPS/北斗模块电路图
在靠近供电引脚处加入滤波电路,滤波电容靠近引脚放置,保持模块电源的供电稳定性,提高模块工作的可靠性。模块启动较慢,可在VBAT引脚处加入备用电源,使模块能够实现快速定位。
1.5 振动传感器模块电路设计
振动传感器芯片选择LM393,STM32的任意引脚都可以设置成中断引脚,该设计振动传感器的输出引脚接入CPU的PA6引脚。当发生振动时,引脚出现高低电平跳变现象,引发引脚中断,进入中断程序进行处理。振动传感器模块电路如图7所示。

图7 振动传感器模块电路图
1.6 电源模块电路设计
终端供电模式为:当存在外电的情况下,且锂电池电量低于4.2 V时,外电对电路器件进行供电,同时对锂电池进行充电;当外电消失时,锂电池进行供电。电路中需要的电压值有:STM32供电3.3 V、GPS/北斗模块3.3 V、GPS模块 3.3 V、振动传感器模块 5 V、CAN收发器 5 V。为了保证在外电断掉之后电路中仍然能够产生5V的电压,整个电源模块包含三个部分:DC-DC降压电路、充电管理电路、升压电路。DC-DC降压和充电管理电路图以及升压电路如图8、图9、图10所示。
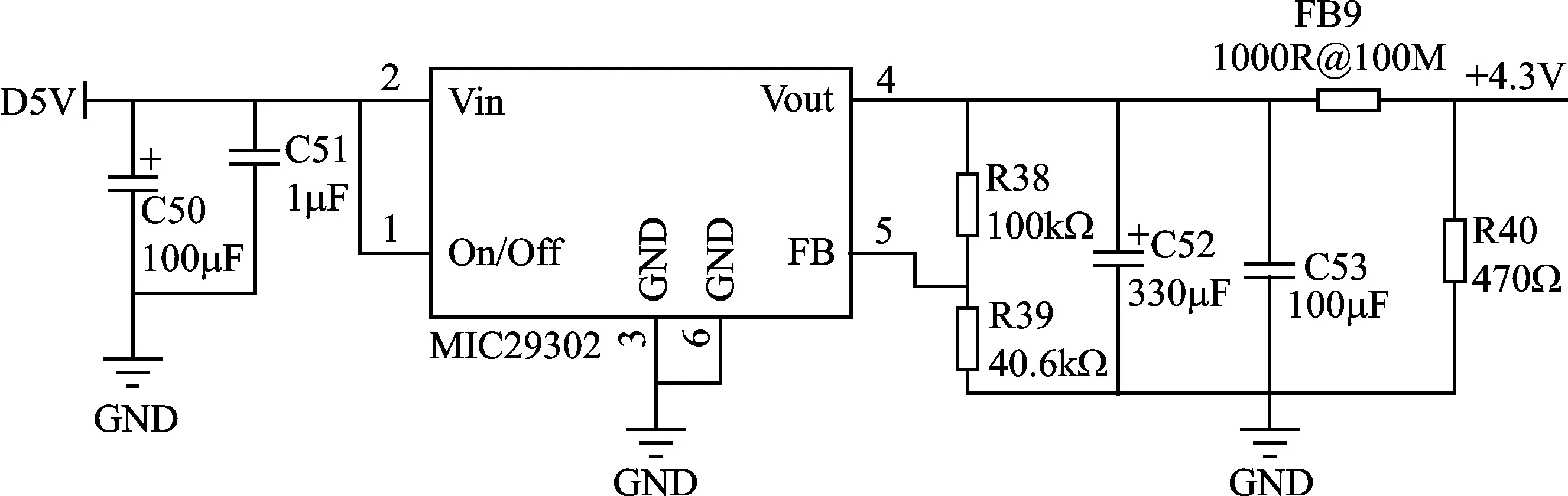
图8 降压电路图
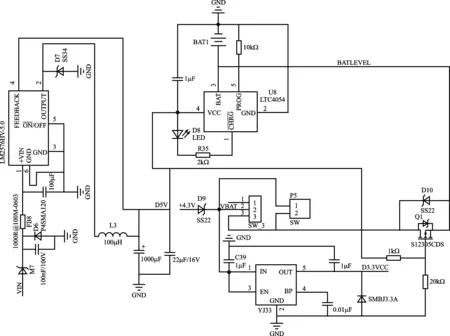
图9 充电管理电路

图10 升压电路
2 车载终端软件设计
软件整体流程图如图11所示,下面对各个部分分别进行介绍。

