信号联网与地面公交优先控制车载终端改造应用研究
2017-11-17鲍俊博
鲍俊博

摘要:该文是信号联网与地面公交优先控制车载终端相关系统功能的研究,主要体现在:实现北斗+GPS伪距差分定位;实现实时生成触发判断信息;与车载终端数据接口(终端共用);数据的格式转化(共用终端不同数据格式);信号优先与智能公交系统之间数据交换共享;与公安交管平台数据接口。
关键词:信号联网;地面公交;车载终端;改造
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2017)30-0266-04
地面公交作为城市公共交通的主力,受城市交通需求总量增长及交通拥堵的影响,公交发展面临诸多问题,主要表现为运行速度不高、准点率低、舒适性差等方面,导致公交吸引力低、公交服务水平下降,严重制约城市公共交通的高效、可持续发展。因此,提高公交运行效率,提升公众出行满意度水平是南京市公共交通亟待解决的首要问题。公交信号优先作为“公交都市”建设的重要组成部分,为构筑高效率、高品质、高适应性的一体化公交都市,南京市提出实施“优化公交网络,实现公交全面提速”行动,进一步加大公交优先的发展力度,完善公交运营环境,优化公交组成结构,借助于信号联网与地面公交车载终端的监测通信,全面提升公共交通运行速度,提升公交运行效率,形成城市新的客运交通主格局。
项目借助于物联网、北斗、无线传感、信号控制技术,优化信息采集和信号控制手段,在满足社会车辆通行需求的基础上,构建地面公交优先信号控制策略,实现公交优先通行,提高公交运行速度与运行效率,构建安全、智慧、高效、环保、经济的智慧公共交通网络。
1 东总体需求
按照“技术可靠、节约高效、互联互通、信息共享、運维便捷”的原则,在满足:①智能公交调度系统稳定;②地面公交信号优先系统总体需求的前提下,采用通过对已有公交车载定位终端(南京公交集团所有,设备提供商与技术支持商为南京智慧交通科技有限公司,而非新购定位终端)改造,改造的定位终端支持多中心数据通信的总体技术方案。
2 差分北斗/GPS工作原理
2.1 差分定位原理
差分GPS(differential GPS-DGPS,DGPS)是首先利用已知精确三维坐标的差分GPS基准台,求得伪距修正量或位置修正量,再将这个修正量实时或事后发送给用户(GPS导航仪),对用户的测量数据进行修正,以提高GPS定位精度。
