模糊能耗及卡尔曼滤波的电动汽车剩余续驶里程估算
2017-11-14谢明维盘朝奉
陈 燎,谢明维,盘朝奉,b
(江苏大学 a.汽车与交通工程学院;b.汽车工程研究院,江苏 镇江 212013)
模糊能耗及卡尔曼滤波的电动汽车剩余续驶里程估算
陈燎a,谢明维a,盘朝奉a,b
(江苏大学 a.汽车与交通工程学院;b.汽车工程研究院,江苏 镇江 212013)
为了提高电动汽车的剩余续驶里程估算精度,在工况识别基础上,提出了一种将模糊能耗与卡尔曼滤波相结合的剩余续驶里程估算模型。建立了整车能耗模型;在MATLAB/Simulink下建立特征参数与能耗之间的模糊规则库;基于卡尔曼滤波对输出剩余续驶里程进行优化。优化结果表明:采用该方法的行驶里程实际值与期望值平均误差为2.11%,相比传统平均能耗法,其剩余续驶里程估算精度提高了77%。
电动汽车;剩余续驶里程估算;模糊能耗;卡尔曼滤波
0 引言
电动汽车由于环保和节能等优点越来越受到人们的关注,为了提高电动汽车使用的方便性,不仅要提高续驶里程,还要研究电动汽车状态的实时监测和剩余续驶里程的实时估算,从而为驾驶员提供准确的车辆信息。电动汽车剩余续驶里程受多方面因素的影响。文献[1]研究表明:电动汽车的剩余续驶里程与环境因素和电池的一致性有关,主要考虑环境温度的影响。由于影响剩余续驶里程的因素较多,其计算方法还不完善,需要进一步研究。
文献[2]根据电池能量状态预测行驶工况的方法进行剩余续驶里程预测。文献[3]采用工况识别的方法进行剩余续驶里程预测。文献[4-8]根据车辆在前一段时间的平均能耗和电池剩余能量来估算车辆未来行驶能耗和剩余续驶里程,此方法估算结果比较保守,且在工况急剧变化情况下估算不稳定。文献[9-12]通过全球定位系统来预测剩余续驶里程,该方法具有一定前沿性,但是需要配备强大的汽车行驶数据处理平台。
上述文献虽然采用不同的方法对剩余续驶里程进行了估算,但对输出结果并未作优化处理,即未考虑车辆因行驶工况变化较大时剩余续驶里程大幅度变化的情况,从而降低了估算精度。本文将模糊能耗与卡尔曼滤波(Kalman filter,KF)相结合,既充分考虑电动汽车剩余续驶里程的影响因素,也能够减少电动汽车状态参数误差引起的剩余续驶里程估算偏差。
1 整车能耗建模
车辆能耗分为行驶能耗和附件能耗,以行驶能耗为例进行整车能耗建模。车辆行驶能耗主要由行驶阻力消耗能耗、电机效率损失能耗、电池内阻消耗能耗和能量回收增加能耗4部分组成。
(Ⅰ)行驶阻力
车辆行驶过程中行驶阻力为:
Ft=mgfcos α+CDAv2/21.15+mgsin α+mδa,
(1)
其中:Ft为行驶阻力,N;m为汽车质量,kg;f为滚阻因数;CD为风阻因数;v为车速,km/h;g为重力加速度,kg/N;A为挡风面积,m2;δ为传动系的旋转惯量因数;α为爬坡度,%;a为加速度,m/s2。
行驶阻力损失的功率PF为:
PF=Ftv/3 600。
(2)
(Ⅱ)电机效率损失
驱动过程中,电机理论输出功率P和实际输出功率Pa分别为:
P=Tn/9 550;
(3)
