堆肥抛撒机的研制
2017-11-21李文哲王庆庆张基因关利刚鞠文聪
李文哲,崔 亮,王庆庆,张基因,关利刚,鞠文聪
(东北农业大学工程学院,哈尔滨 150030)
堆肥抛撒机的研制
李文哲,崔 亮,王庆庆,张基因,关利刚,鞠文聪
(东北农业大学工程学院,哈尔滨 150030)
为解决堆肥机械化施肥问题,研究设计地轮驱动输肥、片式双螺旋破碎抛撒施肥装置。利用ANSYS Workbench对螺旋刀轴进行有限元模态分析,确定固有频率对螺旋刀轴影响;运用Matlab仿真地轮驱动输肥模型,分析运动阻力转矩与垂直载荷转矩关系以及地轮驱动输肥原理。应用Catia软件仿真该装置结构参数等,获得作为样机设计依据结构参数及相应运转工艺参数,制作工程样机并验证,试验过程中输肥与抛撒配合良好,达到堆肥撒施要求。研究可为适合堆肥施用特点的抛撒施肥机具研发提供借鉴。
堆肥;双螺旋;抛撒机;地轮驱动
目前我国施肥机械大多针对化肥或粒径均匀颗粒肥设计,开发堆肥施肥机械尤为必要。国外堆肥施肥机械经过近二十年发展,技术水平较高[1-2],但成本高且需要较高牵引力和大型装载机配合。国内堆肥抛撒机刚处于起步阶段,主要以引进与仿制改进为主。潘世强等研制地轮驱动式农家肥撒施机,设计地轮驱动输肥和拨肥,无需额外动力,只需牵引动力,但由于左右地轮分别经传动装置带动输肥装置和抛撒装置,在作业过程中左右地轮所受转矩不断变化,作业稳定性受影响,此外驱动装置加装在地轮外侧,机具尺寸较大[3]。
施继红等研究螺旋撒肥器抛撒性能,确定螺旋撒肥器最优转速、螺距与输肥速度[4]。上海世达尔现代农机开发有限公司研制TMS10700厩肥撒肥机,并投入生产[5];张睿等基于处方图设计链条输送式变量施肥抛撒机[6]。国内研制螺旋抛撒装置多为普通单项螺旋叶片,物料在抛撒过程中向一侧偏移,均匀性较差,对物料破碎、搅拌效果不理想;输肥装置由拖拉机动力输出轴提供动力,较大减速比才能满足输肥需要。螺旋抛撒装置和输肥装置协同工作时,保证结块和高含水率堆肥抛撒,最大限度减少动力消耗,是堆肥抛撒机械设计关键和研究热点。
针对国内堆肥抛撒机存在问题,本文研制地轮驱动片式双螺旋破碎抛撒施肥机,该机由地轮驱动输肥,可降低拖拉机动力输出轴功耗,保证载重轮转向灵活。片式双螺旋破碎抛撒装置,叶片布置均匀、旋向互为补偿,保证抛撒均匀性。叶片顶部刀齿可有效破碎结块和高含水率物料肥,增强适应性,为适合堆肥施用特点的抛撒施肥机具研发提供借鉴。
1 堆肥抛撒机械设计方案
1.1 设计要求
堆肥主要是秸秆和畜禽粪便堆制发酵而成,含有50 mm左右未降解植物纤维。长时间堆放可能结块,抛撒时需将粘结或结块肥料破碎松散,研制过程中须解决3个难点问题。① 施肥均匀性控制,确保行走速度、输肥速度和螺旋刀轴转速协调,满足耕地施用基肥要求;② 最大限度避免结块和纤维对输肥效率与螺旋刀轴切削抛撒效果影响,不能发生肥料抱轴,以及输肥机构与螺旋刀轴工作区域产生堵塞等现象;③ 保证传动机构平稳,输肥装置将肥料匀速输送到肥箱尾部,转速较慢,转矩较大,与施肥装置转速差近200倍,动力传动需平稳分配。
