Integrity enhancement of GNSS for train positioning
2017-11-17CHENGuangwuWANGDiLIUShedeLIPeng
CHEN Guang-wu, WANG Di, LIU She-de, LI Peng
(1. Automatic Control Research Institute, Lanzhou Jiaotong University, Lanzhou 730070, China;2. Gansu Provincial Key Laboratory of Traffic Information Engineering and Control, Lanzhou 730070, China)
Integrity enhancement of GNSS for train positioning
CHEN Guang-wu1,2, WANG Di1,2, LIU She-de1,2, LI Peng1,2
(1. Automatic Control Research Institute, Lanzhou Jiaotong University, Lanzhou 730070, China;2. Gansu Provincial Key Laboratory of Traffic Information Engineering and Control, Lanzhou 730070, China)
The global navigation satellite systems (GNSS) can be applied in railway field to provide real-time location information for the train running control system, which requires that the train localization function comply with certain safety standards. Therefore, it is important to improve the integrity of GNSS to ensure the safety of train location information. First, some principles of train localization are compared for the understanding the proposed solutions. Second, a new method for improving the integrity monitoring of GNSS in train positioning is described, which compromises the Dempster-Shafer (D-S) evidence theory with the train track satellites database. The D-S evidence theory is applied to the information processing of satellite navigation message, and the train location information was predicted by satellite ephemeris information. Finally, the integrity monitoring of the proposed method is experimentally examined and verified by simulations. The comparison with the traditional RAIM algorithm shows that this method greatly improves the integrity of the GNSS, and can provide some references for satellite-based railway applications.
GNSS; train positioning; signal integrity; D-S evidence; train track satellite database
Global Navigation Satellite Systems (GNSS) have been widely used in surface transportation, for example,vehicle navigation, railway fleet management, and train station passenger information[1]. In recent years, the positioning technologies based on satellite navigation are gradually introduced in the railway field. Using satellite navigation system to realize the train localization function can reduce the track equipment. In addition, Doppler radar and odometer can be used together to deliver more accurate and safe train locations. These sensors are installed on the train instead of along the track, which reduce the system construction and decrease the maintenance work along the track. It is known that GNSS receiver is not able to provide a safe navigation solution,particularly in urban and forest area where GNSS signals are subject to multipath effects[2]. Integrity is the core factor to determine the safety of train positioning, which describes the ability to issue an alarm when the positionning error exceeds a predetermined limit value and the desired function is not available[3]. Therefore, it is important to improve the integrity of GNSS to ensure the safety of train location information. Researchers have been doing GNSS for railway safe-related applications. Debiao et al analyzed the GNSS performance and established a stochastic Petri net to illustrate the GNSS receiver location states,but the protection level pertaining to safety critical application is not discussed in detail. Neri et al analyzed the real raw GNSS data and integrity issue for railway application, but the amount of raw data is relatively small[4].
In this study, we analyzed traditional localization systems such as track circuit, odometer and Doppler radar in railway safe-related applications. A new method to enhance the integrity of GNSS was proposed. On the one hand, the information pseudo-range residual, the distribution shape and the number of visible satellites from navigation message were fused by Dempster-Shafer(D-S) evidence theory. On the other hand, the message from train track satellite database such as number of visible satellites and distribution shape were fused by D-S evidence theory. Finally the threshold was calculated by probability of fault alarm.
1 Principles of train localization
Before presenting our method to evaluate the safety of a satellite-based localization system and the proposed integrity monitoring algorithm, some concepts must be explained for the understanding of the proposed solutions.
1.1 Positioning system for track circuit
The track circuit, as a traditional positioning method,uses two rails as conductors, and we can train the train by testing the track occupancy of the train segment. The circuit provides the power and constitutes the electrical equipment, as shown in Figure 1.
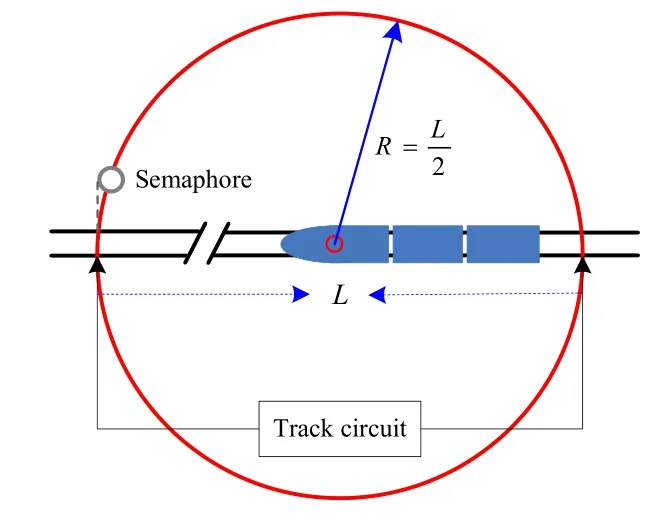
Fig.1 Railway track circuit
Track circuit can only locate approximate location of the train in sections, and it cannot get the specific location information. In Figure 1, L is the length of the section. At this time, the positioning error of the train is the circle area of the radiusR=L2. This positioning method needs to install a number of track equipments and maintain regularly, while also has a large error. Therefore,this method cannot meet the needs of train positioning.
1.2 Positioning system for odometer
An odometer is a device fitted on train bogie axles,which provides the distance travelled by a vehicle. Classically, it is composed of an incremental encoder, which measures elementary motions of the vehicle in the form of impulses[5]. Figure 2 is the positioning principle of the odometer.