图11 车载终端软件总体流程图
2.1 网络注册判断与TCP连接建立
本设计中的GPS/北斗模块上电后自动进行GPRS网络附着,在发送程序之前只需要检查网络状态即可。如果已经注册网络,进行数据发送,否则重启GPRS模块。为了保证数据传输的可靠性和实时性,终端与服务器建立的是TCP长连接。检查网络与建立连接用到的AT命令如下:
检查模块是否已经附着网络:通过串口向模块发送指令AT+CGATT。模块返回数据:+CGATT:1 OK。当返回值为1的时候,表明模块已经成功附着。
建立TCP长连接指令:向模块发送 :"AT+CIPSTART="TCP","IP"," 端口号" "。返回:"CONNECT OK" 。表示成功建立连接,可以进行数据的发送。
2.2 数据提取和数据滤波
提取的数据包括车辆位置信息、通过CAN总线采集的车辆行车状态信息。采集的车辆行车状态信息如表1所列。
对于CAN总线数据,根据接收到的数据的PGN进行对应数据的提取转换,由于电磁环境的影响,数据传输过程中有可能发生突变,在这里要根据每种数据对应的范围进行滤波,去除异常数据[5]。数据范围如表1所列。
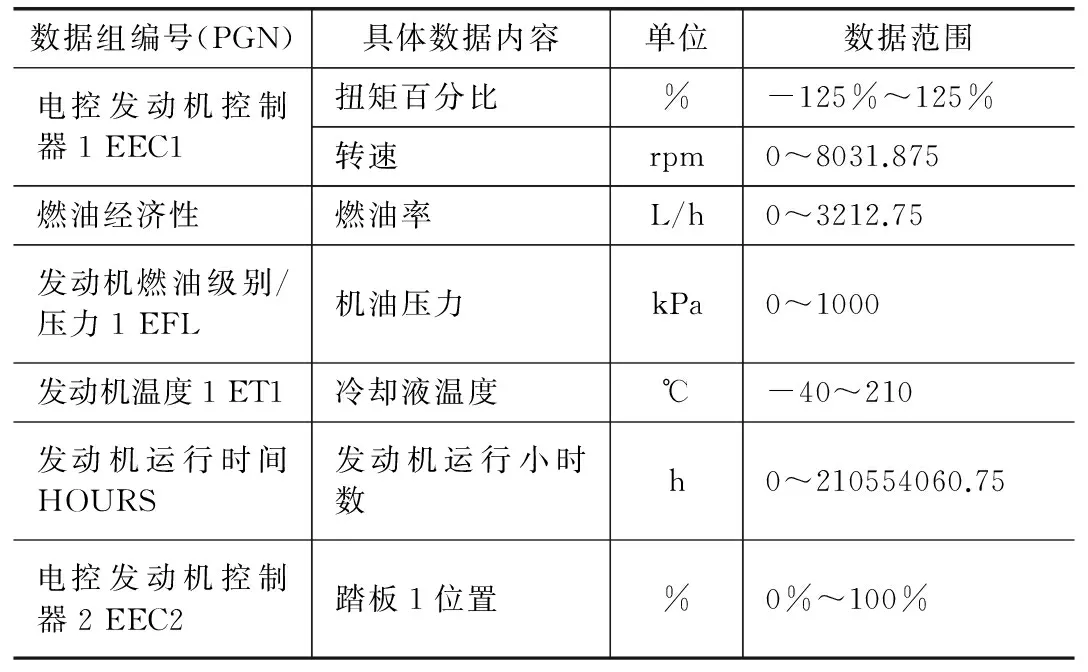
表1 车辆行车状态信息
GPS数据提取:首先根据定位标志位判断此次程序是否已经定位,然后根据NMEA协议和数据帧头格式提取需要的数据,根据终端与服务器的协议进行数据变换。由于环境的影响,定位过程中会出现漂移现象,通过比较相邻两次的经纬度数据,计算出速度值,与额定速度进行比较,如果大于上限值,认为定位出现漂移舍弃该次定位。定位流程图如图12所示。