Pa=(Tn/9 550)/η,
(4)
其中:T为需求转矩,N·m;n为电机转速,r/min;η为当前转矩及转速下的电机效率。
电机效率损失的功率Pm为:
Pm=Pa-P。
(5)
(Ⅲ)电池内阻损失的功率Pb:
Pb=I2Rall,
(6)
其中:I为电池母线电流,A;Rall为电池总内阻,Ω。
(Ⅳ)能量回收
再生制动时的功率Pg为:
Pg=UI,
(7)
其中:U为电池端电压,V;I为电池母线电流,A。
因此,行驶过程中车辆总能耗Ecost为:

(8)
其中:t为车辆行驶的总时间,s。
2 剩余续驶里程估算
2.1建立特征参数与能耗之间的模糊规则库

表1 纯电动汽车整车主要参数

图1 车速与能耗的关系
建立纯电动汽车整车能耗模型,其整车主要参数如表1所示,输入工况为30个典型标准工况。按照60 s一个片段进行总能耗计算,计算公式如式(8)所示,从而得出车速与能耗之间的关系,如图1所示(任意选取一个工况)。根据模糊规则库建立特征参数与能耗之间的模糊规则库。首先,根据行驶工况判别当前片段所处类别;其次,获取当前片段的平均速度vmean、匀速比例P、减速比例N和总能耗Eout这4个特征参数;然后,依次对每类聚类的每个特征参数选取11组数据,并对每组数据按照从小到大的顺序排列。再建立模糊库,输入3个参数(平均速度vmean、匀速比例P和减速比例N),输出1个参数(总能耗Eout)。最后,建立模糊规则,其规则根据每组参数的排列位置,按照条件A为真且条件B为真且条件C为真,执行条件D原则。例如:在工况类别为畅通市内工况时,能耗的模糊规则库如图2所示。图2中:输入平均速度vmean为16.935 9~39.963 8 km/h;匀速比例P为0.209 7%~0.455 2%;减速比例N为0.544 7%~0.790 2%;总能耗Eout为 0.035 9~0.246 2 kW·h。
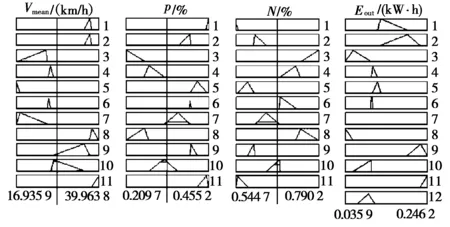
图2 能耗的模糊规则库
2.2单位能耗行驶里程优化方案
在电动汽车行驶过程中,获取当前最近一个片段数据,并计算出所属聚类类别,再对平均速度vmean、匀速比例P和减速比例N进行模糊,计算出当前片段能耗,从而累积算出总能耗。文献[1-3]根据当前已经行驶里程和当前总消耗能量相除方法得出单位能耗行驶里程l,再由l与剩余能量Erest相乘得出剩余里程。此方法在车辆处于以下条件时所估算的续驶里程存在一定不足:当前片段工况为急加速;当前片段工况为急减速;当前片段以及相邻几个片段工况存在大量急加速和急减速。为了避免上述缺点,本文根据实际经验对单位能耗行驶里程进行优化。
为了满足续驶里程呈线性递减趋势的要求,建立单位能耗与剩余能耗的线性关系为:
l=lmin+k(Erest-Emin),
(9)
其中:lmin为聚类算法得出的单位能耗行驶里程最小值[13],根据聚类结果取2 km/(kW·h);Erest为电池剩余电量,kW·h;Emin为保守最低电量,根据实际情况取4 kW·h;k为线性预估计量。