Fig.2 The principle of odometer
The system can process the odometer’s output information in real time and get the location information of the train. A dead reckoning process using the position information of the odometer will be converted into pulse train distance information. Sometimes, however, the wheel may slip and wear, which may cause a lot of errors in positioning. To make matters worse, the location error will continue to accumulate, as shown in Figure 3.

Fig.3 Cumulative errors in a railway context
1.3 Positioning system for Doppler radar
Doppler radar velocity measurement is a direct method to measure the speed of the train. It can get the actual speed of the train, which doesn’t need to measure the rotation speed of the wheel. The train is placed at the bottom of radar to emit electromagnetic waves when the train is running. Due to the relative motion between the train and the rail surface, we can calculate the running speed of the train according to the Doppler frequency shift effect principle. But its precision is influenced by the algorithm and device, so it is also difficult to meet the needs of railway positioning.
1.4 Satellite localization system
With the continuous development of satellite positionning technology, satellite positioning service has begun to be applied into the railway field, which has an important impact on the way of train positioning. At present, the main GNSS includes the United States’ GPS,Russia’s GLONASS, Europe’s Galileo, as well as China’s Compass. A GNSS provides a global positioning service which is not limited to a given area. By allowing the reduction of the number of balises along the track, the satellite technology can contribute to reducing the costs of the infrastructure and enhancing the performances of the ETCS odometry in new trains without impacting on equipped lines[6]. The principle of GNSS-based train localization is shown in Figure 4.

Fig.4 Principle of GNSS-based localization
GNSS positioning is based on the distance between the user and the visible satellite in the sky. The pseudo range can express as:


