哺乳母猪精准饲喂下料控制系统的设计与试验
2017-11-13熊本海郑姗姗潘晓花吴郭涛
熊本海,杨 亮,郑姗姗,曹 沛,潘晓花,吴郭涛
哺乳母猪精准饲喂下料控制系统的设计与试验
熊本海1,杨 亮1,郑姗姗1,曹 沛2,潘晓花1,吴郭涛2
(1. 中国农业科学院北京畜牧兽医研究所,动物营养学国家重点实验室,北京100193; 2.河南南商农牧科技股份有限公司,郑州453500)
为满足哺乳母猪获得最大采食量并达到精准饲喂控制等需求,以哺乳母猪为试验对象,设计了一种新型哺乳母猪精准下料控制系统。研究通过控制电动杆的推杆速率、输入电压及电源功率的协同工作,以获得稳定的下料量;采用预设的个性化的采食量模型与变容积的精确控制技术,实现对预设饲喂量的准确投喂。系统设计了下料控制系统,主要由定量仓体、电动推杆、堵料上球及堵料下球等部件及嵌入式控制系统组成。试验结果表明,1) 当电源功率为150 W时,推杆启动时电压变化略小,对单机下料的精准性影响较小,且当电动推杆速率为60 mm/s,输入电压为11.5 V,下料效果最好(<0.001),变异系数(CV=3.526%)最小;2)预设的采食量曲线接近哺乳母猪的采食规律,且采食量曲线收敛于对数曲线;3)智能饲喂系统采用4次/d的饲喂频率及与采食曲线的协同工作,与人工饲喂对比,能进一步促进采食量,且采用变化的饲喂时间间隔(06:00,10:00,15:00及22:00),并在不同时间点的饲喂采食量比例分别为30%、20%、20%、30%时,总的采食量最大。综上,该文设计低成本的哺乳母猪精准下料控制系统,采用基于电动推杆的控制机构与嵌入式系统的协同工作,设备控制简单,下料稳定,计量准确,与进口设备及以螺旋输送原理为基础的过往系统比较,成本具有明显优势,适合在中国大、中、小型的种猪场的哺乳车间推广应用。
控制系统;设计;嵌入式系统;哺乳母猪;电动推杆;采食量
0 引 言
繁殖母猪的生产力水平不仅直接影响生产者的经营效益,更影响到每个地区乃至国家猪肉的有效供给水平[1]。中国繁殖母猪存栏量在2012年达到高峰即5 069万头,但随着养猪周期、社会经济及劳动力结构与各种成本因素的影响,散养户逐步退出,母猪存栏量逐年调整下降,到2016年存栏降至3657万头[2]。尽管繁殖母猪的生产力(piglets weaned/sow/year,PSY)逐步提升,但是因母猪存栏数不足,导致自2015年以来猪肉的有效供给不足,猪价及猪粮比高位运行,猪肉进口量逐年上升,2016年创历史新高达到162.03万t,同比增加108.40%,成为名副其实的全球最大猪肉进口国[3],引取全社会对猪业的广泛关注。
对哺乳母猪采用智能化饲喂能有效提高母猪受胎分娩率、窝产仔数、窝产活仔数、初生窝质量、泌乳力、窝断奶仔猪数和21日龄断奶窝质量等繁殖性能,降低母猪返情率和淘汰率[4]。许栋等[5]研究表明,智能化饲喂哺乳母猪可减少窝弱仔数、显著提高断奶仔猪质量及提高采食量,熊本海等[6]研发的第一代系统经饲喂试验表明,针对哺乳母猪的4餐/d的智能饲喂方式,实际采食量平均高于人工饲喂方式,且采食量的曲线更加接近理论采食量曲线,同样使得平均的仔猪断奶体质量优于非智能饲喂。总之,全智能化饲喂方式的饲喂效果得到生产实践的认可。就智能饲喂设备而言,典型的有加拿大研制的Gestal哺乳母猪饲喂管理系统[7],VELOS智能化母猪饲养管理系统[8]、润农哺乳母猪饲喂系统[9]、成都肇元[10]及华科智能[11]的母猪饲喂系统等。上述系统的共同点是,精准下料机构采用水平蛟龙输送机,类似于妊娠母猪的电子饲喂站,通过与中央控制器的协同工作,控制每次的下料时间与下料量,实现对单个哺乳母猪的定时与定量饲喂。