差分GPS (DGPS)是在正常的GPS外附加(差分)修正信号,此改正信号改善了GPS的精度。根据差分GPS基准站发送的信息方式可将差分GPS定位分为三类,即:位置差分、伪距差分和相位差分。
这三类差分方式的工作原理是相同的,即都是由基准站发送改正数,由用户站接收并对其测量结果进行改正,以获得精确的定位结果。所不同的是,发送改正数的具体内容不一样,其差分定位精度也不同。
伪距差分是目前用途最广的一种技术。几乎所有的商用差分GPS接收机均采用这种技术。国际海事无线电委员会推荐的RTCM SC-104也采用了这种技术。
在基准站上的接收机要求得它至可见卫星的距离,并将此计算出的距离与含有误差的测量值 加以比较。利用一个α-β滤波器将此差值滤波并求出其偏差。然后将所有卫星的测距误差传输给用户,用户利用此测距误差来改正测量的伪距。最后,用户利用改正后的伪距来解出本身的位置, 就可消去公共误差,提高定位精度。
2.2 差分北斗/GPS系统架构
图1 差分北斗系统架构图
差分北斗/GPS系统运作的流程:①基准站连续不间断的观测北斗/GPS的卫星信号获取该地区和该时间段的“局域精密星历”及其他改正参数,按照用户要求把静态数据打包存储并把基准站的卫星信息送往服务器上北斗/GPS软件的指定位置。②用户单元接收定位卫星传来的信号,并解算出地理位置坐标。③用户单元的数据通讯模块通过局域网从服务器的指定位置获取基准站提供的差分信息后输入用户单元的差分北斗/GPS模块进行差分解算。④用户单元在野外完成静态测量后,可以从基准站软件下载同步时间的静态数据进行基线联合解算。
北斗/GPS硬件系统总体数据流程如下图2:
图2 DGPS差分系统数据流程图
3 应用方案研究
3.1 外接模块设计
3.1.1 外接模块整体架构
外接模块由MCU主控器,4G无线通信模块,4G无线通信天线,对接通讯接口芯片及连接器,带差分功能的北斗/GPS模块组成。
图3 差分北斗/GPS外接模块硬件组成图
3.1.2 定位模组设计
本方案中选用了深圳天工测控的SKG12D芯片,带有差分北斗/GPS功能,芯片性能及规格说明如下:
SKG12D是一个完整的GNSS模块,具有高敏感性、超低功耗和小尺寸的特点而被广泛应用。SKG12D GPS模块通过天线来接收信号,使用nmea协议或自定义协议将位置、速度、时间等编成一系列的串行数据记录。
它是基于高性能的单片机架构,其—162dBm跟踪灵敏度使其能在以前的GPS模块不能定位的城市峡谷和茂盛的树荫这样的环境中定位!它的小尺寸和低功耗的特点使它很容易的被集成到便携式的设备中,例如:手机、照相机、车辆导航系统。