This distance is unknown for GNSS user. The GNSS location information can be obtained from the satellite ephemeris. We need to determine the 4 unknowns, which include three position coordinates x, y, zand clock offset. Therefore, four pseudo-ranges are needed at least.
Although GNSS can improve the positioning accuracy of the train and realize the autonomous positioning,the positioning accuracy is affected by many factors, for example, satellite clock error, ionospheric delay, tropospheric delay, multipath error, etc. In order to meet the safety requirements of the railway, the primary problem of the GNSS application in the railway field is to solve the integrity.
2 Train GNSS integrity monitoring method
This subsection is intended to explain our proposed integrity monitoring method through compromise the D-S evidence theory with train track satellites database.Figure 5 shows the proposed integrity monitoring method.
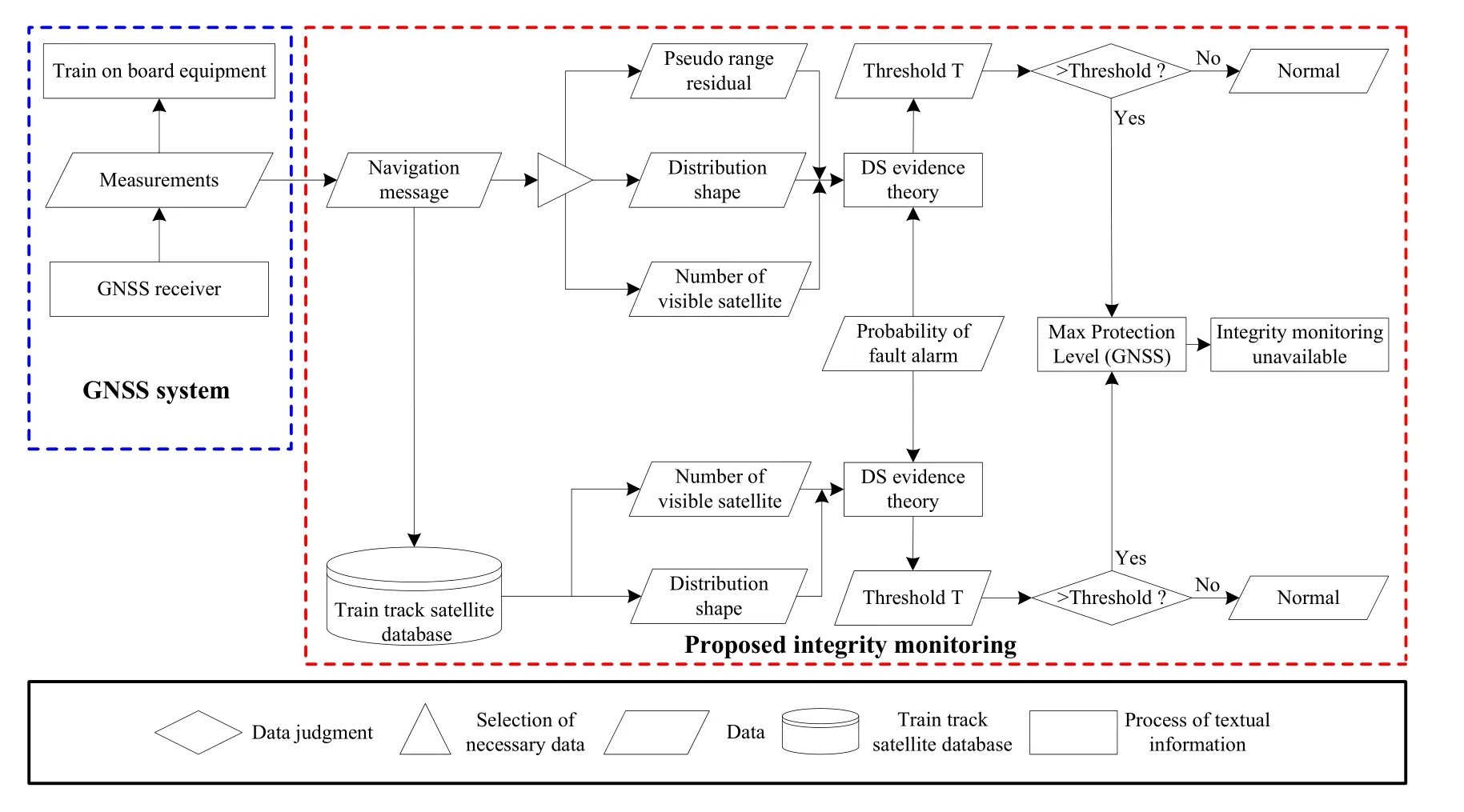
Fig.5 The proposed integrity monitoring method
There are two parts: GNSS system and integrity monitoring. Data collection and transmission are completed by GNSS system. The integrity monitoring method is mainly divided into the following three steps:
① Extract the pseudo-range residual, the distribution shape and the number of visible satellites through the navigation message. The pseudo-range residual can measure the volatility of the positioning data. Distribution shape is measured by HDOP value. HDOP is the horizontal dilution of precision. Each GNSS location contains an index of accuracy measurement information, i.e. HDDP.is regarded as the threshold for satellite geometry availability[7]. The number of visible satellites is another parameter to measure the level of positioning. In general, the positioning function can be achieved when the number of available satellites is four at least. The D-S evidence theory integrates the parameters of the pseudorange residual, the distribution shape and the number of visible satellites. The threshold T can be gotten by the probability of fault alarm.
② Set up train track satellite databases. The number of visible satellites and the distribution shape will be predicted through database information when the train passes through a position. The D-S evidence theory will be extracted to form the effective integration of the three parameters, and the threshold T can be gotten by the probability of fault alarm.
③ The threshold can be achieved through the two steps before the security fault alarm for reducing the error alarm and improving the integrity of GNSS positioning.
2.1 Principle of integrity monitoring
Even if there is no fault satellite, the environmental noise may also cause abnormal observation data, which may lead to the existence of the fault satellite’s false or miss detection. According to the definition of the measurement model of the total least squares (TLS) residual method, the total least squares method can be obtained[8]:
The pseudo-range residual vectorand the pseudo-range residual square sum of error (SSE)are respectively:
Fault detection algorithm usually uses fixed false alarm rateto adjust the detection threshold. Under the normal condition of the system, the individual components of the pseudo-range residual vectorare mutually from the normal distribution random errors.According to statistical theory, no fault hasa fault has