但是,经过在中国南方猪场的饲喂应用发现,采食上述饲喂方式存在的不足有:1)每个哺乳周期(规模化猪场一般为21 d)结束后,水平蛟龙输送机中一般有剩余料,而后续的哺乳母猪不会立即上产床,若不及时清理设备,残余饲料发霉,尤其在南方的雨季问题更为突出,但是该机构快速清理残余料并不方便;2)系统中的缓冲料仓需要经常人为上下移动料位控制杆,以防结拱,增加了人为的工作量;3)采用蛟龙输送机,要求窗体及辅助部件采用钢制材料,使得材料及制造费用较高,安装不便利,导致按每个产床配一套饲喂器的投入对于规模化的种猪场较大。因此,针对上述问题,创新突破下料方式,开发一种下料精准、无饲料残留,操作维护方便、性能稳定、成本低廉且控制便利的新一代哺乳母猪智能饲喂系统,具有潜在的巨大需求。
本研究设计了一种哺乳母猪自动饲喂器,主要采用简单的通过料仓内容积的变化控制下料量,辅助以桌面计算机及单机智能终端控制系统,满足哺乳母猪少吃多餐的技术需求,使采食量最大化,无剩料的发生。通过饲喂中试试验,获得了设备的合理饲喂参数。
1 哺乳母猪自动饲喂机电控制系统
1.1 哺乳母猪精准下料控制系统整体结构图
图1为哺乳母猪精准下料控制系统整体结构图,主要由控制面板1、储料仓2、定量仓3、推杆固定板4、电动推杆5、缓冲弹簧6、堵料上球7、堵料下球8及供料管与儲料仓的接口处组成。
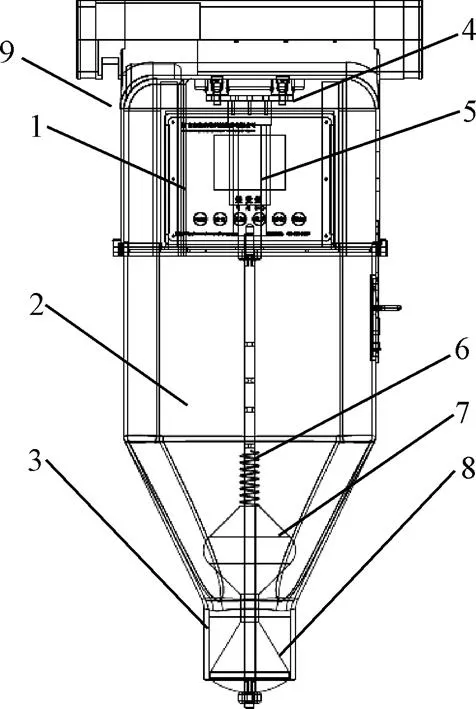
1.控制面板 2.储料仓 3.定量仓 4.推杆固定板 5.电动推杆 6.缓冲弹簧 7.堵料上球 8.堵料下球 9.供料管与儲料仓接口处
图1所示整个供料系统的最大特点是结构紧凑,供料系统与下料装置通过儲料仓的上部分巧妙连接为一体,电动推杆部件与控制面板的里外融合构成儲料仓的上部分,儲料仓主体(圆柱部分及倒锥体部分)与定量仓部分通过电动推杆的工作协同下料,使得整个系统从上到下极为紧凑,体积小,耗料少,运行过程节能,维护方便,符合智能农机研发的趋势。
1.2 料槽喂料机构设计
下料原理如图2所示,该下料机构是通过电动推杆上下运动带动堵料上、下球上下移动,而定量仓体积一定以确保饲料精准下料。推杆向下运动堵料上球封堵料仓而堵料下球脱离料仓进行定量下料动作;推杆向上运动堵料上球脱离料仓而堵料下球封堵料仓进行定量储料动作。可见,这种下料方式通过电动推杆与堵料上、下球的联动,完成定量下料,就饲喂装置的定量仓而言,既无残留,又能搅动储料仓上部分的饲料结拱,结构简单又高效。但每次下料的数量直接受控于电动推杆的速度特性,电动推杆速率受电压的影响,电动推杆的工作电压也会受到供电电源的特性,相关设备协同工作的影响,需要通过现场采集数据去测定影响结果。

1.堵料下球 2.定量仓 3.堵料上球 4.电动推杆
1.3 不同电动推杆速度及工作电压对下料量的测试
电动推杆实质上是一种能够来回往返运动的,且通过电力驱动的机构。其电动机通过一对齿轮减速后带动一对丝杠螺母把电机的旋转运动变为直线运动,利用电动机正反转完成推拉动作,推力和拉力相等。本研究采用国产直流电动推杆LEC606[12],主要参数包括输入电压、推杆速度(mm/s)、工作行程及负载(N)等。测试研究在河南兰考县种猪场内进行,考虑的影响因素为输入电压和电推杆速度。其中输入电压设定2个水平即11.5和12.5 V,电推杆速度也是2个水平即40和60 mm/s,共计2×2=4个处理,获得了110个观察值。观察指标为电动推杆完成一个行程,即电动机完成正反转至堵料下球封堵住料仓的下料量(g),测试时保持定量仓上端的储料充足,保证测试数据准确。试验数据的统计结果列在表1中。

表1 电动推杆速度及输入电压对下料特性的影响
注:同列数据间标不同的小写字母表示差异显著(<0.05)。
Note: In the same column, values with different small letter superscript mean significant difference (<0.05).