结合农艺耕作要求,设计条件如下:① 堆肥抛撒机采用牵引式,抛撒机行走轮要有独立半轴,在转弯时实现差速运动,作业时左右半轴和输肥轴通过控制器结合,为输肥装置提供动力。有足够类似田间地埂等非硬化道路通过能力,尽量减少轮胎接地压强,防止轮胎过度下陷,为输肥装置提供足够动力。② 螺旋抛撒装置可将粘结、结块和以纤维形式存在肥料破碎,并均匀抛撒到地面,确保无堵塞和抱轴等现象。③ 输肥装置工作时均匀稳定,并与抛撒速度协调配合,无拥塞和断料现象,确保抛撒连续性,可根据农艺要求控制施肥量。
1.2 堆肥抛撒机械组成及工作原理
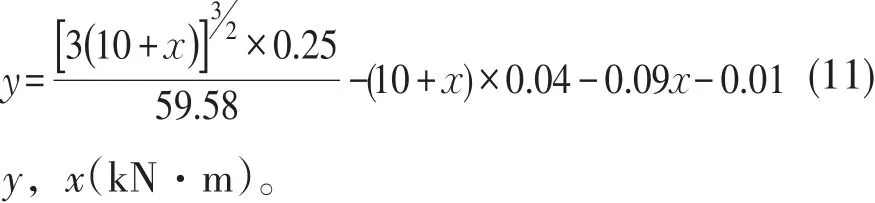
堆肥抛撒机施肥装置主要由底盘、肥箱、螺旋抛撒装置及传动装置、刮板输肥装置、地轮驱动装置、行走轮等组成,样机具体结构如图1所示。其中地轮驱动输肥装置由左右分体地轮、差速器、转动链轮、离合器、减速器、刮板输肥机构组成。
作业时由拖拉机牵引,地轮驱动输肥装置开启,将输肥动力由分动行走轮经过地轮驱动装置传递给刮板输肥装置,肥箱内肥料在刮板输肥装置作用下向后移动,配置在抛撒机上双螺旋破碎抛撒装置由拖拉机动力输出轴提供动力,将肥料边破碎边抛撒,使肥料均匀抛撒到作业区域。
1.3 传动系统设计
地轮驱动堆肥撒肥机传动系在保证输肥效果同时,随车速变化调节输肥速度,降低拖拉机动力输出轴功耗,由拨叉控制地轮输肥开关,保证左右载重轮转向灵活。抛撒机构传动系动力由拖拉机动力输出轴提供,具有结构简单,运转稳定特点。
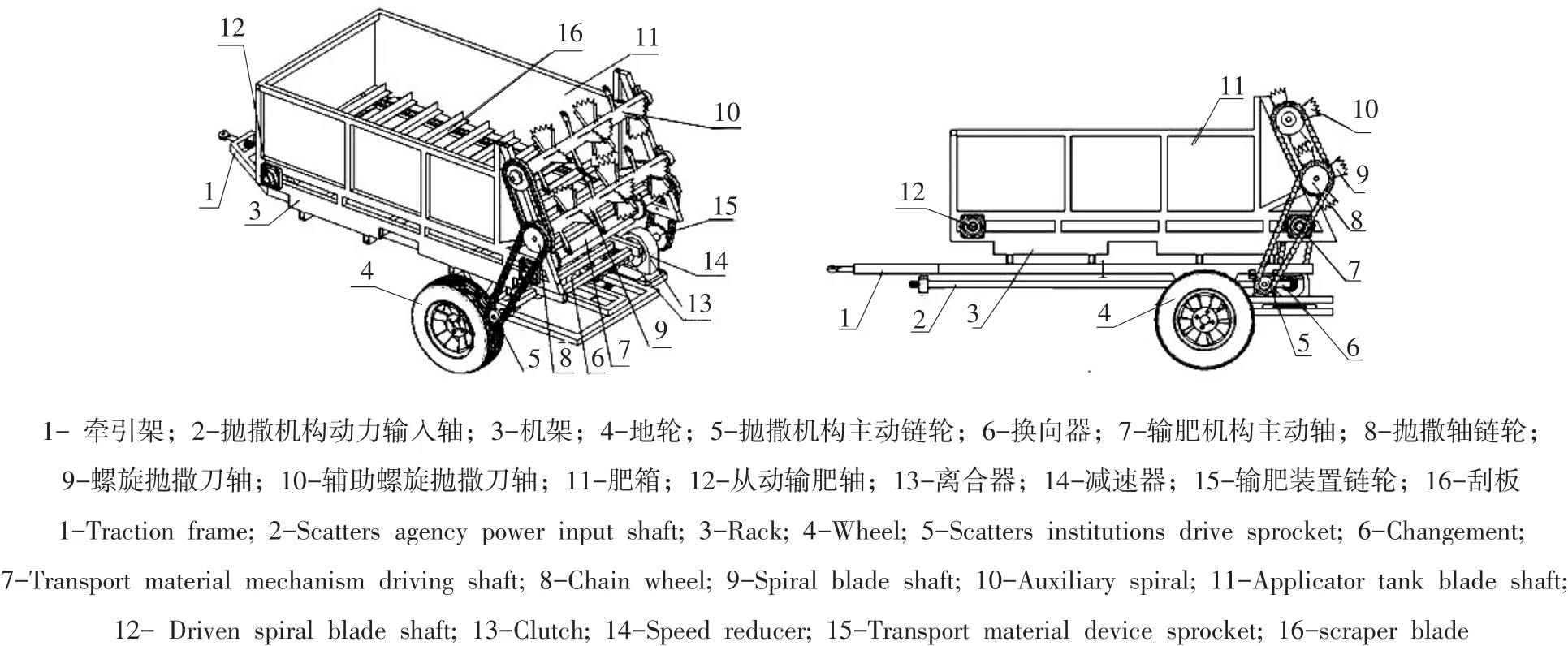
图1 施肥机具整机结构Fig.1 Structure diagram of Fertilizing machine
地轮驱动输肥机构主要功用:①将作业机械行驶阻力转化为输肥动力,输肥速度在合理范围内随作业速度变化,适应作业工况需要。②作业时输肥机构由地轮提供动力,非作业时分离离合器,实现分动。③从动地轮在转向时差速运动,使转向灵活,减少地面阻力与轮胎磨损。
地轮驱动输肥机构结构应轻巧紧凑,效率高,造价低,运行中尽可能磨损少。① 具有合适传动比,保证机械具有稳定输出转速;② 工作可靠,使用寿命长,结构简单,制造容易,维修保养方便;③ 离合操纵方便;④ 结构布置合理,无相互干扰,噪音小;⑤ 保证作业机械满负荷工况下传动部件应有足够强度。
如图2所示,输肥机构由从动地轮、后桥部分、中间链轮、摆线针轮减速机和最终传动部分组成。作业时转动从动车轮为输肥机构提供动力,动力在传递过程中经过后桥1,由后桥链轮传递给中间链轮2,离合器3控制输肥机构工作与停止,动力经由摆线针轮减速机传 递给链轮4,最终由链轮5将动力传递给输肥轴,输肥轴带动刮板输肥。数字Ⅰ、Ⅱ、Ⅲ表示传动轴。
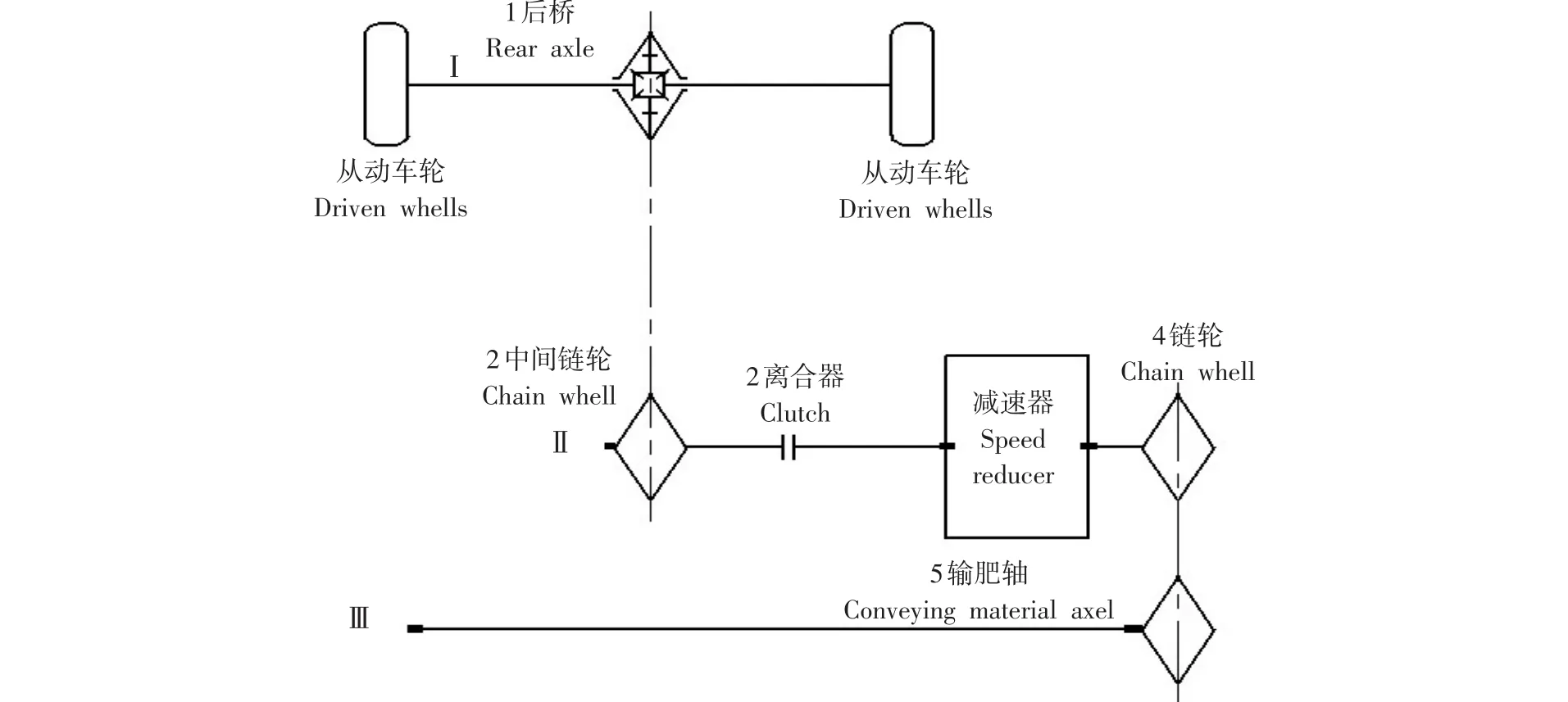
图2 输肥机构传动Fig.2 Transmission schematic of fertilizer transfer mechanism