In the absence of failure, the system should be in the normal detection area. In this case, if there is a detection alarm, then a false alarm, they will seriously affect the performance and reliability of RAIM. Therefore, given the probability of false alarmthe Eq.(8) could be set up, and the thresholdgotten. Suppose
When there is a fault, the test statisticshould be greater thanwhich indicates that the fault has been detected. Ifis less thanit indicates that the detection is missed. The missed detection will seriously affect the reliability of RAIM, endangering the safety of train operation. Given the failure probability ofthe following probability equation should be satisfied:

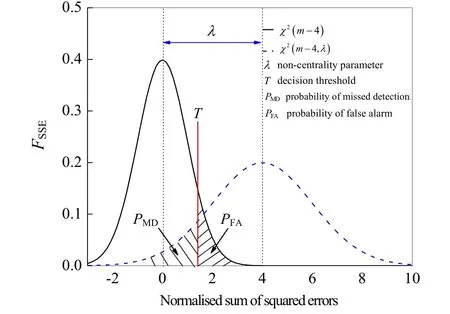
Fig.6 Density probability function FSSE of normalised sum of squared errors
2.2 Data processing model based on D-S evidence theory
The Dempster-Shafer (D-S) evidence theory algorithm is one of the statistical algorithms in the information fusion. It can deal with the uncertainty results from the shortage of information, and it is one of practical algorithms for data fusion[9]. In D-S evidence theory, Letbe the set of all possible values of the variable, andelements are mutually exclusive, thenis called as a sample space. If the number of elements in theis,then the set of all subsets incan be described byFor any subset ofthat belongs to, it corresponds to a number of and meets:
The basic belief of impossible proposition is zero,i.e.is an empty set;
According to the D-S evidence theory, the fusion belief assignment of propositionis:

This fusion algorithm can be used in multisensory measurement.
Deviation maximization method can automatically determine the weighted coefficient of each evaluation index, and the result is accurate. This paper uses this method to establish the basic probability of D-S evidence.
① Calculation model of pseudo-range residual evaluation factor
At a certain location, the pseudo-range residual should satisfy a certain range. The following non-dimensional treatment of its data and the calculation model of the evaluation factorof the pseudo-range residual are obtained:

② HDOP evaluation factor calculation model
At a certain location, the HDOP should satisfy a certain range. The non-dimensional treatment of its data and the calculation model of evaluation factor of the HDOP are obtained:

③ Evaluation factor calculation model for number of visible satellites
At a certain location, the number of visible satellites should satisfy a certain range. The non-dimensional treatment of its data and the calculation model of evaluation factorof the number of visible satellites are obtained:
Suppose the basic probability of (12)-(14) isestablish the following evaluation decision function[10-11]:

According to the (16) and the evaluation probability,the normalized decision matrixis constructed as:


for the optimal solution and the normalization process.The assessment of the probability of

The data fusion process based on D-S evidence theory is shown in Figure 7.

Fig.7 Data fusion process based on D-S evidence theory
Hypothesize that the first i measurement parameters in thetime on the thresholdfusion probability iswhereThe cumulative uncertainty assigned to the fusion target is[12-15]:


Fig.8 Basic probability assignment of evidence source
Figure 8 is the basic probability assignment of evidence source, where (a) is the basic probability assignment of evidence pseudo-range residual, (b) is the basic probability assignment of evidence distribution shape,and (c) is the basic probability assignment of evidence number of visible satellites.

By using the Dempster combination rule, the basic probabilityand the uncertainty ofmoments can be obtained:

∀q≠j, mij( k-1)miqkis the conflict coefficient between i and j. By using the Dempster combination rule,the basic probability of getting the target threshold value

According to the Eq.(22), we can calculate the target threshold whenfusion is uncertain:

Finally, according to the basic calculation probability and the target fusion model (12)-(23), the threshold value can be obtained by.
2.3 Database of train track satellites
As the train runs to different locations, the number of visible satellites used for positioning is different. Therefore,the number of visible satellites at different locations on the train can be predicted with the use of the satellite database information. The number of visible satellites is analyzed when the train runs to a certain location, which can improve the integrity of the positioning by combining with the real-time satellite navigation message. Vehicular GNSS system can be used to obtain the track tracing satellite database, update the database and calculate the satellite distribution data in the area in front of the track. The satellite coverage area is based on the satellite ephe- meris calculation function. All GNSS satellites in orbit on the ground elevation are greater than 8° of the coverage area.The train, based on the track database information, can predict the satellite distribution of the train after 10 min according to the information of the train track database.The whole process is shown in Figure 9.

Fig.9 Process of satellite prediction

Where μ=3.986 005×1014m3/s2is the constant of the earth gravitation. Then, the mean anomalymoment can be calculated from the mean anomalyat reference moment

Iterative calculation of anomaly


According to the ephemeris given in the argument of perigee calculation, we can calculate the ascending node distance

Then we can get the coordinates of the satellite in the orbit plane:


The derived satellite coordinates are:
According to the formula (32), we can calculate the satellite position:


If the geocentric angle between a point and pacific satellite is less than, then the point is in the coverage of this satellite .
3 Integrity enhancement results
3.1 Simulation and test
In order to validate the integrity enhancement method of GNSS for train positioning in this paper, a positioning and simulation platform based on GNSS is established, which includes GNSS satellite positioning receiver, GNSS antenna, D-S evidence theory processing module, satellite data storage database, and the integrity monitoring module. The positioning and simulation platform based on GNSS are shown in Figure 10, where 10(a)is GNSS receiver device, 10(b) is processing module,and 10(c) is AT300 GNSS antenna.

Fig.10 Positioning and simulation platform based on GNSS
GNSS receiver has three systems (BDS B1, GPS L1,GLONASS L1) and uses single frequency. The sampling rate of GNSS receiver is 2 Hz. Table 1 lists the main perfor- mance characteristics of GNSS receiver.