表1数据处理表明,推杆速度及输入电压总体上显著影响下料特性(<0.001),慢推杆速度与快推杆速度相比,前者因为速度较慢,重力对下料量的影响增大,单次行程下料量显著高于后者,单机下料量的变异也增大;其次,本试验中的12.5 V工作电压对应的电源功率为100 W较小,在推杆启动时电压变化较大,影响单机下料的精准性,而11.5 V工作电压对应的电源功率为150 W较大,在推杆启动时电压变化略小,对单机下料的精准性影响较小,使得电源功率较大且输出电压稳定的处理(60 mm/s,11.5 V)的下料效果最好,变异系数3.526%也是最小的。
1.4 饲喂器单机控制系统下位机设计
本系统在实际部署中,单个饲喂器系统由下位机实现单独控制,但不同的饲喂系统又能通过远程的PC端进行饲喂参数的设置及数据的统一采集与贮存管理。在本系统中,系统预设了每次下料的比例,同时也可以通过下位机或远程控制的方式,修改下料比例参数,以进行不同的采食量和饲喂效果的试验。
本研究的饲喂器单机控制的下位机电路由2块面板组成,并通过线插件链接起来。图4所示为下位机的前面板电路,它是以微处理器(MCU,LPC1766,工作温度−40~105 ℃,工作电压2.0~3.6 V,闪存256 K,低功耗)为核心[13],主要由指令按键输入、数据通信电路、数据贮存(铁电存贮)电路、数据显示及外设驱动电路等组成。系统采用先进先出的堆栈存贮模式,按每天毎头猪饲喂4次的数据量计算,可贮存大约2个月的个体饲喂过程数据。下位机的存贮数据可逆向上传到上位机系统存储,用于累计大量的饲喂数据。
下位机的另一块控制电路为图3所示电路的辅助电路,主要服务于(1.2)部分所述的电动推杆,即为推杆电机提供稳压电路、驱动电机及电流检测电路,确保电动推杆的电压稳定,避免电机启动时电压过大、推杆速度过快导致推杆卡死。
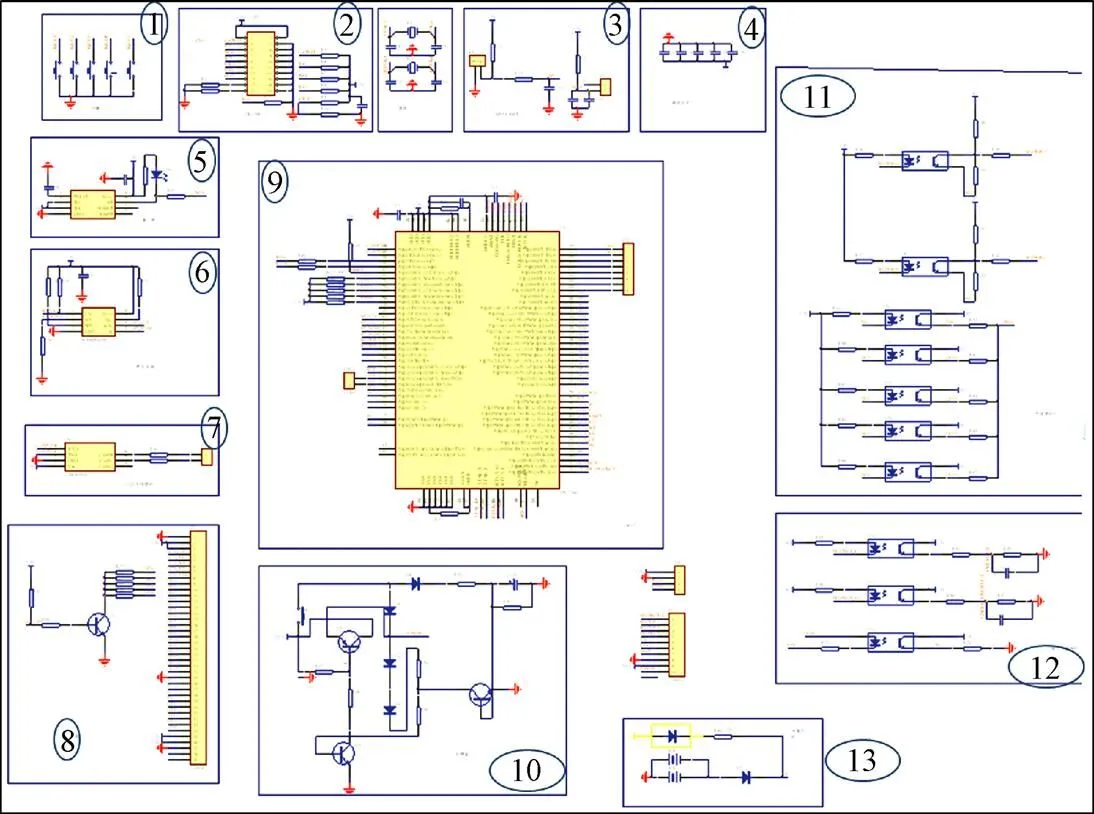
1.按键 2.JTAG仿真接口 3.ISP与RESET 4.滤波电容 5.看门狗 6.铁电存储 7.CAN总线驱动 8.LCD接口 9.MCU 10.电源启动与关闭 11.外设驱动 12.电流过流保护与低压检测 13.后备电池
1.5 PC端上位机开发
“饲喂控制PC端系统”即上位机系统的主界面,采用的数据库系统为My SQL数据库[14],并采用C#语言编写代码[15],主要的功能模块包括数据信息、系统管理、用户管理及数据库管理等。在“系统管理”模块中,设置了“饲喂器管理”,可以设置每台设备的饲喂参数,包括不同哺乳日龄对应的每日饲喂量、每日喂料次数、喂料时间点及每次喂料量(占总量的比例),过上位机可以一次性向若干台饲喂器下发饲喂参数,对于差异性数据再个案处理,大大提高系统处理数据的效率。特别地,上位机系统可以去读取下位机的在线数据并更新下发的数据。
1.6 研发设备的安装与使用
