某相控阵雷达车机动性设计*
2017-11-20陈常明李德威
陈常明,江 伟,李德威
(安徽四创电子股份有限公司, 安徽 合肥 230088)
某相控阵雷达车机动性设计*
陈常明,江 伟,李德威
(安徽四创电子股份有限公司, 安徽 合肥 230088)
某相控阵雷达具有集成度高、天线口径大、质量重等特点,其机动性设计是个难题。文中通过对天线阵面进行合理分块并选择合适的折叠方式,设计并使用一套天线自动展/收和调平的自动架设/撤收的液压系统,运用MSC·ADAMS运动分析软件对天线展/收机构进行仿真分析和优化设计,使该雷达车的机动性达到了指标要求,并已通过整机工程实施对其进行了验证。该系统可靠性高,性能优越,对类似雷达车的机动性设计具有一定的参考意义。
雷达车;机动性;自动架设/撤收;结构设计
引 言
由于现代战争的需要,地面雷达装备的机动性愈来愈受到重视。雷达机动性包括运输单元的数量,符合海、陆、空装载运输规范以及雷达异地架设和撤收的时间要求等[1-2]。风廓线雷达作为地面伴随保障装备,其机动性要求也越来越高。
目前,国内外风廓线雷达天线体制和外形尺寸各不相同,其机动性设计指标和方法也有所差别。某风廓线雷达采用的印制半波振子形式的行列馈电有源相控阵天线,尺寸为3.5 m × 3.5 m,质量约1 600 kg,机动性指标要求所有设备安装在一辆越野载车上,满足公路、铁路等多种运输方式,在八级风载荷工况下能正常工作, 2人在30 min内完成雷达系统的架设和撤收。为了满足雷达工作的各项指标,文中研制了一种新型单车集成高机动雷达。在系统设计时从运输装载性和自动架设2个方面进行了重点设计论证,以提高雷达的机动性。
1 运输装载性设计