Tab.1 Main performance characteristics of GNSS receiver
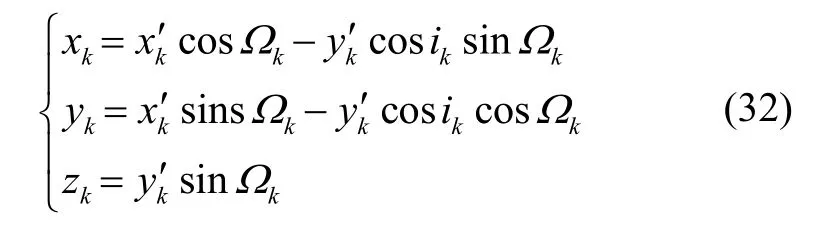
Due to the constraints of the railway line environment, the test distance of the Changsha Maglev line is about 18.55 km. Field test and trajectory is shown in Figure 11. The test time is about 11 min.
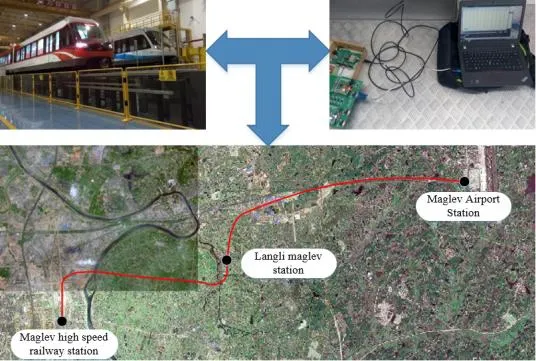
Fig.11 Field test and trajectory
According to the data collected by the GNSS receiver on the test line, the error distribution is shown in Figure 11(c). The HDOP value and the number of satellites are shown in Figure 12(a) and 12(b), respectively.The GNSS receiver signal may be missing due to the impact of housing construction.

Fig.12 Relevant data of GNSS receiver output in test line
3.2 Forecast analysis on train track satellite database
In this paper, the train track satellite database is proposed to predict the future location of distribution shape and the number of satellites. These data can be compared with real measurement data, which can improve the positioning of the integrity. The prediction results of the distribution shape and the number of satellites during the test period are shown in Figure 13(a) and 13(b).Table 2 is the true and predictive values of the average distribution of seven points in the test line. It can be seen that the predicted value is close to the true value.

Fig.13 Prediction results for distribution shape and the number of satellites during test period
Tab.2 Comparison between predictive value and true value
3.3 Integrity enhancement analysis
In order to verify the advantages of this method, this paper introduces horizontal position error (HPE) and horizontal protection level (HPL)[23-24].


Fig.14 Distribution of horizontal position errors and horizontal protection levels
Figure 15 shows the relationship between the probability of false alarm and the number of satellites. The blue line is calculated by the proposed method in this paper. It can be seen that the false alarm rate began to decline when the number of satellites is 1, and the probability of false alarm is almost 0 when the number of satellites exceeds 8.The black line is the result of the traditional RAIM algorithm. But the probability of false alarm is almost 0 when the number of satellites exceeds 15.