研发的设备在河南兰考县种猪场进行了安装与使用,图4为相关现场情景图片。
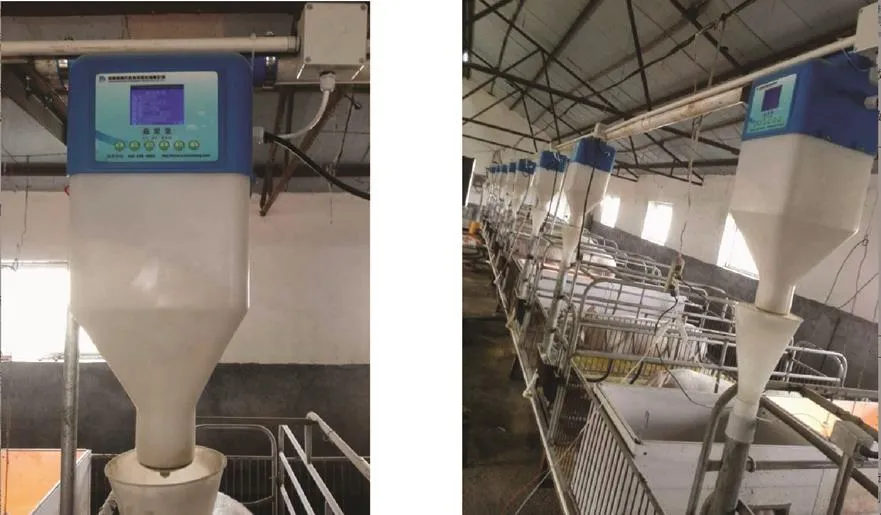
图4 饲喂器现场安装使用场景
2 饲喂试验
2.1 不同饲喂方案采食量规律比较研究
为提高哺乳母猪的泌乳性能,一般在分娩后前2 d控制采食,然后逐日增加,在1周后达到正常采食量,在20~25 d,日采食量可以达到5~6 kg,其后泌乳量下降,在断奶前2~3 d,逐步控减采食量至断奶。通过智能化饲喂,依据采食量的精细化调控策略,寻求整个泌乳期间总的采食量最大化。但是,在给定采食量的前提下,如何使实际采食量达到预期是精准饲喂的难点,与具体的饲喂制度有关。首先是日饲喂次数,结合猪只的采食行为与生理特点,一般认为3~5次适宜[16-18]。本研究综合设备饲喂的便利及预饲喂试验的效果,采用饲喂时间间隔逐步增加,且饲喂4次的饲喂节律,即按06:00、10:00、15:00、22:00时间点饲喂。但是,每次采食量的最佳比例尚无定论。本研究结合对规模化猪场的调研,选用了2个比例,即方式1为30%、25%、25%及20%,方式2为30%、20%、20%及30%,进行了饲喂试验。
试验组选用了60头母猪为初产和二胎母猪,其平均窝产仔数为9.46头。母猪产房为半开放式,舍内日平均气温在28~31 ℃左右,最低气温在25~27 ℃。对照组为人工饲喂组,随机选取30头体况、胎次相近的哺乳母猪,饲喂周期30 d,每天分别记录了人工饲喂及2种智能饲喂方式下各组母猪的平均采食量,采食具有相同养分浓度的哺乳母猪日粮,且日粮设计综合参考了中国《猪饲养标准》[19]及NRC(1998,2012)建议的《猪的营养需要量》[16,20]中有关哺乳母猪的日粮浓度。其中,主要饲料原料的养分数据参考了第26~27版《中国饲料成分及营养价值表》[21-22]及AMINO Dat®5.0[23]对记录的采食数据,采用对数模型模拟,分别获得图5所示的3套采食量曲线。
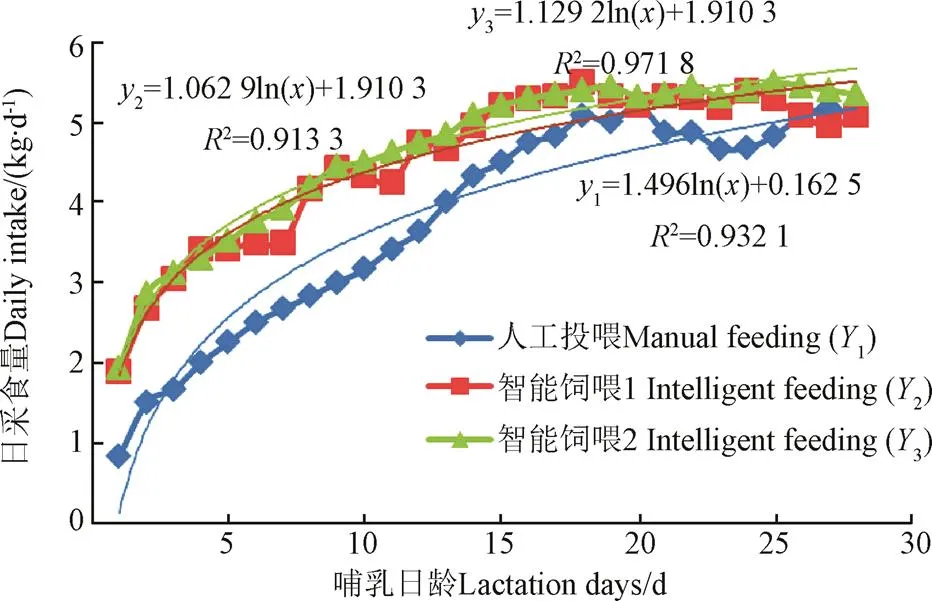
注:智能饲喂方式1为30%、25%、25%及20%,方式2为30%、20%、20%、30%。
从图5可以发现,采用人工喂料的采食量总体上低于智能饲喂模式。在整个试验期间,人工喂料采用逐渐增料的方式,直至达到最大量5 kg左右,但采用设备饲喂的母猪采食情况总体上好于对照组,尽管最大采食量与人工饲喂没有差异。具体而言,人工喂料日均采食量为3.80 kg,而智能饲喂的日均采食量方式1(30%、25%、25%及20%)为4.58 kg,方式2(30%、20%、20%、30%)为4.65 kg,数据表明,2种智能化饲喂方式明显促进了采食量的改善。进一步,在3种饲喂方式下,采食量总体趋势都呈现逐渐增加的趋势,但在局部上还是出现较大波动,可能与猪舍的环境平均温度较高有关。