堆肥抛撒机构主要功用:① 将作业机械输出动力转化为抛撒机构动力,适应作业工况需要。② 将动力输出方向调整为所需旋向。
对抛撒机构要求:① 具有合适传动比,保证机械具有稳定输出转速;② 工作可靠,使用寿命长,结构简单,制造容易,维修保养方便;③ 结构布置合理,无干扰,噪音小、振动小;④ 链条采用油脂润滑。⑤ 保证作业机械满负荷工况下,各传动部件有足够强度。
如图3所示,抛撒机构由动力输出轴、换向器、中间链轮和最终传动部分组成。
作业时拖拉机动力输出轴为抛撒机构提供动力,动力在传递过程中经过驱动轴,由换向器1传递给中间链轮2,最终传动链轮3带动抛撒机构抛撒堆肥。数字Ⅳ、Ⅴ、Ⅵ、Ⅶ表示传动轴。
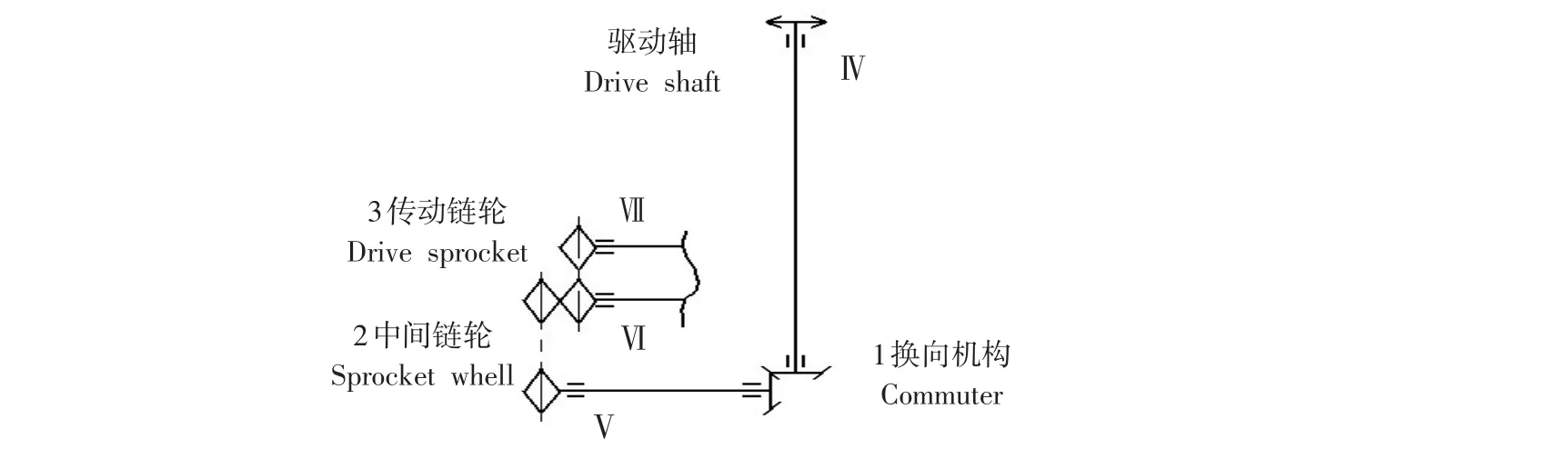
图3 抛撒机构传动Fig.3 Dispersal of an export institutions transmission
2 堆肥抛撒装置关键部件设计
2.1 螺旋抛撒装置设计
螺旋抛撒装置外形结构如图4所示,由抛撒叶片和旋转轴构成,抛撒叶片由8个右旋抛撒叶片和8个左旋抛撒叶片交错排列,焊接在旋转轴(无缝钢管)上,相对于旋转轴轴向中心对称,叶片由4 mm厚钢板制成,顶端有规则刀齿,使抛撒叶片具有良好破碎能力,叶片两侧有20 mm肋板,提高叶片强度,减小叶片作业时形变,增大叶片扫掠有效区域,交错叶片组成无重复,无遗漏螺旋搅动空间,保证在高速旋转时切削和抛撒均匀稳定。
应用CATIA软件对螺旋抛撒装置建模、装配,通过CATIA Sweep Volume扫掠体功能预览螺旋抛撒装置操作时所占空间体积,检查叶片扫掠区域,调整叶片位置,避免出现未扫掠空间,其结构如图5所示。
2.2 螺旋抛撒装置有限元分析
在施肥过程中,螺旋抛撒装置受周期性冲击载荷作用,为保证抛撒装置工作可靠性和使用寿命,基于ANSYS Workbench分析抛撒装置有限元模态。抛撒叶片与旋转轴材料参数为:弹性模量2×1011Pa,泊松比 0.3,密度 7 850 kg·m3,屈服强度 3.1×108Pa。为保证计算精度,适当增加网格划分密度,最终划分抛撒装置实体单元个数为40 302,节点个数为83 925。螺旋抛撒装置有限元网格模型如图6所示。
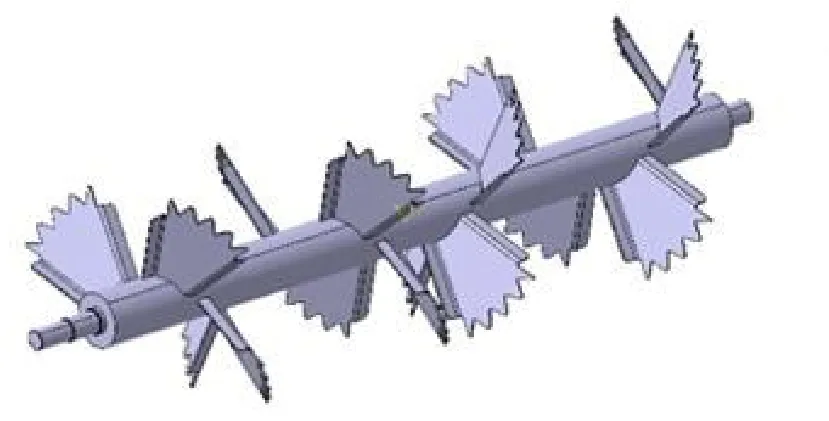
图4 螺旋刀轴结构Fig.4 Spiral blade shaft structure diagram

图5 螺旋刀轴扫掠体Fig.5 Spiral blade shaft Sweep Volume
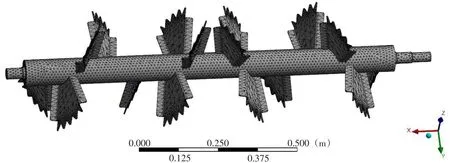
图6 螺旋刀轴有限元网格划分Fig.6 Finite element grid division of spiral knife shaft
设计螺旋刀轴转速为350~400 r·min-1,基频5.8~6.7 Hz。螺旋刀轴最低阶频率为1阶固有频率2.48 Hz,2阶固有频率117.06 Hz,随着阶数增大频率逐渐增大,小于模态分析2阶及2阶以上固有频率,无共振(见表1)。