该机动式风廓线雷达车总质量约15 t, 其布局如图1所示,工作和运输状态如图2所示。载车选用北方奔驰列装二类底盘,通过优化布局设计,将雷达天线、电子设备、自动架设系统和油机系统等布置于一个运输单元。雷达天线采用折叠式设计,即天线沿宽度方向等分为2块,运输时,一块固定于方舱的顶部,另一块折叠后依附在方舱的侧部;工作时,通过天线展开机构将折叠天线从90°(与水平面成90°)展开到0°,并与固定天线拼接成一套完整的相控阵天线。天线展开机构依附在电子方舱侧壁,调平系统布置在载车大梁两侧,油机系统设置在载车前部。在满足运输界限的条件下,尽量使电子方舱的结构尺寸最大化,以提高舱内设备的布局空间,优化人机工程。该风廓线雷达车最终实现了单车集成高机动,运输单元、运输方式和越野性能等满足机动性指标要求[3]。
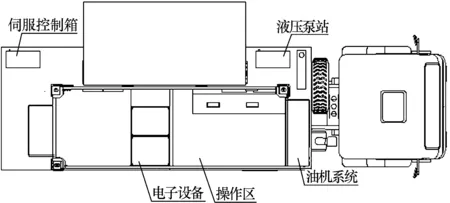
图1 雷达车布局图
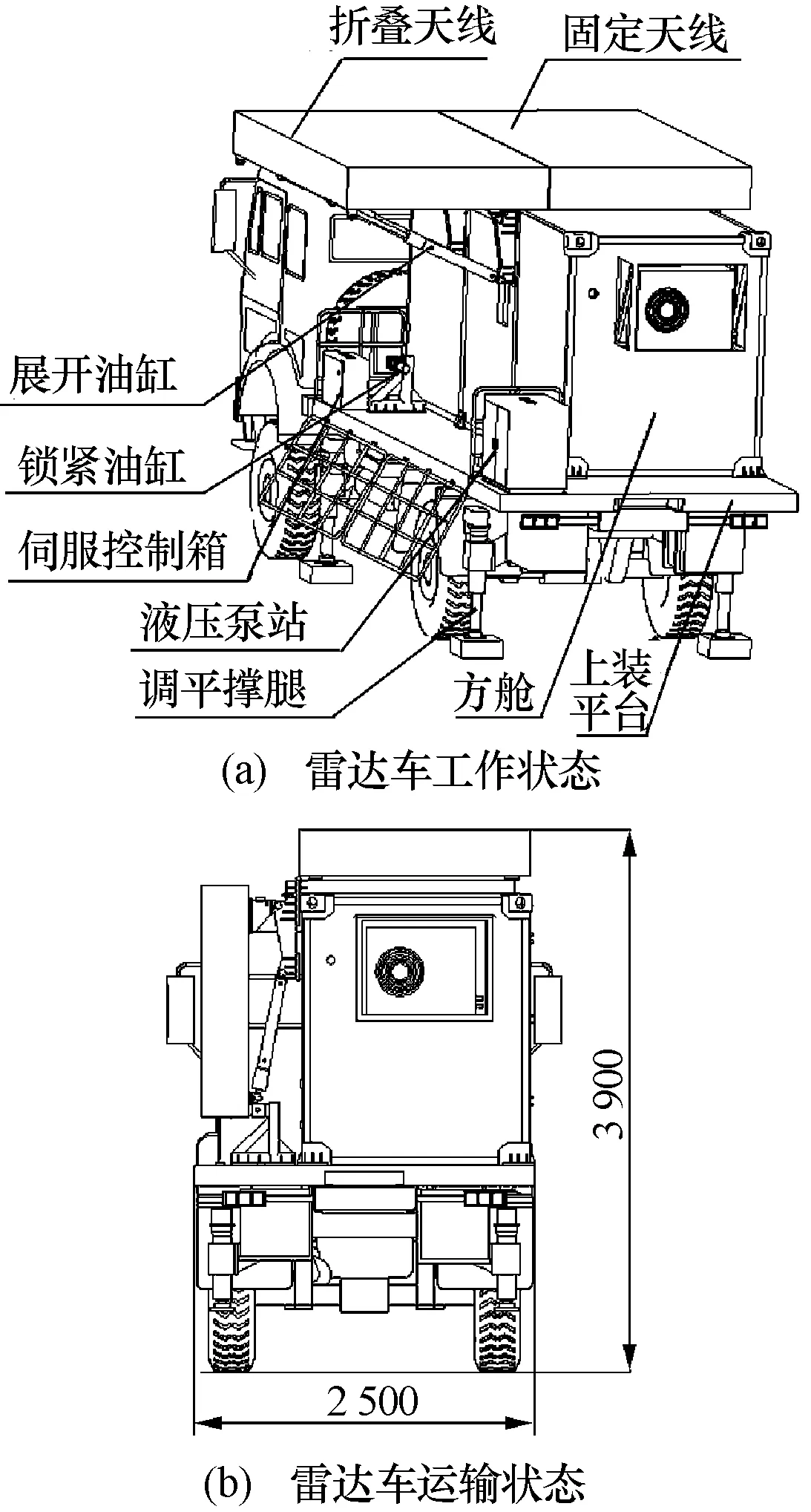
图2 雷达车工作/运输状态示意图
2 自动架设系统设计
为缩短雷达车的调平和天线展收时间,考虑执行元件的尺寸和质量,自动架设系统采用了一套全液压伺服控制系统。该系统组成与功能如下:
1)调平撑腿。4条撑腿刚性连接于载车底盘两侧的支臂上,通过设置在方舱顶部载车中轴线上的双轴倾角传感器反馈水平状态信号,控制各支腿液压马达。通过减速机驱动梯形丝杆,从而推动滑动杆的伸缩,实现雷达车的自动调平。
2)展开机构。2根展开油缸同步驱动折叠天线实现雷达的工作和运输状态姿态转换。2根插销油缸用于运输状态下的机械锁定。
3)伺服控制系统。 以可编程逻辑控制器(PLC)为核心单元发出指令,控制液压系统中的液压泵、阀和油缸等动作来完成自动架设系统的各个动作[4]。