Fig.15 Relationship between the probability of false alarm and the number of satellites
Figure 16 is the distribution probability of the missed detection on the test line. It can be seen from Figure 16 that the proposed method has low misseddetection probability than the RAIM algorithm.
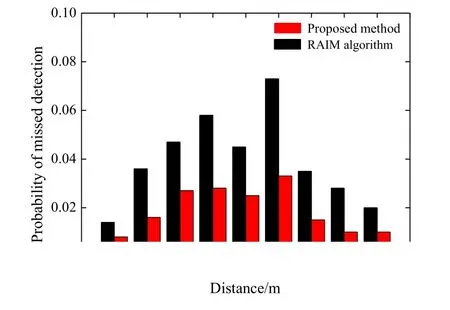
Fig.16 Distribution probability of missed detection
4 Conclusion
Integrity is a key performance index in the application of train positioning based on satellite navigation system.It is different from the conventional RAIM algorithm. In this paper, a D-S evidence theory based information fusion method and a train track satellite database are proposed to enhance the integrity of GNSS for train positioning. The D-S evidence theory is applied to the information processing of satellite navigation message,and the corresponding mathematical model is given. At the same time, the train orbit satellite database was established and the train location information was predicted by satellite ephemeris information.
In order to verify the feasibility of the method, a positioning device based on GNSS is built, and the data are calculated and analyzed. The comparison with the traditional RAIM algorithm shows that this method greatly improves the integrity of the GNSS, and can provide some references for enhancing the integrity of GNSS in train positioning.
[1]Lu D, Schnieder E. Performance evaluation of GNSS for train localization[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(2): 1054-1059.
[2]Marais J, Nahimana D F, Viandier N, et al. GNSS accuracy enhancement based on pseudo range error estimation in an urban propagation environment[J]. Expert Systems with Applications, 2013, 40(15): 5956-5964.
[3]Kaplan E, Hegarty C. Understanding GPS: Principles and
applications[M]. Artech House, 2005.
[4]Neri A, Rispoli F, Salvatori P, et al. A train integrity solution based on GNSS double-difference approach[C]//Proceedings of the 27th International Technical Meeting of the ION Satellite Division. 2014: 34-50.
[5]Legrand C, Beugin J, Marais J, et al. From extended integrity monitoring to the safety evaluation of satellitebased localization system[J]. Reliability Engineering &System Safety, 2016, 155: 105-114.
[6]Yan X H, Cai B G, Ning B, et al. Online distributed cooperative model predictive control of energy-saving trajectory planning for multiple high-speed train movements[J].Transportation Research Part C: Emerging Technologies,2016, 69: 60-78.
[7]Grimes J G. Global positioning system standard positioning service performance standard[J]. GPS & Its Augmentation Systems, 2008, 35(2): 197-216.
[8]Yang C S, Xu X H, Liu R H, et al. An improved RAIM algorithm based on the total least squares[C]//2008 International Conference on Computational Intelligence and Security. 2008, Vol.2: 319-324.
[9]Zhang Y H, Xu J, Du K. Information fusion algorithm for electromechanical equipment based on DS evidence theory[J]. Applied Mechanics and Materials, 2013: 1125-1128.
[10]Houston S W, Anselmo C S, Sullivan D P. Method and system for providing satellite coverage using fixed spot beams and scanned spot beams: US Patent 6,272,317[P].2001-08-07.
[11]Teunissen P J G, Odolinski R, Odijk D. Instantaneous BeiDou+GPS RTK positioning with high cut-off elevation angles[J]. Journal of Geodesy, 2014, 88(4): 335-350.
[12]Feng R, Che S, Wang X, et al. Trust management scheme based on DS evidence theory for wireless sensor networks[J]. International Journal of Distributed Sensor Networks,2013, 9(6): 948-952.
[13]Han Y, Chen Q, Wang J X. An enhanced DS theory cooperative spectrum sensing algorithm against SSDF attack[C]//2012 IEEE 75th Vehicular Technology Conference.2012: 1-5.