车辆行驶过程中行驶里程和电池电量关系为[14]:

(10)
其中:S为行驶里程,km;f为滚阻因数;m为整车净质量,kg;A为挡风面积,m2;Etotal为车辆总电量,取28.2 kW·h;CD为风阻因数,取0.294;车速v取40 km/h。即可得出车辆以40 km/h匀速行驶时的最大行驶里程。车辆最大行驶里程为:
Etotal(lmin+k(Etotal-Emin))=S。
(11)
根据式(9)~式(11)可得出k=0.206 6。k值主要由车辆电池总电量和该车辆按照最佳车速行驶时的最大行驶里程决定,即此值可根据车辆不同参数进行标定。
最终剩余续驶里程为:
Srest=(Etotal-Ecost)×l。
(12)
2.3基于卡尔曼滤波的剩余续驶里程优化估算
汽车仪表上显示的剩余续驶里程周期不一致,会出现显示里程波动较大的情况。例如,仪表按照每行驶1 km显示一次,比每行驶10 km显示一次波动大。从剩余续驶里程准确性估算的角度分析,选择的行驶里程越多,估算就越准确,因为行驶里程越多,获取的历史数据就越多,而对存在“里程焦虑感”的消费者来说,需要实时显示剩余续驶里程。

xk=Axk-1+Buk-1+qk-1;
(13)
yk=Hxk+rk。
(14)
其中:xk为k时刻的系统状态;uk为k时刻对系统的控制量;A和B为系统参数,对于多模型系统,他们为矩阵;yk为k时刻的测量值;H为测量系统的参数,对于多测量系统,H为矩阵;qk和rk分别为估算和测量的实际里程。他们被假设成高斯白噪声,协方差分别是Q和R。假设估算里程和测量里程都是高斯分布的,协方差矩阵分别为Qk-1和Rk。卡尔曼滤波器是最优的信息处理器,给出的卡尔曼滤波算法流程和5个核心更新方程如下:
(Ⅰ)卡尔曼滤波算法包含预测方程和协方差方程,其方程参考文献[15],卡尔曼滤波算法框架如图3所示。
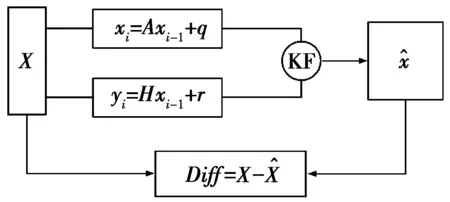
图3 卡尔曼滤波算法框架
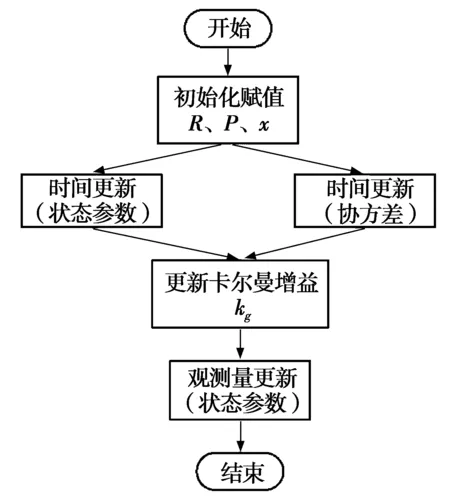
图4 卡尔曼滤波算法流程图
(Ⅱ)卡尔曼滤波5个核心更新方程分别为时间更新和状态更新,其方程参考文献[15],卡尔曼滤波算法流程如图4所示。
根据卡尔曼滤波算法人工随机测试几组数据,如表2所示。表2中:T0~T9为实测时间点;Srestk为实测剩余续驶里程,km;Srestkshow为仪表显示剩余续驶里程,km;r为最优偏差;φ为不确定度;kg为增益因数;σ为标准协方差。从表2可以看出:实测剩余续驶里程Srestk处于大范围波动,而经过卡尔曼滤波后的仪表显示剩余续驶里程Srestkshow处于小范围波动,达到实际滤波效果。
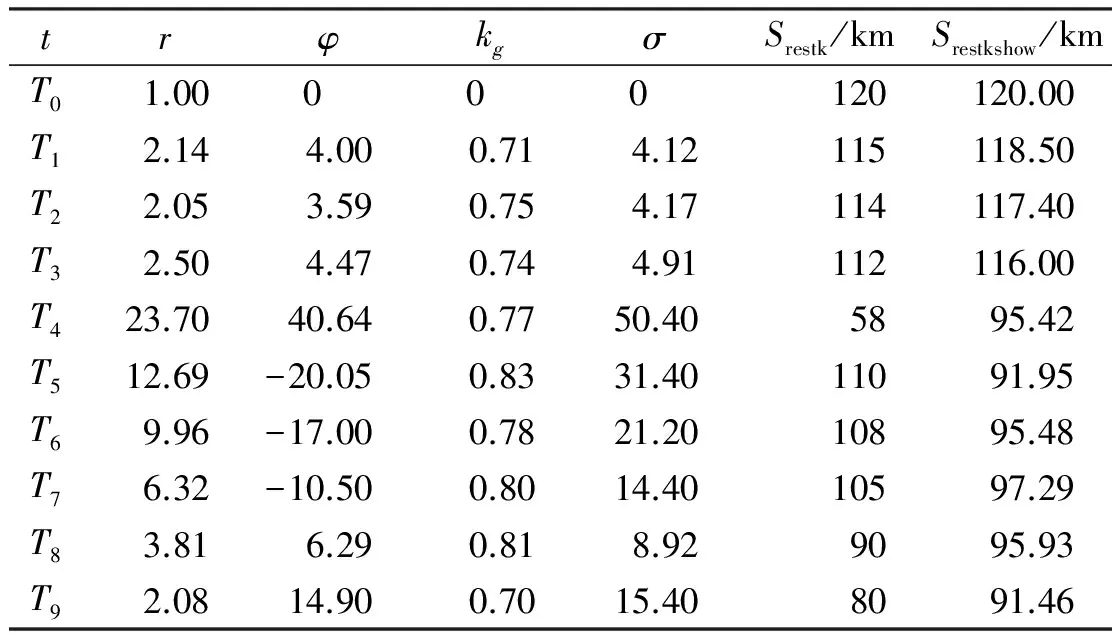
表2 经过卡尔曼滤波后的剩余续驶里程数
3 剩余续驶里程仿真及实验
3.1剩余续驶里程仿真验证