可见对螺旋刀轴可能产生影响的是第1阶固有频率。在第1阶固有频率2.48 Hz状态下,刀轴整体为径向膨胀振型,刀轴基频大于1阶固有频率,但频率较为接近,由于螺旋刀轴启动工作转速经过第1阶固有频率所对应转速,在螺旋刀轴启动工作瞬间可能引起刀轴径向膨胀共振现象,因为是瞬间短暂共振,所以当螺旋刀轴达到工作速度稳定旋转时无共振。螺旋刀轴有限元模态分析如图7所示。
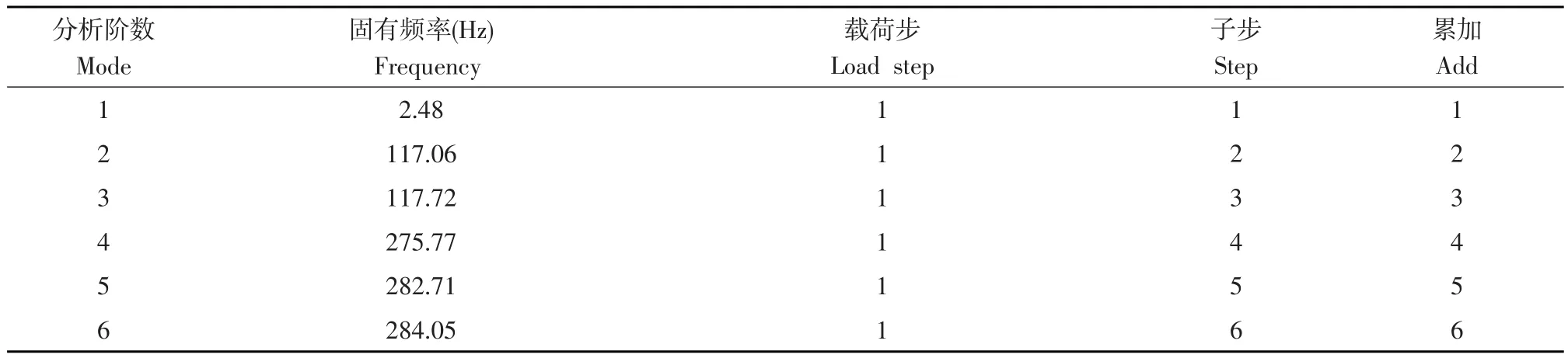
表1 螺旋刀轴模态分析结果Table1 Modal analysis results of the Spiral knife shaft
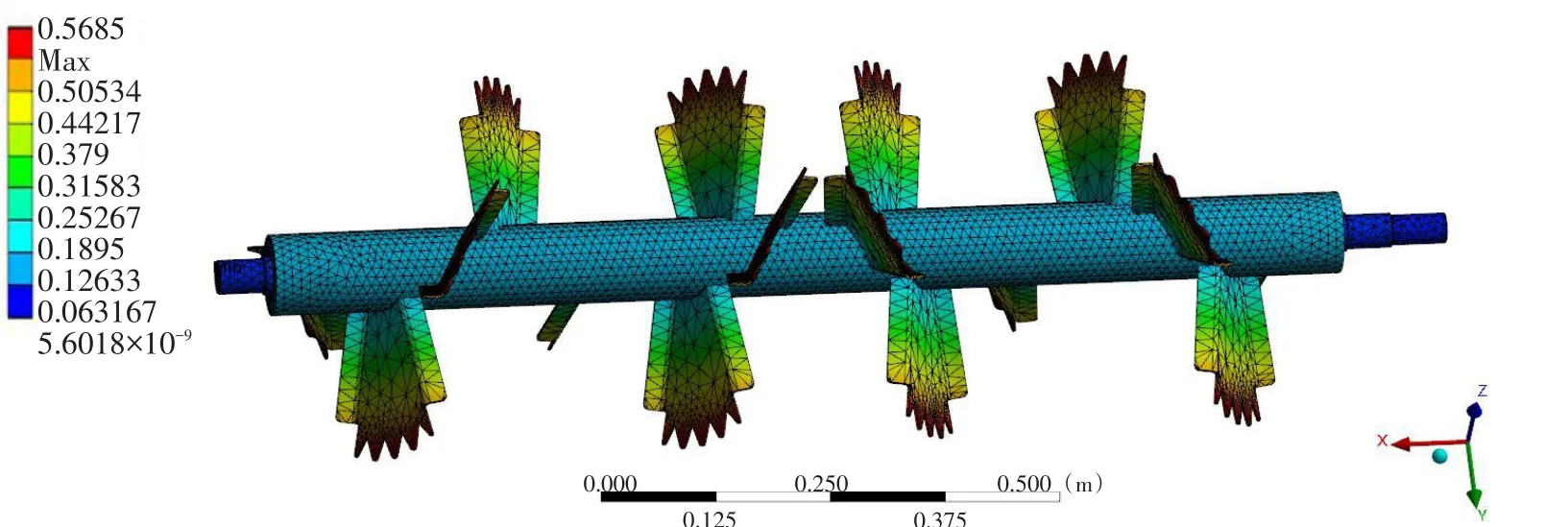
图7 螺旋刀轴1阶振型Fig.7 Spiral knife shaft 1 sketch mode
2.3 输肥机构设计
刮板输肥装置由链轮、链条和固定在链条上的刮板组成。输肥动力由行走轮经过传动装置传递给刮板输肥装置,经链轮带动链条将肥料向后输送。
行走轮提供足够输肥动力为关键因素,由于施肥量所需转速较低,转矩较大,为保证正常工作,应计算所需扭矩。参照文献[7]各参数如表2所示。
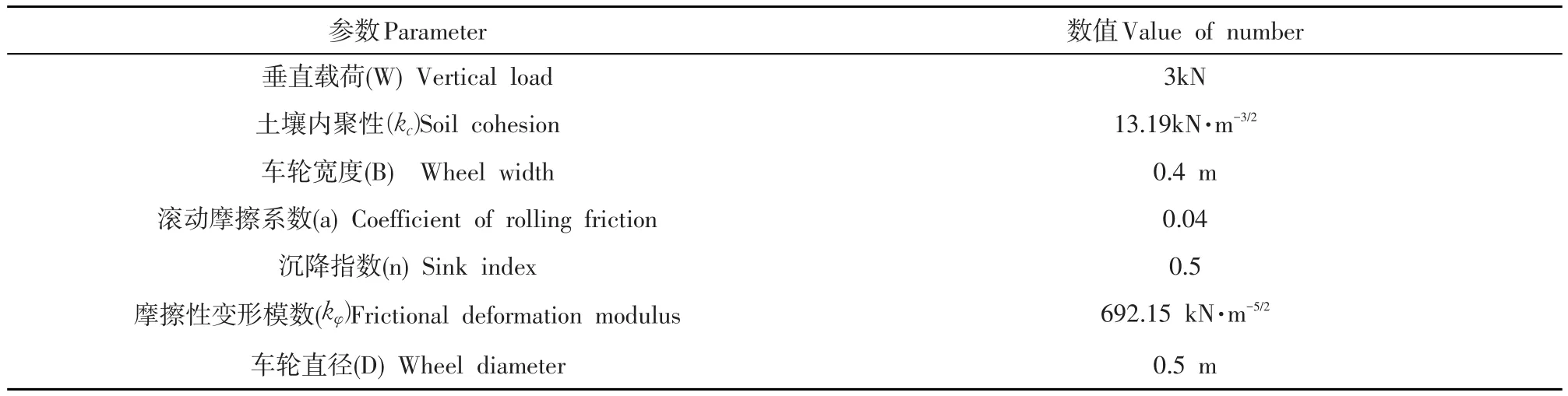
表2 输肥机构基本参数Table 2 Transfer mechanism basic parameters
输送量计算公式:

式中,Qo—计算输送量(m3 · h-1);
B—肥箱宽度(m);
H —肥箱高度(m);
v—刮板链条输送速度(m·s-1);
η—输送效率(%)。
链条张力计算公式:

式中,F—刮板链条最大张力(N);
Lo—肥箱长度(m);
g—重力加速度,取g=9.81(m · s-2);
m—刮板链条每米质量(kg·m-1);
mv—物料每米质量(kg·m-1);
f—物料内摩擦系数;
f1—物料外摩擦系数;
n—物料对肥箱两侧侧压系数;
hˊ—输送物料高度;
求得:Qo=10.8 m3·h-1; F=2 587N
输肥机构动力由承重地轮提供,承重地轮既是行走机构又是输肥机构动力来源,而输肥速度控制直接源于对作业速度控制,降低拖拉机动力输出轴功耗。从动承重地轮受地面行驶阻力发生转动,产生转矩为输肥机构提供动力。刚性轮行驶阻力为压实阻力和推土阻力,充气轮胎还要考虑轮胎反复变形阻力,取决于轮胎尺寸、结构、材料和行驶条件。假设理想状态下轮胎充气压力Pi和轮胎刚性产生压力Po之和等于临界压力Por,即轮胎行驶状态下呈刚性状态[8-9]。为预测刚性轮行走阻力,Bekker提出半经验方法[10]。承重地轮受力分析如图8所示。
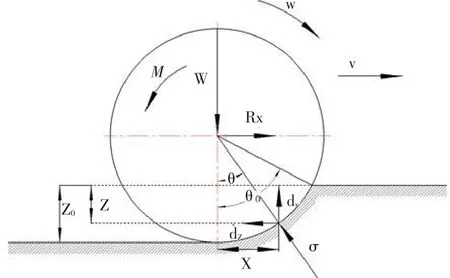
图8 承重地轮受力分析Fig.8 Bearing wheel force analysis
从动刚性轮平衡方程为:
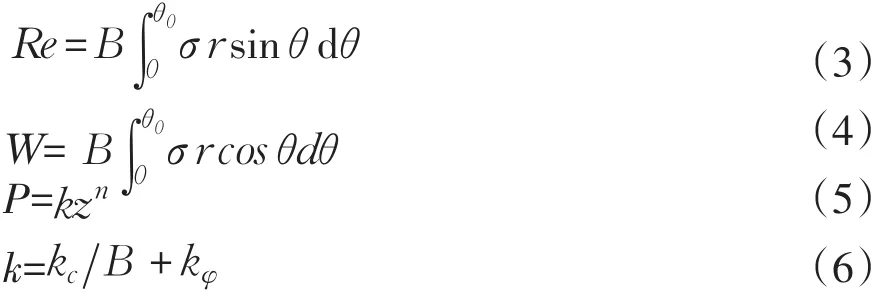