尽管如此,对采食量数据进行模拟,均收敛于对数曲线,且拟合曲线的相关系数(2)均大于0.90,表明用对数曲线较好反映哺乳母猪的采食规律。最后,就2种智能饲喂方式而言,后者的平均采食量略好于方式1,日均采食量高出70 g,若按哺乳期为21 d及28 d分别计算,哺乳期可累计多采食大约1.47和1.96 kg,表明改变饲喂时间间隔及改变饲喂量比例更加符合哺乳母猪的采食行为特性,进一步验证了Sulabo等[24]总结的针对哺乳母猪的教槽料饲喂策略。此外,本试验结果与熊本海等[6]研制的第一代哺乳母猪饲喂系统相比,进一步最大化了哺乳母猪采食量。而Goodband等[25-26]报道了提高哺乳母猪的采食量可提高产仔率、缩短从断奶到发情的间隔,Dtitz等[27-29]报道了下一胎次的繁殖率与本胎次生产性能的关系,反映了为哺乳母猪提供充足养分的必要性。此外,Clowes等[30]研究发现因哺乳母猪采食量下降导致幼仔的生长缓慢、卵巢功能退化,进一步引起选择性的蛋白质损失。因此,不论是对仔猪的发育,还是母猪自身繁殖性能的维护,保证哺乳期间足够的采食量是至关重要的。
3 结 论
1)设计了一种通过容积的改变实现精准下料的哺乳母猪饲喂控制设备。该设备精准下料的关键在于电动推杆的速率、行程及电源的输出电压的协同,控制下料量的稳定性,设备性能测试验证表明,推杆速率为60 mm/s;且电源输出电压为11.5 W时,下料的稳定性最好,且推杆不会卡死。
2)与传统人工饲喂的采食量比较,智能饲喂方式显著促进哺乳母猪的采食量,而且采用变饲喂时间间隔(06:00、10:00、15:00、22:00)且不同时间点的饲喂采食量比例分别为30%、20%、20%、30%时,采食量效果好于以往的、依次减少饲喂比例的投料方式,且获得较佳的采食量变化曲线。
[1] 彭健. 丹麦猪营养与管理技术及其对中国养猪业的启示[J]. 饲料工业,2016,37(21):1-8.
Peng Jian. Swine nutrition and management in Denmark and their enlightenments on Chinese pork production[J]. Feed Industry, 2016, 37(21): 1-8. (in Chinese with English abstract)
[2] 孙德林. 盘点2016猪业发展之一:总量分析[EB/OL]. (2016-12-13)[2017-06-21]. http://www.chinaswine.org.cn/grw/newshow.php?id=288.
[3] 卓创资讯. 2016年我国猪肉进口情况分析[EB/OL]. (2017-02-10)[2017-06-21] http://www.sci99.com/news/23886196.html.