2.2液压系统参数设计及计算
2.2.1 参数设计
根据雷达车抗风性和架设/撤收时间要求,设计调平撑腿、展开油缸和锁紧插销油缸参数, 见表1、表2和表3。
当地主要种植荔枝、柑桔、木瓜、番石榴、火龙果等经济作物。近两年,当地大力推行水肥一体化种植,这是转变农业施肥方式的一项先进农作物科学施肥技术。目前当地主推水肥一体化配套水溶肥、液体肥,很多农民都参加了培训。从今年开始,农药价格较去年同期上涨3.6%,化肥价格同比上涨7%,经销商积极性虽然提高,但仍不囤货。

表1 调平撑腿设计参数
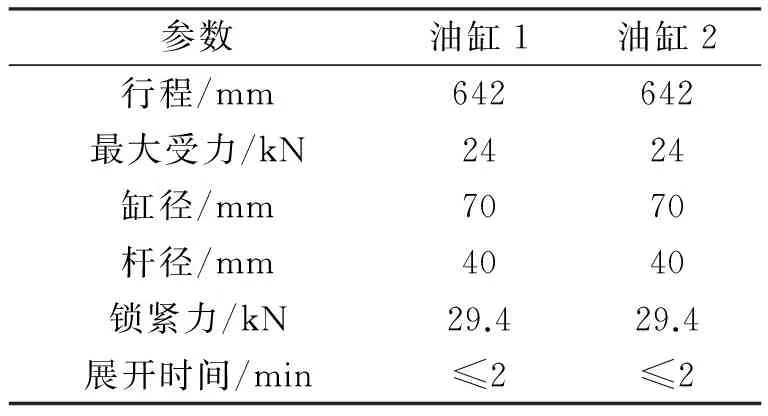
表2 展开油缸设计参数

表3 锁紧插销油缸设计参数
天线展开机构的结构设计直接影响到架设/撤收时间和系统的可靠性。本文采用运动分析软件MSC·ADAMS对机构进行了仿真分析和优化设计[5],如图3所示。仿真结果表明,在展收过程中,油缸推力变化均匀,铰点设计合理。
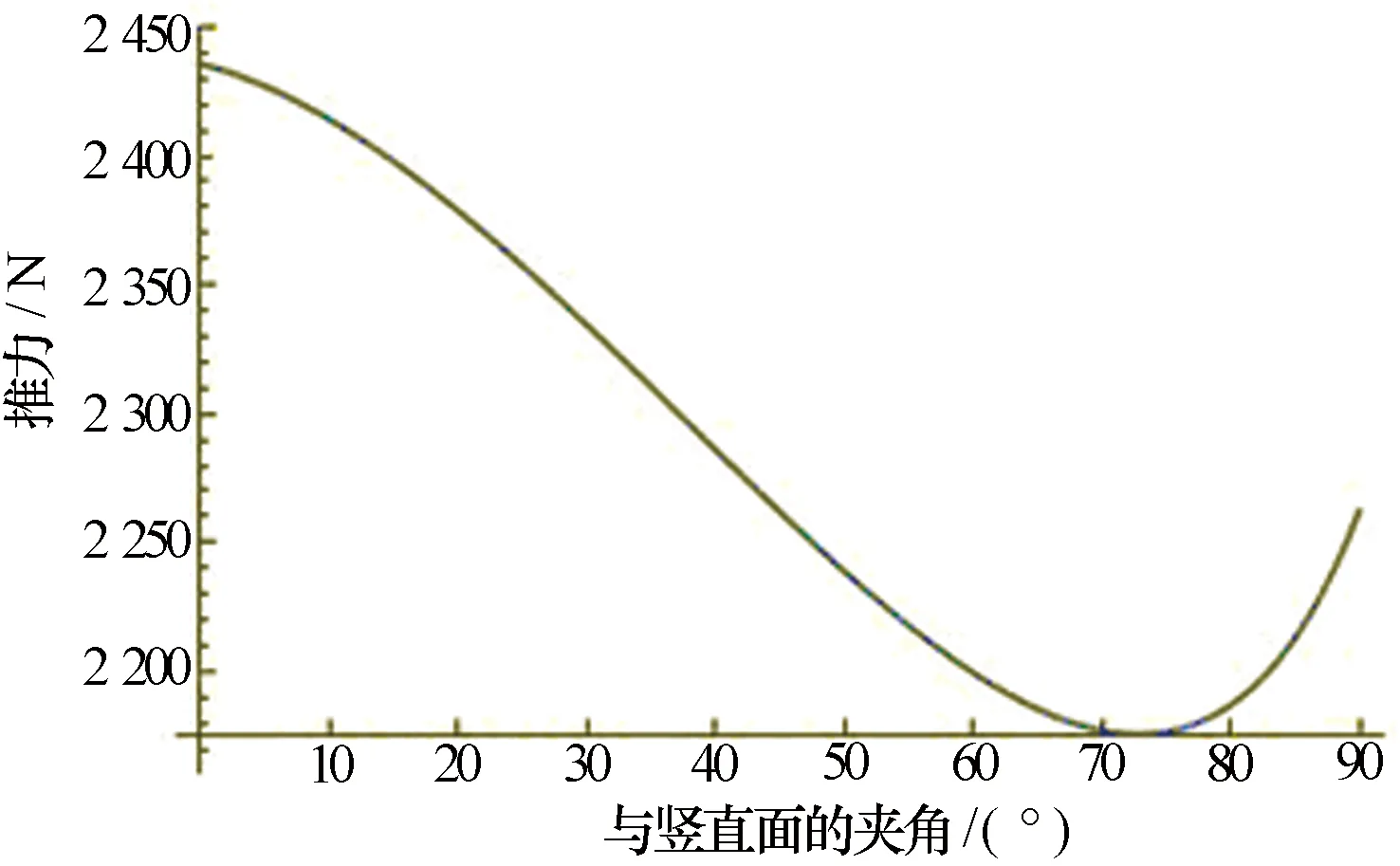
图3 仿真曲线示意图
折叠天线在展收过程中,与水平面成90°时,迎风面积最大。在八级风载荷工况下,采用有限元分析软件ANSYS进行了力学分析,等效应力和变形云图如图4所示。仿真结果表明,最大等效应力为68.8 MPa, 最大变形量为0.4 mm,即天线展开机构和天线骨架强度和刚度满足要求。
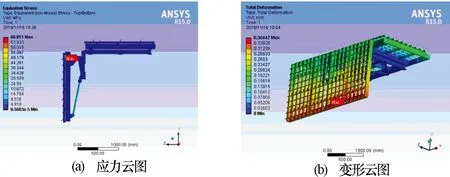
图4 力学仿真云图
2.2.2 液压系统计算
调平撑腿选用4只摆线液压马达,排量为200 mL。单个马达所需流量为:
式中:V为液压马达排量,mL;n为马达工作转速,设定为30 r/min。
4条调平撑腿所需最大流量为24 L/min。2根展开油缸所需流量为:
Q2=L/t=2.5 L/min
式中:L为油缸活塞腔总容积,dm3;t为展开时间,min。
驱动液压泵的电机功率为:
式中:N为系统功率,kW;P为液压系统额定工作压力,MPa;Q3为系统最大流量,取6 L/min;η为总效率,取0.85。
考虑系统功率冗余及泄露,电机选用功率为4 kW、同步转速为1 400 r/min的单相异步电机,液压泵选用齿轮泵,流量为28 L/min,最高压力为10 MPa。
2.3液压系统工作原理
液压系统原理图如图5所示。自动架设时,系统加电后,电机启动,带动液压双联齿轮泵工作,通过多路电液比例阀控制高压泵回路工作,带动各调平撑腿快速伸出,完成落地检测,然后启动低压泵回路进行调平,满足水平精度要求后,调平液压马达停止供油,各撑腿丝杠自锁,调平结束;切换电磁换向阀解锁运输插销油缸,然后控制电液比例阀驱动天线展开油缸完成天线展开,油缸到位机械自锁,系统架设结束。系统自动撤收过程与架设过程互逆。
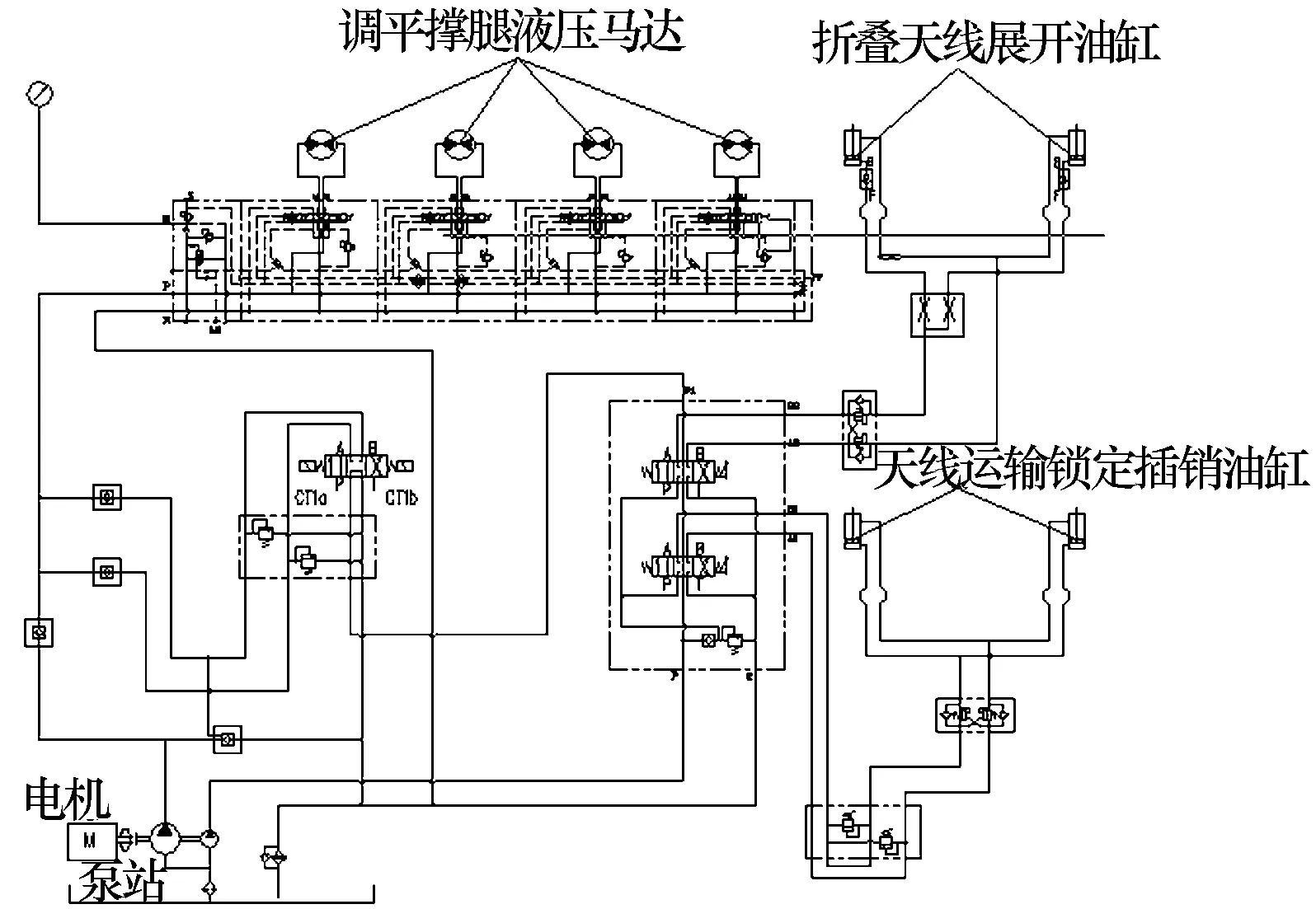
图5 液压原理图
为提高系统的安全性和可靠性,液压系统还设计了如下功能:
1)防止负载跌落功能。选取高于3倍负载压力的高压软管,在液压油缸油口位置安装防爆阀,通过流量计算与实际测试调整阀芯开度,防止其他不确定因素引发高压软管突然爆裂造成的负载跌落。
2)天线展/收到位减速功能。展开机构在展/收接近到位时需要减速以避免因惯性引起的冲击。在系统中通过接近开关发出的信号反馈给伺服系统中比例放大电路板,比例放大电路板通过控制输出电压控制电液比例换向阀减小油液供给,达到减速的目的,减小冲击载荷的影响。