为了验证本文提出的卡尔曼滤波算法在剩余续驶里程估算中的优化效果,以及在不同工况下的适应性与鲁棒性,分别对城市道路循环(urban dynamometer driving schedule,UDDS)工况和欧洲经济委员会(economic commission of Europe,ECE)工况进行仿真对比[10-15],结果如图5和图6所示。车辆初始续驶里程计算方程如下:
(15)
其中:SOC为电池电荷状态,%;SOH为电池健康状态,%;C为电池额定容量,A·h;V为电池当前电压,V;InitEC为单位行驶里程消耗的能量,(kW·h)/km,此参数为标定量,根据车辆按照最大行驶里程所消耗的总能量来标定。
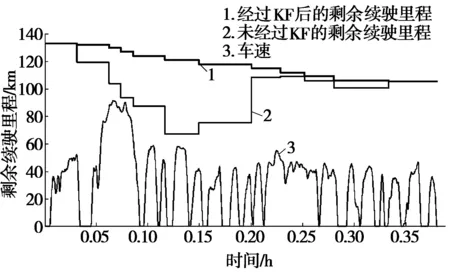
图5 基于UDDS工况剩余续驶里程仿真
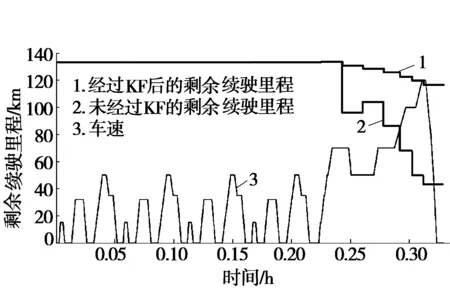
图6 基于ECE工况剩余续驶里程仿真
从图5和图6可以看出:在行驶工况未明显变化时,经过卡尔曼滤波和未经过卡尔曼滤波的剩余续驶里程并未体现太大的差异;当行驶工况处于大范围波动时,例如,突然急加速或者急减速时,经过卡尔曼滤波后的剩余续驶里程明显多于未经过卡尔曼滤波处理的剩余续驶里程。
3.2基于ECE工况的剩余续驶里程估算试验验证
3.2.1卡尔曼滤波对剩余续驶里程的影响
在ECE工况下通过转鼓试验台对纯电动汽车进行测试,其整车主要参数如表1所示。在试验前首先对该车进行实际续驶里程摸底测试,得出单位行驶里程能量消耗,即在电池SOC=100%的前提下,在转鼓试验台上一直循环行驶ECE工况。根据实测情况,该车总共完整行驶17个ECE工况,一个工况里程大约是10.986 km,即该车总行驶里程为186.762 km,又由该车额定电量得出该车单位行驶里程消耗为0.151 (kW·h)/km。试验时,该车SOC为93%,即车辆通电后根据SOC估算的剩余续驶里程为172 km,进行3次ECE工况测试,其测试结果如图7所示。

图7 基于ECE工况的剩余续驶里程试验
由图7可知:3次工况实际行驶里程为32.950 km,实际消耗的电量为5.124 kW·h,按照试验前标定的参数预测行驶里程应该为33.933 km;采用行驶工况识别法得出已经行驶里程为37.000 km,绝对误差为 3.067 km;而采用模糊能耗与卡尔曼滤波结合的行驶工况识别法得出的已经行驶里程为 31.000 km,绝对误差为2.933 km。对比得出:模糊能耗与卡尔曼滤波相结合的工况识别方法不仅能准确估算剩余续驶里程,而且可以消除车辆行驶过程中因工况不同造成的剩余续驶里程大幅度波动。
3.2.2本文算法与传统算法的对比试验
在卡尔曼滤波的条件下,将提出的模糊能耗与卡尔曼滤波相结合算法与传统平均能耗算法进行对比试验,试验时该车SOC为100%,即车辆通电后根据SOC估算的续驶里程为181.00 km,一直跟踪ECE工况,直到车辆无法行驶为止。行驶总时间是5.89 h,实际总能耗为 27.33 kW·h,实际续驶里程为 181.20 km。图8和图9分别为平均能耗算法和模糊能耗算法的实际续驶里程与期望续驶里程比较。