[4] 王树华. 智能饲喂对群养初产母猪生产性能影响的试验研究[J]. 养猪,2014(1):78-80.
Wang Shuhua. Experimental research on the group of primiparous sow performance effect of intelligent feeding pigs[J]. Swine Production, 2014(1): 78-80. (in Chinese with English abstract)
[5] 许栋,曹建国,杨南宗. 哺乳母猪智能饲养技术在猪场中的应用研究[J]. 养猪,2016(2):87-88.
Xu Dong, Cao Jianguo, Yang Nanzong. Study on the application of intelligent feeding technique of lactating sows in pig farms[J]. Swine Production, 2016(2): 87-88. (in Chinese with English abstract)
[6] 熊本海,杨亮,曹沛,等. 哺乳母猪自动饲喂机电控制系统的优化设计及试验[J]. 农业工程学报,2014,30(20):28-33.
Xiong Benhai, Yang Liang, Cao Pei, et al. Optimal design and test of electromechanical control system of automatic feeder for nursing sow[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(20): 28-33. (in Chinese with English abstract)
[7] Gestalt Solo. Computerizedfeeding system for farrowing sows[EB/OL].(2015-10-15)[2017-06-21].http://jygatech.com/
products/gestal-solo-2/
[8] Nedapvelos. Chinese sow farms install Nedap VelosESF [EB/OL]. (2008-11-04)[2017-06-21]. http://www.pigprogress.net/Home/General/2008/11/Chinese-sow-farms-install-Nedap-Velos-ESF-PP002261W/.
[9] 博亚和讯网.润农哺乳母猪饲喂器荣耀首发[EB/OL]. (2014-05-22)[2017-06-21].http://www.boyar.cn/article/2014/05/22/557257.shtml.