式中,Re—运动阻力,W—垂直载荷,σ—法向应力,B—车轮宽度(为两轮宽之和)。由于假定径向载荷 σ等于在相同深度 z处单位载荷P,应用方程(3~6)可得出刚性轮运动阻力方程:

式中,R—运动阻力(kN);
W—垂直载荷(kN);
n—沉降指数;
kc—土壤内聚性(kN · m-3/)2;
kφ—摩擦性变形模数(kN ·m-5/2);
B—车轮宽度(m);
D—车轮直径(m);
可见,当车轮参数和土壤参数一定情况下,车轮运动阻力R与垂直载荷W成正比。为得到满意预测结果,选取贝式仪测定含水率为38%土壤参数,并将原英制单位化为常用单位。
车轮转动平衡方程:

式中,r为轮胎转动半径,a为滚动摩擦系数,Mm克服转矩。可见运动阻力Re是决定轮胎转动重要因素,由运动阻力产生转矩Rer,Wa是堆肥抛撒机自身质量在轮子上垂直载荷和滚动摩擦系数产生转矩,Mm是驱动输肥机构转动所需转矩,必须大于Wa+Mm才能正常转动。
经计算Rer≈3 583 N ·m;Wa≈1 200 N ·m;Mm≈478 N ·m。满足Rer≥Wa+Mm,即车轮可以转动并带动满载输肥机构。堆肥抛撒机输肥是匀速过程,轮胎受垂直载荷逐渐减小,探讨轮胎垂直载荷W与运动阻力R关系,预测地轮是否有足够和稳定动力提供给出输肥机构。
利用Matlab GUI模拟刚性轮运动阻力,计算不同垂直载荷下轮胎运动阻力R,运动阻力与垂直载荷关系如图9所示,其他参数见表3。
由图9可知,当土壤参数和车轮参数一定时,在不同垂直载荷条件下,运动阻力随垂直载荷增大而增加。
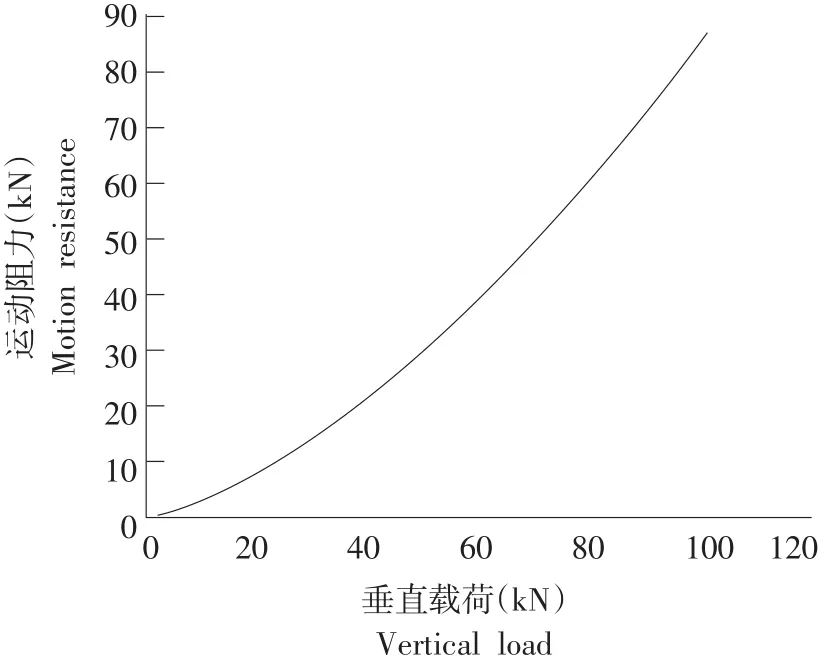
图9 运动阻力与垂直载荷关系Fig.9 Motion resistance and vertical load
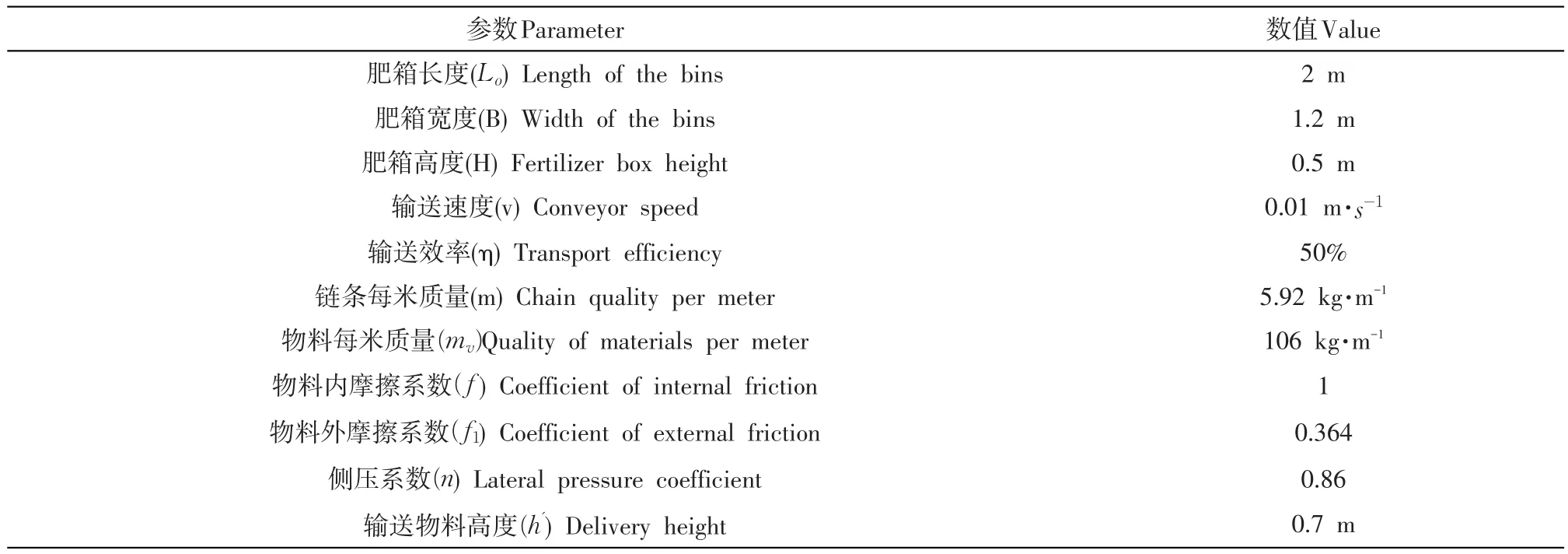
表3 输肥机构基本参数Table 3 Transfer mechanism institutions basic parameters
将刮板链条最大张力公式(2)和刚性轮运动阻力方程(10)带入车轮转动平衡方程,运用Matlab GUI模拟刚性轮转动转矩,建立运动阻力剩余转矩和垂直载荷关系如图10。
设运动阻力转矩为y,垂直载荷为x。将个参数带入方程(10)整理可得到函数:
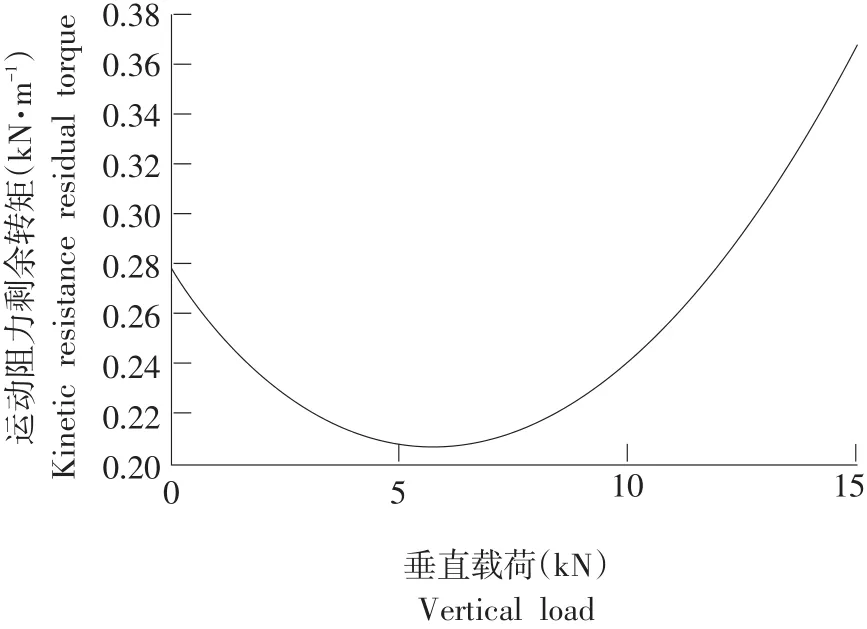
图10 运动阻力转矩与垂直载荷关系Fig.10 Motion resistance and vertical load
将垂直载荷即施肥机载肥量加大,观察运动阻力转矩与垂直载荷关系变化趋势。
由图10可知,肥箱内肥料减少,垂直载荷减小,运动阻力剩余转矩值成曲线变化,存在极小值。即在作业过程中运动阻力剩余转矩极小值>0,可满足堆肥抛撒机工作条件。
3 堆肥抛撒机总体结构
堆肥抛撒机总体结构和实物如图11所示,采用被动牵引转向作业,输肥装置和施肥装置悬挂在拖拉机后面施肥作业。肥料通装载机装载,输肥动力由行走承重地轮经过驱动装置传递给刮板输肥装置,输肥速度随作业速度改变。