图8的期望续驶里程与实际续驶里程之间的最大绝对误差为3.87 km,绝对误差平均值为1.79 km,平均误差为9.35%。图9的期望续驶里程与实际续驶里程之间的最大绝对误差为1.37 km,绝对误差平均值为0.58 km,平均误差为2.11%,相比传统平均能耗法剩余续驶里程估算精度提高了77%。图8和图9对比说明:与平均能耗算法相比,采用模糊能耗算法对纯电动汽车剩余续驶里程估算是可行的,并在一定程度上能提高估算精度。为了更合理地估算剩余续驶里程,在SOC低于30%时采用保守估算,即同时将SOC估算的剩余续驶里程也考虑进去,两者取最小值。采用模糊能耗与卡尔曼滤波结合算法也提高了车辆能耗估算精度。在ECE工况仿真下总能量消耗为 26.71 kW·h,本文方法测试结果总能耗为27.11 kW·h,因试验车未考虑附件能耗,因此,其测试结果偏大。
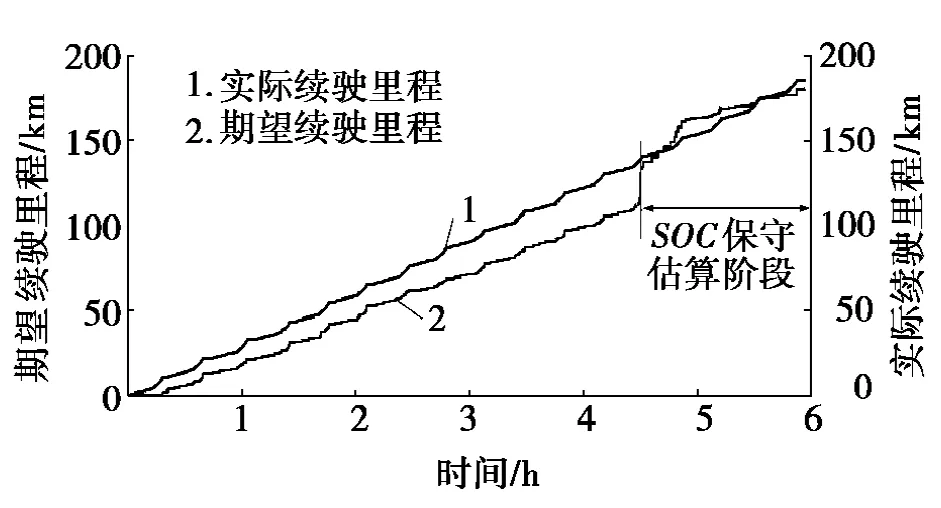
图8基于平均能耗剩余续驶里程试验

图9基于模糊能耗剩余续驶里程试验
4 结束语
在能耗建模方面,基于MATLAB的模糊规则建立特征参数与能耗之间的模糊规则库,然后,根据实际经验对单位能耗行驶里程进行优化,从而得到完善的工况识别与能耗之间的映射。在剩余续驶里程滤波方面,因剩余续驶里程呈一维不确定的跳变,其输出精度跟行驶工况密切相关,因此,本文采用卡尔曼滤波对输出里程进行再次优化,确保输出给仪表的剩余续驶里程在小范围波动。本文方法在新能源汽车的剩余续驶里程预测中具有一定的可行性及实用价值,从而为新能源汽车的剩余续驶里程估算提供一种新的途径。
[1]陈勇,孙逢春.电动汽车续驶里程及其影响因素的研究[J].北京理工大学学报,2001,21(5):578-582.
[2]刘光明,欧阳明高,卢兰光,等.基于电池能量状态估计和车辆能耗预测的电动汽车续驶里程估计方法研究[J].汽车工程,2014,36(6):1302-1309.
[3]伊安东,赵韩,周斌,等.基于行驶工况识别的纯电动汽车续驶里程估算[J].汽车工程,2014,36(11):1310-1315.
[4]SIY T,HERRMANN M A,LINDEMANN T P,et al.Electrical vehicle range prediction:US 8433455[P].2011-08-08.
[5]FRANKE T,KREMS J F.Interacting with limited mobility resources:psychological range levels in electric vehicle use[J].Transportation research part a (policy & practice),2013,48(2):109-122.
[6]MAZUROWSKI M A,HABAS P A,ZURADA J M,et al.Training neural network classifiers for medical decision making:the effects of imbalanced datasets on classification performance[J].Neural networks,2008,21(2/3):427-36.