特点:支持多系统:GPS,GLONASS,,BDS,ALILEO,QZSS;支持广域增强系统:SBAS(WAAS,EGNOS,MSAS,GAGAN);支持99个GNSS信道;超低功耗;支持快速冷启动;超高灵敏度;内建数据记录功能;内建地磁传感功能;针对无人机的专业软件优化;支持NMEA协议和UBX协议;ISO/TS16949品质控制体系。
3.1.3 电源模组设计
外接模块采用低功耗设计,通过车载的DC24V供电的,需要在采购DC24~36V转5V及3.3V的DC/DC直流电源模块,功率为10W左右。
3.1.4 软件设计说明
软件模块分成如下主程序及子程序:1)MCU管理应用主程序。2)通讯接口收发子程序。3)4G无线模块数据收发子程序。4)GPS数据的收发子程序。5)GPS模块读写子程序。6)看门狗子程序。7)通讯接口驱动程序。8)4G模块驱动程序。
3.2 数据接口设计
参考南京市公交优先项目的《5.17公交定位信息采集分析子系统软硬件需求 (1).docx》的导航终端数据格式说明,以及基站实际可提供的数据,现确定导航终端需上传四种类型数据的前三种。
四种类型数据为:1、自定义格式数据2、GPGGA定位信息数据3、GPGSA参与定位的可见卫星信息4、伪距(单频)(注:详见以下对应说明)
以上四个报文,可以通过无线远程配置,有选择发送其中一项或几项,如关闭、打开伪距信息上传。
3.2.1 自定义格式数据
样例:$CLXX, 3206000001, 123.45678,0/99*
$CLXX,設备编号,速度,方向*
说明:(1)设备编号 设备编号为10位数字,前四位是地区编号。第五位是厂家编号,可由莱斯公司统一指定某个厂家所代表的数字,后五位按顺序编号,如3206000001)。线路编号是配在数据库里,只要一个车辆的编号就可以唯一标识车辆。可以通过设备编号在数据库中查询到车辆的车牌号及其线路。(2)速度 速度为浮点数,小数点前保留3位,小数点后保留5位,格式为###.######,例如123.45678。速度的单位为千米/小时。(3) 方向信息,99-上行,0下行(上行即主站向副站形势,下行反之)
3.2.2 GPGGA定位信息数据
例句:$GNGGA,060815.00,3956.64797000,N,11618.020770000, E,1, 06,1.26,00113,M,-006,M,,*42