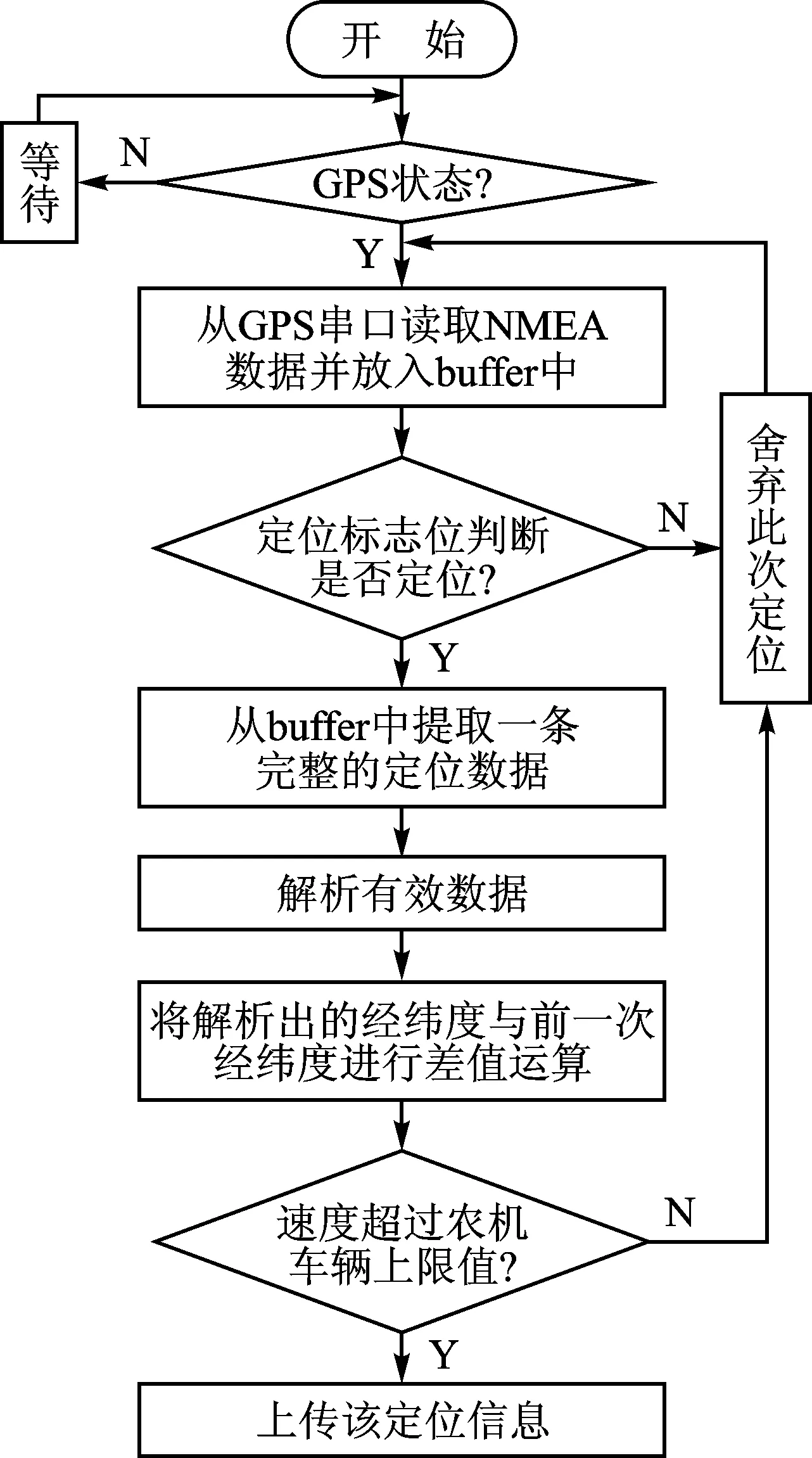
图12 GPS数据提取和数据滤波流程图
2.3 数据发送和盲区补传功能
农机车辆一般工作环境恶劣,公网设施配置较差,会经常出现某一时间段和区域没有网络信号,导致数据无法正常传输。为了避免数据丢失,在盲区将数据进行本地存储,待网络信号回复之后,上传至服务器,服务器根据数据段里的时间戳进行数据的存储。在车辆运行过程中开启屏蔽仪,一段时间后关闭屏蔽仪,在服务器上查看这段时间内车辆的历史轨迹,最后验证了使用该方法可以有效地避免数据的丢失。具体流程如图13所示。
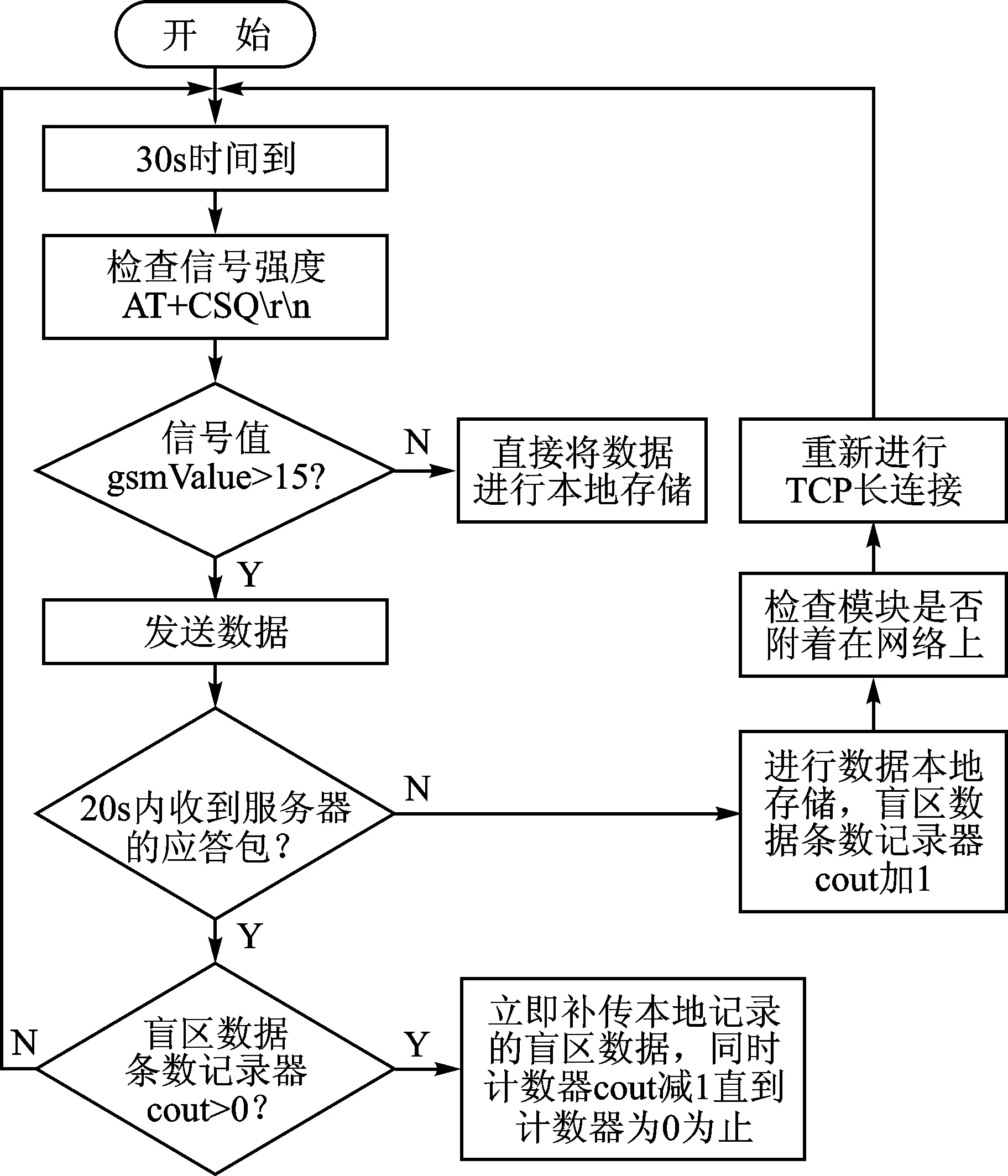
图13 数据发送和盲区补传流程图
2.4 电子围栏操作
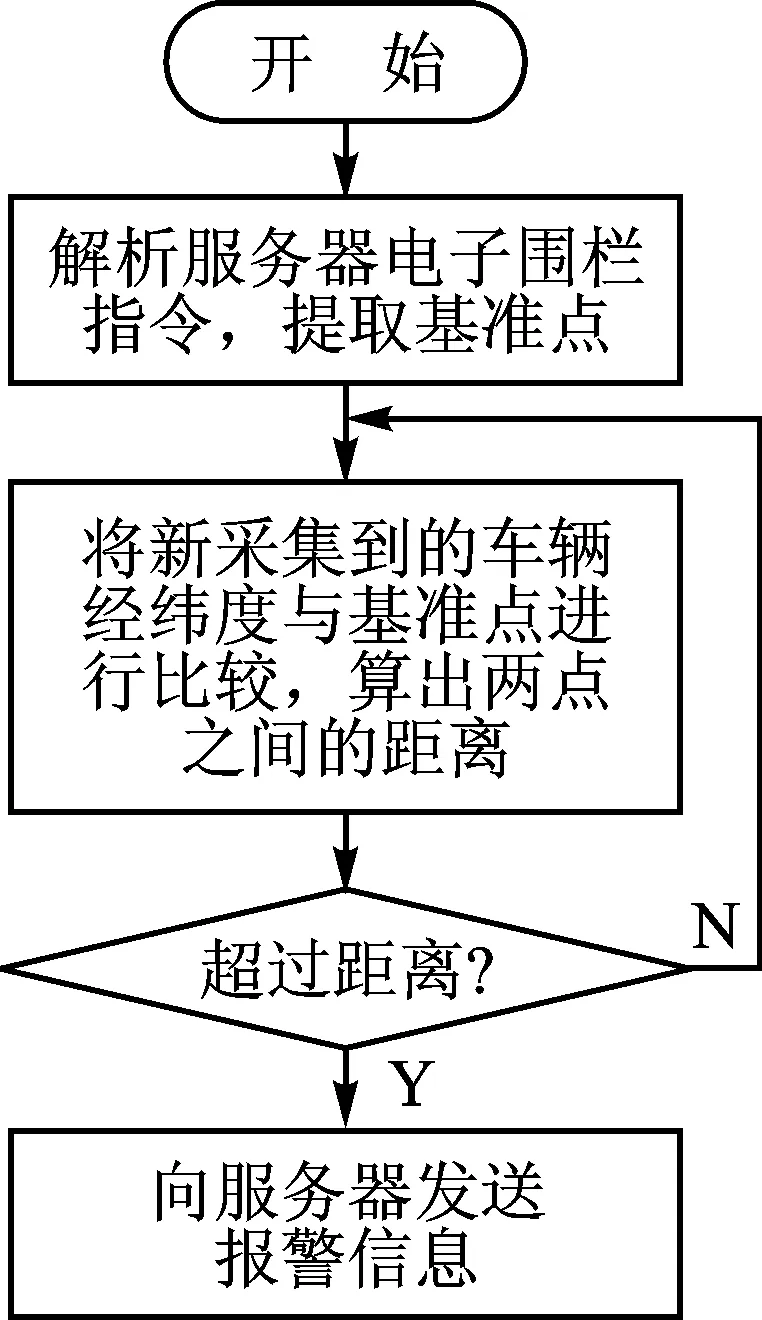
图14 电子围栏操作流程图
当车辆处于闲置状态,管理人员可以对车辆进行锁车,设置电子围栏操作,流程如图14所示。
3 终端测试结果
本文所设计的车载终端经过测试,能够准确地采集车辆信息,并且实时地上传至服务器,服务器数据显示结果如图15~17所示。
结 语

图15 车载终端定位数据显示界面

图16 车载终端行车参数显示界面

图17 车载终端控制指令发送界面图

[1] 吴瑶,张岩岩. 农机家农机租赁软件的设计构想[J]. 现代食品,2016(20):60-62.