[14]Wu G Q, Li L, Li L, et al. Web news extraction via tag path feature fusion using DS theory[J]. Journal of Computer Science and Technology, 2016, 31(4): 661-672.
[15]Xu Li-jia. Improvement of DS theory in an information fusion system[J]. Systems Engineering and Electronics,2004, 26(6): 717-720.
[16]Gao H M, Liu H. Design of regional coverage resource satellite constellation based on analytical method[J]Modern Defence Technology, 2014, 45(2): 1894-1897.
[17]Mushet G, Mingotti G, Colombo C, et al. Self-organising satellite constellation in geostationary earth orbit[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015,51(2): 910-923.
[18]Kassabian N, Lo P L, Rispoli F. Augmented GNSS differrential corrections minimum mean square error estimation sensitivity to spatial correlation modeling errors[J]. Sensors,2014, 14(6): 10258-10272.
[19]Mushet G, Mingotti G, Colombo C, et al. Self-organising satellite constellation in geostationary earth orbit[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015,51(2): 910-923.
[20]Chiang K W, Lin C A, Kuo C Y. A feasibility analysis of land-based SINS/GNSS gravimetry for groundwater resource detection in Taiwan[J]. Sensors, 2015, 15(10):25039-25054.
[21]Liu J, Cai B, Wang J. Particle swarm optimization for integrity monitoring in BDS/DR based railway train positioning[C]//2014 IEEE Congress on Evolutionary Computation (CEC). IEEE, 2014: 792-797.
[22]Senesi F. Satellite application for train control systems:The test site in Sardinia[J]. Journal of Rail Transport Planning & Management, 2012, 2(4): 73-78.
[23]Blanch J, Walter T, Enge P, et al. Advanced RAIM user algorithm description: Integrity support message processing, fault detection, exclusion, and protection level calculation[C]//Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2012). 2012: 2828-2849.
[24]Roturier B, Chatre E, Ventura-Traveset J. The SBAS integrity concept standardised by ICAO: Application to EGNOS[J]. Navigation, 2001, 49: 65-77.
[25]Filip A, Maixner V, Mocek H, et al. Fault diagnosis in high integrity GNSS based train position locator[C]//Proceedings of 2nd European Space Agency Workshop on Satellite Navigation User Equipment Technologies. 2004:78-87.
[26]Toledo-Moreo R, Bétaille D, Peyret F. Lane-level integrity provision for navigation and map matching with GNSS,dead reckoning, and enhanced maps[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(1):100-112.
[27]Sabatini R, Moore T, Hill C. A new avionics-based GNSS integrity augmentation system: Part 1 - Fundamentals[J].Journal of Navigation, 2013, 66(3): 363-384.
[28]Sabatini R, Moore T, Hill C. A new avionics-based GNSS integrity augmentation system: Part 2 - Integrity flags[J].Journal of Navigation, 2013, 66(4): 501-522.
[29]Vartziotis D, Goudas I, Savvas S, et al. Roadscanner:feasibility study and development of a GNSS-probe for creating digital maps of high accuracy and integrity[J].Procedia - Social and Behavioral Sciences, 2012, 48:2473-2481.
1005-6734(2017)04-0500-10
10.13695/j.cnki.12-1222/o3.2017.04.014
2017- 04-17;修回日期:2017-07-22
甘肃省基础研究创新群体计划项目(1606RJIA327);西部之光青年学者计划(2016ZKX03);博士后科学基金面上项目(2017M613242);陇原青年创新人才扶持计划(G16038)
陈光武(1976—),男,教授,硕士生导师,从事惯导和组合导航研究。E-mail: cgwyjh1976@126.com
基于GNSS的列车定位信号完好性提高方法
陈光武1,2,王 迪1,2,刘射德1,2,李 鹏1,2
(1. 兰州交通大学 自动控制研究所,兰州 730070;2. 甘肃省高原交通信息工程及控制重点实验室,兰州 730070)
全球导航卫星系统 (GNSS) 应用于铁路领域,能够为列车运行控制系统提供实时的位置信息。同时列车定位应当满足一定的安全标准,因此如何提高基于GNSS列车定位的完好性就显得尤为重要。首先,介绍了目前传统的列车定位方式和应用方法;其次,基于D-S证据理论和列车轨道卫星数据库提出了一种新的提高列车定位完好性的方法。最后,通过仿真和实验验证表明:该方法对GNSS在铁路领域的应用具有重要的参考价值。
GNSS;列车定位;信号完好性;D-S证据;列车轨道卫星数据库
U284
A