样机设计堆肥容量为2 t,工作幅宽为1.2 m,作业速度为6 km·h-1,施肥机械单次最远施肥距离为280 m。
图11 堆肥抛撒机械布局结构图及实物Fig.11 Layout structure and Physical diagram of compost machinery
4 堆肥抛撒机验证试验
在东北农业大学工程学院作室外台架试验,以50 mm玉米秸秆为原料,混合沼液接种物堆肥和牛粪堆肥,密度分别为352.8和514.6 kg·m3,含水率64.21%和42.75%。
试验材料参数符合GB/T25401-2010农业机械厩肥撒施机环保要求和试验方法要求[11]。按照样机预期实现设计功能,试验参照美国ASAE(American society of agricultural engineers)S341.3中规定试验方法作堆肥抛撒机台架和田间作业试验[12],台架试验动力装置置采用三相异步电机(Y100L1-4,2.2 kW)提供动力,由变频器(SMIV-C40009BAMB)控制转速。输肥速度控制在0.01~0.02 m·s-1,螺旋抛撒轴转速控制在360~400 r·min-1,刮板间距控制在0.15~0.3 m。在距离台架0.8 m处设置2m×2m 矩形区域收集抛撒肥料,在试验区域内用线绳拉出0.1 m×0.1 m,横纵间隔为0.3 m网格,形成6行3列收集矩阵,收集每一列网格中肥料,用于数据统计。动力来源为2个3 kW电机,用变频器改变电机输出转速,模拟实际作业转速,如图12所示。选取撒施均匀度变异系数作为试验现场体现样机工作性能测试指标。观察输肥机构、螺旋抛撒机构工作运转情况。

图12 试验台架Fig.12 Testing block
撒施均匀度变异系数计算公式为
式中,CV—变异系数(%);
S—标准差;
Xˉ—绝对平均值(kg);
Xi—i列收集盒中肥料质量之和(kg);
n—收集盒列数。
试验结果表明,在刮板间距为0.15 m,抛撒机构转速375 r·min-1,输肥速度为0.02 m·s-1时,幅宽1.2 m,抛撒均匀度较好,变异系数为23.1%,达到国家标准施肥变异系数小于30%要求。
图13为堆肥抛撒机试验作业图,拖拉机为约翰迪尔280,最大牵引力为8.25 kN,大于施肥机所需牵引力1.5 kN,可正常作业。试验结果表明堆肥抛撒机地轮转向灵敏,驱动输肥连续稳定,螺旋抛撒可将结块堆肥破碎并均匀抛撒,达到预期性能。

图13 堆肥抛撒机实物Fig.13 Compost scatters machine
5 结论
a.通过ANSYS Workbench对螺旋刀轴模态分析,发现第1阶固有频率2.48 Hz对螺旋刀轴产生影响,运行稳定后影响消除。螺旋抛撒机构通过左旋和右旋交错螺旋排列叶片及其顶端刀齿可解决肥料抛撒不均匀、粉碎不彻底问题,实现肥料切削抛撒各旋向互补。
b.利用Matlab对地轮驱动输肥过程建模分析,描述作业过程中垂直载荷和运动阻力剩余转矩变化趋势,作业过程中运动阻力剩余转矩极小值>0,即堆肥抛撒机可连续正常工作,地轮驱动输肥机构输肥速度随作业速度而改变,并与装置抛撒能力有机配合,确保抛撒连续性。