[7]MEYER-EBELING J,ROTH M.Method for estimating the range of a motor vehicle:US 8594918 B2[P].2010-10-29.
[8]LU L,HAN X,LI J,et al.A review on the key issues for lithium-ion battery management in electric vehicles[J].Journal of power sources,2013,226(3):272-288.
[9]ZHANG C,VAHIDI A,PISU P,et al.Role of terrain preview in energy management of hybrid electric vehicles[J].IEEE transactions on vehicular technology,2010,59(3):1139-1147.
[10]PILLER S,PERRIN M,JOSSEN A.Methods for state-of-charge determination and their applications[J].Journal of power sources,2001,96(1):113-120.
[11]ZHANG X.Thermal analysis of a cylindrical lithium-ion battery[J].Electrochimica acta,2011,56(3):1246-1255.
[12]ZHU C,LI X,SONG L,et al.Development of a theoretically based thermal model for lithium ion battery pack[J].Journal of power sources,2013,223(1):155-164.
[13]张袅娜,丁海涛,于海芳,等.基于核主元约简与半监督核模糊聚类的车辆行驶工况判别[J].机械工程学报,2015,51(2):96-102.
[14]刘伟.电动汽车动力性与续驶里程分析[D].秦皇岛:燕山大学,2013.
[15]任密蜂.非高斯系统的控制及滤波方法研究[D].保定:华北电力大学,2014.
国家自然科学基金项目(51105178,51475213);江苏省自然科学基金项目(BK2011489);江苏省“六大人才高峰”基金项目(2013-XNY-002)
陈燎(1963-),男,四川德阳人,副教授,博士,硕士生导师,主要从事汽车电子及智能交通系统方面的研究.
2016-04-06
1672-6871(2017)01-0028-06
10.15926/j.cnki.issn1672-6871.2017.01.006
U469.11
A