[10] 成都肇元科技有限公司.哺乳母猪智能饲喂器[EB/OL]. (2016-03-12)[2017-06-21].http://www.ttzy.net.cn/index.php?_m=mod_product&_a=view&p_id=250.
[11] 华科智农.华科智农智能化饲喂系统[EB/OL]. (2015-10-20)[2017-06-21].https://wenku.baidu.com/view/c03060b6cfc789eb172dc8c8.html.
[12] 贾米娜,郭峰. 实用电动推杆[J]. 机械管理开发,2006 (2):58-59.
Jia Mina, Guo Feng. Practical electromotive handspike[J].Mechanical Management and Development, 2006(2): 58-59. (in Chinese with English abstract)
[13] 蒋炜,马维华. LPC1766与SI4432的无线数据传输系统设计[J]. 单片机与嵌入式系统应用,2013(1):31-33.
Jiang Wei, Ma Weihua. Wireless data transmission system based on LPC1766 and Si4432[J]. Microcontrollers & Embedded Systems, 2013(1): 31-33. (in Chinese with English abstract)
[14] Barn Schwartz, Peter Zaitsev, Vadim Tkachenko著,宁海元,周振兴,彭立勋,等译. 高性能MySQL[M]. 北京:电子工业出版社,2013.
[15] 北京阿博泰克北大青鸟信息技术有限公司编著. NET平台和C#编程[M]. 北京:科学技术文献出版社,2006.
[16] National Research Council(NRC). Nutrient Requirements of Swine[M].10th ed. Washington, DC: National Academic Science, 1998.
[17] 连瑞营,郭富豪,张莹莹.不同饲喂次数对哺乳母猪生产性能及营养物质消化率的影响[J]. 现代畜牧兽医,2010(11):50-52. Lian Ruiying, Guo Fuhao, Zhang Yingying. Effects of different feeding times on performance and nutrient digestibility of lactating sows[J]. Modern Journal of Animal Husbandry and Veterinary Medicine, 2010(11): 50-52. (in Chinese with English abstract)
[18] 江书忠,燕富永,肖淑华. 提高高产哺乳母猪营养摄入的新思路[J]. 今日养猪业,2015(7):91-93.
Jiang Shuzhong, Yan Fuyong, Xiao Shuhua. New ideas for increasing nutrient intake in high yield lactating sows[J]. Pig Industry Today, 2015(7): 91-93. (in Chinese with English abstract)
[19] 中华人民共和国农业部. 猪饲养标准:NY/T 65-2004[R]. 2004.
[20] National Research Council(NRC). Nutrient Requirements of Swine[M]. 11th ed. Washington, DC: National Academic Science, 2012.
[21] 熊本海,罗清尧,赵峰,等. 中国饲料成分及营养价值表(第26版)制订说明[J]. 中国饲料,2015,21:23-33.
Xiong Benhai, Luo Qingyao, Zhao Feng. Modification explaining on Chinese feed composition and nutritive value tables (2016’ the twenty-seventh Edition)[J]. China Feed, 2016, 21: 23-33. (in Chinese with English abstract)
[22] 熊本海,罗清尧,赵峰.中国饲料成分及营养价值表(2016年第27版)制订说明[J]. 中国饲料,2016,21:33-43.
Xiong Benhai, Luo Qingyao, Zhao Feng. Modification explaining on Chinese feed composition and nutritive value tables (2016’ the twenty-seventh Edition)[J].China Feed, 2016, 21:33-43. (in Chinese with English abstract)
[23] Evonik Nutrition, Care Gmb H. AMINO Dat®5.0.–Animal nutritionist’s information Edge[M]. Evonik Industries, 2016.
[24] Sulabo RC, Jacela J Y, Tokach M D, et al. Effects of lactation feed intake and creep feeding on sow and piglet performance[J]. Journal of Animal Science, 2010, 88(9): 3145-3153.
[25] Goodband B, DeRouchey J, Tokach M, et al. Nutritional Considerations for Optimizing Reproductive Efficiency[M]// K-State Research and Extention. Department of Animal Sciences and Industry, Kansas State University, Manhattan K S, USA, 2006.
[26] Portocarero Khan N. Maximising sow feed intake: Effective tool for lactation management[J]. Kraftfutter, 2006, 89(6): 26-29.
[27] Dritz S S, Tokach M D, Goodband R D, et al. Feeding management during sow lactation[J]. Compendium, 2000, 22(9): 126-130.