[1] 施卫省,訾琨.国内外农机化施肥新技术[J].南方农机,2004(3):43-44.
[2] 李洁,吴明亮,汤远菊,等.农家肥施肥机械的研究现状与发展趋势[J].湖南农业大学学报,2013,39(1):98-100.
[3]潘世强,梁文甲,温越英,等.地轮驱动式农家肥撒施机的研制[J].吉林农业大学学报,2008,30(2):229-231.
[4] 施继红,孟宪章,潘世强,等.农家肥撒施机螺旋式撒肥器抛撒性能的试验与研究[J].吉林农业大学学报,2006,28(1):111-113.
[5]来永见,王岩,冯艳辉.介绍一种高效的农家肥施用机械-厩肥抛撒机[J].现代化农业,2014(4):50.
[6] 张睿,王秀,赵春江,等.链条输送式变量施肥抛撒机的设计与试验[J].农业工程学报,2012,28(6):20-25.
[7] 任文都,张兴辉.运输机械设计选用手册(下册)[M].北京:化学工业出版社,1999.
[8] 黄祖永,地面车辆原理[M].北京:机械工业出版社,1985.
[9] 拉贾马尼.车辆动力学控制[M].北京:机械工业出版社,2010.
[10]Bekker M G.地面车辆系统导论 [M].《地面车辆系统导论》编译组,译.北京:机械工业出版社,1978.
[11]全国农业机械标准化技术委员会.农业机械 厩肥撒施机 环保要求和试验方法(GB/T 25401-2010)[s].北京:中国标准出版社出版,2010.
[12] American Society of Agricultural and Biological Engineers.Procedure for Measuring Distribution Uniformity and Calibrating Granular Broadcast Spreaders(ASAE S341.3 FEB04)[s].USA:ASABE,2006.
Design on compost scatters machine/
LI Wenzhe,CUI Liang,WANG Qingqing,ZHANG Jiyin,GUAN Ligang,JU Wencong
(School of Engineering,Northeast Agricultural University,Harbin 150030,China)
To solve the problem of compost fertilizer mechanization,a ground wheel drive to delivery of fertilizer and vane-type double helix broken scatter fertilizer machine was designed.During the process of designing,ANSYS Workbench was used to carry on finite