[2] 郑柳萍,梁列全. 工程机械远程监测与故障诊断系统[J]. 工程机械,2007(7).
[3] 黄晓波,姜振军,熊树生,等. 基于GPRS的远程诊断车载终端的设计与实现[J]. 工业仪表与自动化装置,2016(1).
[4] 于文尧. 基于车联网的智能数据采集终端的研制[D].北京:中国地质大学,2016.
[5] 王新忠,王熙,王少农,等. 拖拉机CAN总线车载智能终端技术研究[J]. 农机化研究,2017(2):210-214.
卜国顺(硕士研究生),主要研究方向为车联网。
RemoteReal-timeMonitoringTerminalforAgriculturalMachinery
BuGuoshun
(College of Communication and Information Technology,University of Posts and Telecommunications of Chongqing,Chongqing 400065,China)
In the paper,a vehicle monitoring terminal for agricultural machinery filed is proposed,which takes STM32F103 as the core and uses GPS positioning technology,CAN communication technology and GPRS communication technology.The terminal can collect the vehicle status information in real-time and transmit it to the remote monitoring center through the wireless network.At the same time,it can handle the instructions from the remote monitoring center which include limiting the speed,locking the vehicle,and setting up electronic fences.It provides the data support for rapid vehicle fault location,maintenance and management.At present,the vehicle terminal has been applied in the agricultural vehicles of an agricultural machinery company in Luoyang and the operation is stable and reliable.
GPS;interrupt;STM32F103;CAN bus
TP23
A
2017-07-24)