2.4伺服控制系统
控制系统主要由PLC控制器、电源模块、伺服驱动器、开关、各类传感器及显示屏等组成。操作人员可通过显示屏的人机界面实现机动式雷达“一键式”自动架设/撤收。系统设计了软件互锁功能,即载车调平后天线方可展开工作。该系统的原理框图如图6所示。
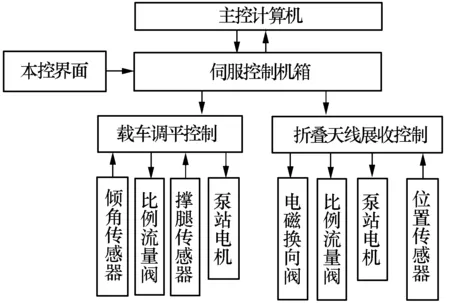
图6 伺服系统原理框图
2.4.1 自动调平
调平控制模块通过双轴倾角传感器与PLC可编程控制器配套使用。 倾角传感器可提供调平过程中平台的实时误差信号,计算机根据误差信号及时修正各撑腿的控制量。当倾角传感器的输出误差在预设精度范围内时,调平任务完成。
2.4.2 天线展收
天线展收控制模块控制2条自锁液压油缸同步驱动天线展开与折叠动作,展开到位后通过接近开关和限位块分别实现电限位和机械限位,同时油缸内部机械自锁,液压油缸可长期稳定可靠地支撑天线呈展开状态;折叠到位后也通过接近开关和限位块分别实现电限位和机械限位。同时设置了2根锁紧油缸辅助实现折叠天线折叠到位后的运输锁紧功能,液压油缸锁紧到位和解锁到位均设置了接近开关。天线展/收限位示意图如图7所示。
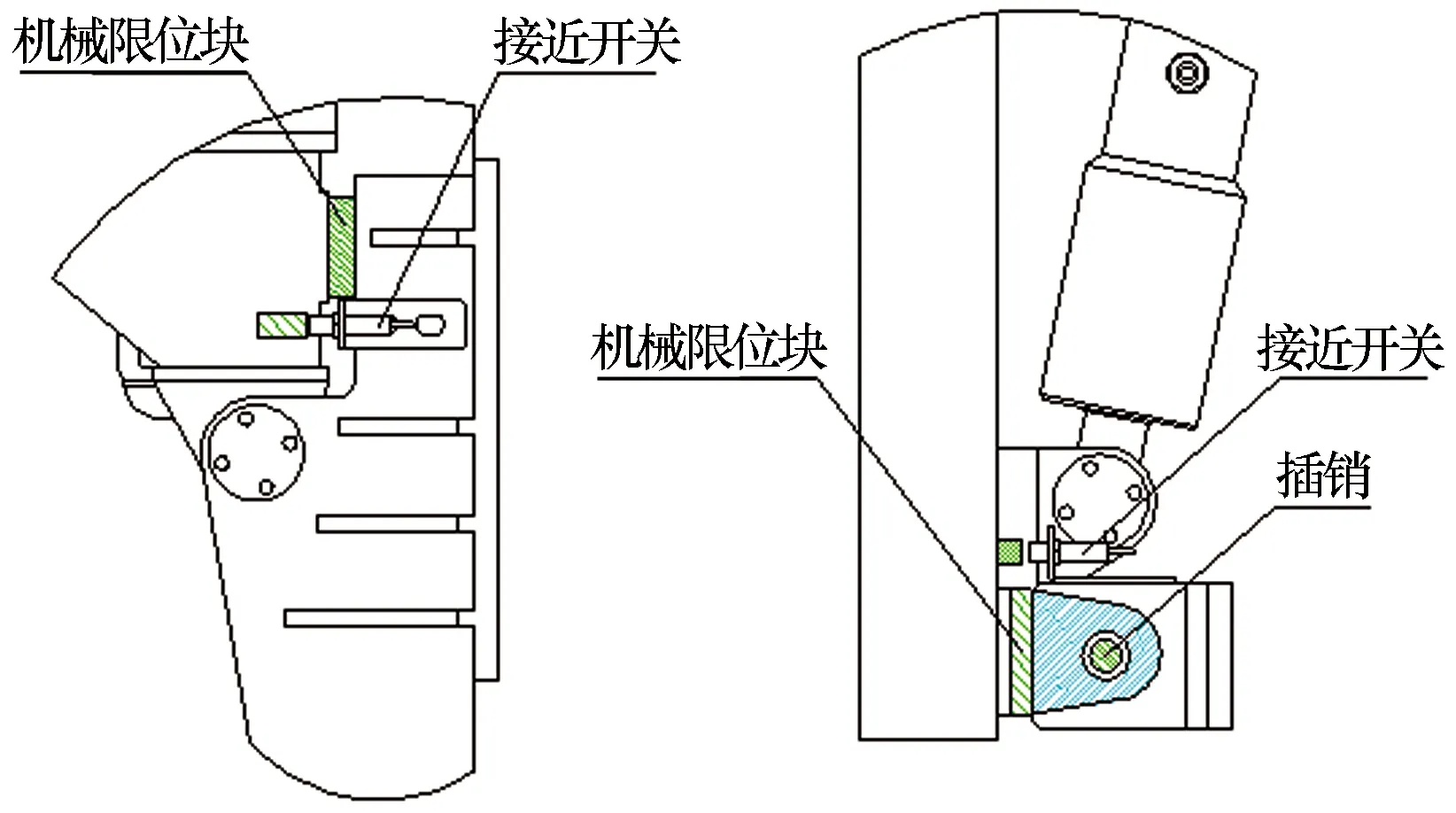
图7 天线展/收限位示意图
3 结束语
本文从运输装载性和自动架设系统2个方面进行了系统的设计论证,并通过了整机工程实施验证。在载车调平和天线展收过程中,液压系统动作协调,在八级风载荷工况下工作正常,自动架设时间为16 min(2人),实现了机动性指标要求,对类似雷达的研制工作具有一定的参考意义。在后续工作中,针对这种天线阵面大的自动架设系统,也可以考虑采用全机电自动架设系统设计。这需要在天线展开机构的绞点设计、结构形式、双缸同步与仿真分析方面进行深入研究。