element modal analysis on the spiral knife shaft and confirmed the effect of inherent frequency on the spiral knife shaft.Matlab was used to make simulation experiment on the ground wheel driven spread fertilization,analyzing the relationship between the motion resistance torque and vertical load torque,also the ground wheel driven spread fertilization theory.At the same time,using Catia simulated and optimized this equipment structure parameter to gain prototype design reference's structural parameter and corresponding operation process parameters,and on this basis made the engineering prototype and done the verification test.During the test,fertilizer delivery and drip combined very well,it was satisfy the requirement of organic fertilization.It can provide a reference for the research and development of compost fertilizer application tools.
compost;double helix;scatter fertilizer machine;ground wheel drive
S224.2
A
1005-9369(2017)10-0065-10
李文哲,崔亮,王庆庆,等.堆肥抛撒机的研制[J].东北农业大学学报,2017,48(10):65-74.
Li Wenzhe,Cui Liang,Wang Qingqing,et al.Design on compost scatters machine[J].Journal of Northeast Agricultural University,2017,48(10):65-74.(in Chinese with English abstract)
2017-04-06
国家科技支撑计划(2015BAD21B00);生物燃气产业模式研究与利用示范
李文哲(1955-),男,教授,博士,博士生导师,研究方向为生物质能源与利用。E-mail:liwenzhe9@163.com