[28] Lawlor P G, Lynch P B, Caffrey P J, et al. Effect of pre- and post-weaning management on subsequent pig performance to slaughter and carcass quality[J]. Anim Sci, 2002, 75: 245-256.
[29] Callesen J, Halas D, Thorup F, et al. The influence of nutritional and management factors on piglet weight gain to weaning in a commercial herd in Denmark[J]. Livest Sci, 2007, 108: 117-119.
[30] Clowes E J, Aherne F X, Foxcroft G R, et al. Selective protein loss in lactation sows is associated with reduced litter growth and ovarian function[J]. Journal of Animal Science, 2003, 81: 753-764.
Design and test of precise blanking control system for lactating sows
Xiong Benhai1, Yang Liang1, Zheng Shanshan1, Cao Pei2, Pan Xiaohua1, Wu Guotao2
(1100193; 2453500)
In order to meet the maximum feed intake of lactating sows and achieve accurate feeding control requirements, a new generation of automatic feeding control system of lactating sows was designed in this study. The automatic feeding control system consisted of control panel, storage bin, quantitative bin, ejector retainer plate, linear actuator, buffer spring, upper blocking ball, subjacent blocking ball and connector between feed delivery tube and storage bin. In terms of control panel, the main components included microprocessor chip, commands input circuits, data communication circuits, data storage circuits, data display and external drive circuits. The form of stack data was applied in data storage system, and all feeding data in two months can be stored in this system under the situation that pigs were fed four times a day. Besides, the combination of the electric push rod and control panel constituted the upper part of storage bin; the loading feeder system and unloading equipment were connected by the upper part of storage bin; the main body of storage bin (cylindrical and inverted cone section) and quantitative bin were coordinated by electric push rod to unload feed. Through this design, the feed system was compact, energy saving, less feed loss and easy maintenance, which is in line with the development trend of intelligent agricultural machine. To obtain a stable discharge of feed by this system, the control of linear actuator’s operating rate, and the coordination between input voltage and power was studied. In addition, the accurate feeding amount to lactating sows was realized by using the preset individual feed intake model and the precise control technology on variable volume. The results showed that: 1) the feed discharge control system mainly consisted of the quantitative feed bin, linear actuator, the upper plugging ball and down plugging ball, and the embedded control system. 2) The feed discharge stability test showed that starting voltage of linear actuator varied slightly and the precise of feed discharge amount wasn’t affected when the electric power supply was 150 W. Besides, when the electric push rod rate was 60 mm/s, the input voltage was 11.5 V, the feed discharge was more precise and stable (<0.001, CV=3.526%). 3) The preset feed intake curve was consistent with the feeding characteristics of lactating sows, and the feed intake curve was converged to the logarithm curve (²=0.9609). 4) Compared with artificial feeding, the automatic intelligent feeding system improved feed intake of sows when the feeding curves was preset and feeding frequency was four times per day. The maximum of feed intake was achieved when sows were fed at different feeding time interval (06:00, 10:00, 15:00 and 22:00) and different amount of feed (30%, 20%, 20%, and 30% for each feeding, respectively) in a day. In conclusion, the new generation of automatic feeding system integrated the linear actuator equipment and embedded control system, and it had the advantages of easy operation for farms, accurate and stable feed discharge, and lower cost compared with imported equipment and traditional equipment with auger delivery. Therefore, the automatic feeding control systems suitable for popularization and application in the big, medium and small pig farms in our country.
control systems; design; embedded systems; nursing sow; linear actuator; feed intake
10.11975/j.issn.1002-6819.2017.20.022
S225
A
1002-6819(2017)-20-0177-06
2017-06-21
2017-09-11
国家“十三五”重点研发课题(2017YFD0701604,2016YFD0700205);北京市重大科技计划项目课题(D171100000417002)
熊本海,湖北红安人,研究员,博士生导师,长期从事饲料动物营养及畜牧业信息技术研究。Email:xiongbenhai@caas.cn
熊本海,杨 亮,郑姗姗,曹 沛,潘晓花,吴郭涛. 哺乳母猪精准饲喂下料控制系统的设计与试验[J]. 农业工程学报,2017,33(20):177-182. doi:10.11975/j.issn.1002-6819.2017.20.022 http://www.tcsae.org
Xiong Benhai, Yang Liang, Zheng Shanshan, Cao Pei, Pan Xiaohua, Wu Guotao. Design and test of precise blanking control system for lactating sows[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(20): 177-182. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.20.022 http://www.tcsae.org