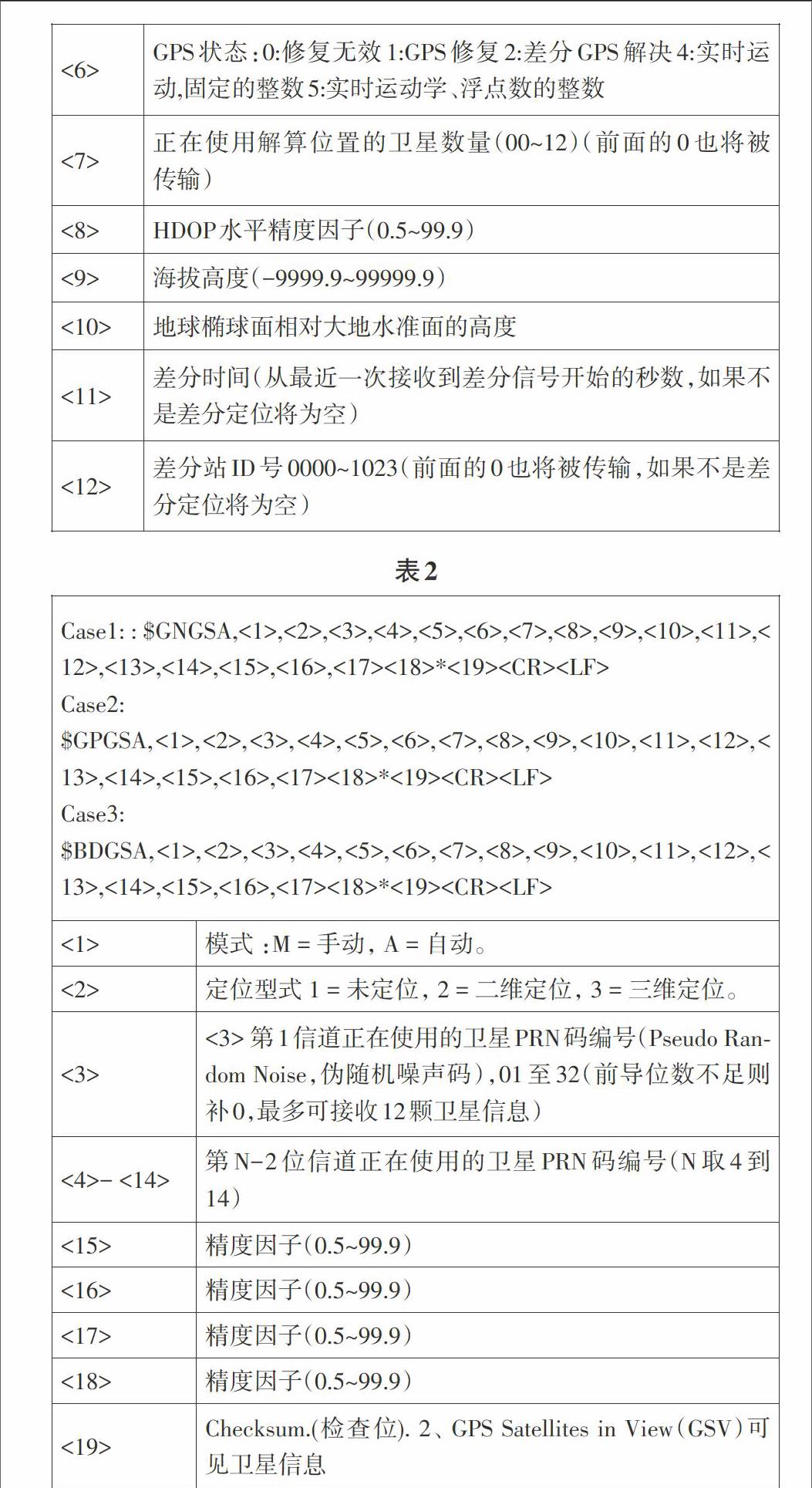
3.2.3 GPGSA参与定位的可见卫星信息
例句:
$GPGSA, A,3,14,15,05,22,18,26,,,,,,,2.1,1.2,1.7*3D 或
$BDGSA, A,3,14,15,05,22,18,26,,,,,,,2.1,1.2,1.7*3D 或
$GNGSA, A,3,14,15,05,22,18,26,,,,,,,2.1,1.2,1.7*3D
假如是GPS卫星,卫星编号不变。假如是北斗卫星,卫星编号+40。例如北斗03号卫星,编号的输出为43。
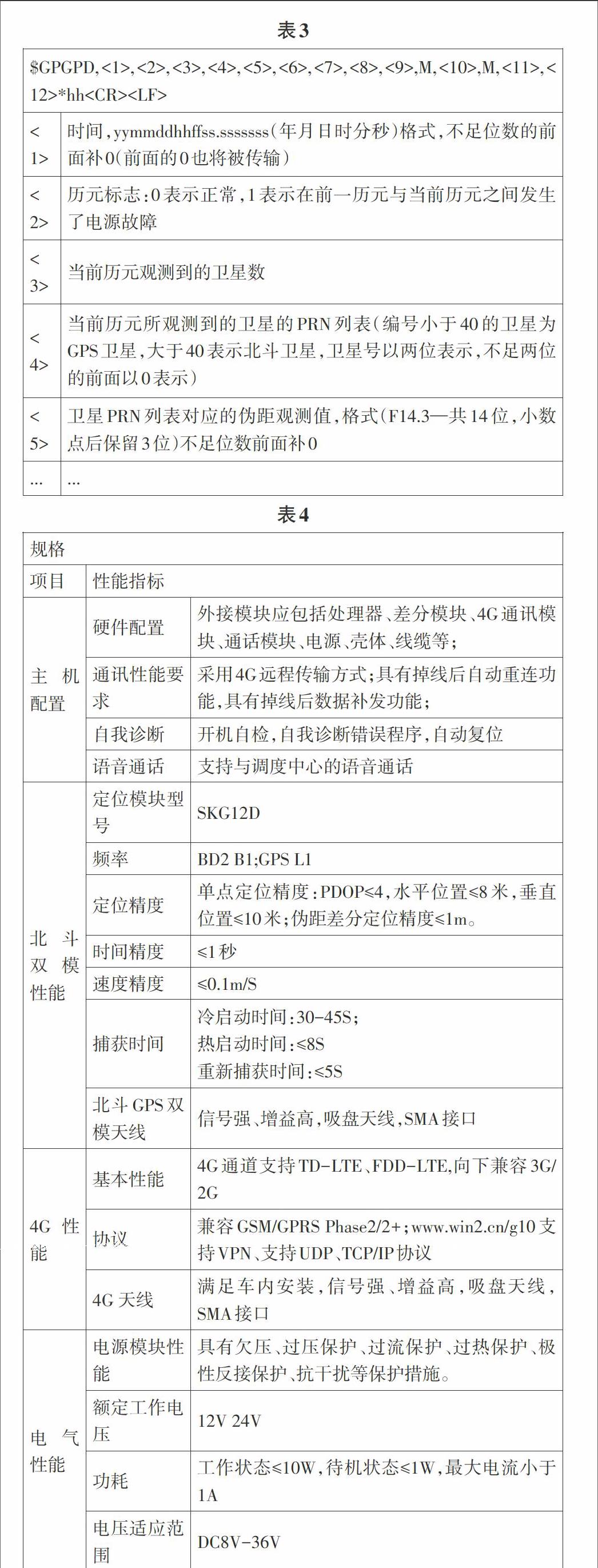
3.2.4 伪距(单频)
GPS卫星采用L1频率,北斗卫星则采用B1频率,一条数据格式示例如下:
$GPGPD,101110000000.0000000,0,09,2403130643…,23707847.969 ,20260405.820 ,20904648.086 ,21670752.102 ,21253101.992 …
3.3 车载调度终端的软件改造设计
在车载调度终端ZTM2003上,需要增加与外接模块对接的程序,设计开发内容:①RS232接口的收发程序;②RS232接口的切换程序;③ZTM2003与外接模块上的定位芯片配置程序;④ZTM2003上的2G与外接模块的4G无线通信网络切换子程序;⑤UDP通信协议的配置程序;⑥站点进出站的坐标采样修正程序;⑦语音话筒配置程序;⑧外接模块的北斗/GPS定位数据解析程序;⑨ZTM2003与外接模块的通信程序。
4 结束语
车载定位终端升级改造,将实现改造后的定位终端应用于智能公交系统与信号优先系统的稳定性可靠性;实现这两个系统4G信号传输,实现定位数据秒级传输,传输数据完整率高于95%;实现北斗与GPS双模定位,实现差分北斗/GPS定位功能,定位精度达到亚米级。
目标是:①平台对接、数据共享及互联互通(包含容灾备份数据安全);②定位终端升级改造,增加北斗/GPS双模模块,支持多中心,实现北斗/GPS差分定位,定位精度达到亚米级;实现差分定位,获取车辆的准确行驶位置,精确计算出车辆到达和驶离路口的准确时间,为信号灯调整信号配时提供基本参数。③4G通信改造,实现秒级传输频率、多中心通信及数据完好率95%以上。