[1] 岳振兴. 一种新型锁紧装置在高机动雷达中的应用[J]. 电子机械工程, 2013, 29(3): 29-32.
[2] 赵德昌. 地面高机动雷达结构总体设计探讨[J]. 电子机械工程, 2007, 23(3): 19-23.
[3] 贺鹏, 陈亚峰. 高架机动雷达总体结构设计与关键技术分析[J]. 现代雷达, 2014(3): 73-76.
[4] 夏勇, 张增太. 高机动雷达自动架撤系统的设计[J]. 现代雷达, 2006, 28(10): 25-29, 41.
[5] 周红, 樊雷. 某大型米波雷达天线车的机动性设计[J]. 电子机械工程, 2015, 31(4): 20-23.
陈常明(1984-),男,硕士,工程师,主要从事雷达结构总体设计。
MobilityDesignofaPhased-arrayRadarVehicle
CHENChang-ming,JIANGWei,LIDe-wei
(AnhuiSunCreateElectronicsCo.,Ltd.,Hefei230088,China)
The phased-array radar is characterized by high integration, big mass and the large-area antenna. Its mobility design is the difficult problem of the radar engineering. Design of a large-area antenna vehicle system is introduced in this paper, such as reasonable division and proper folding of the antenna array, the design of the automatic erecting and dismantling system of electro-hydraulic integration including the antenna deployment/folding and automatically leveling mechanism. Simulation and optimization design are carried out by MSC·ADAMS. The test result shows that the mobility of the radar meets the requirement and the designed system has the advantages of high reliability and superior performance. This design can be used as a reference for the mobility design of the similar radar vehicle.
radar vehicle; mobility; automatic erecting and dismantling; structure design
2016-12-06
TN959
A
1008-5300(2017)04-0014-04
