基于正交误差对准的MEMS陀螺测控电路设计*
2017-11-10陈华来强涛郭桂良郭江飞韩荆宇
陈华,来强涛,郭桂良†,郭江飞,韩荆宇
(1.中国科学院微电子研究所,北京 100029; 2.中国科学院大学,北京 100049)
基于正交误差对准的MEMS陀螺测控电路设计*
陈华1,2,来强涛1,郭桂良1†,郭江飞1,韩荆宇1
(1.中国科学院微电子研究所,北京 100029; 2.中国科学院大学,北京 100049)
传统MEMS(Micro-Electro-Mechanical System)陀螺的相干检测基于驱动位移和科氏位移的相位关系,依赖于陀螺的工作模式,解调载波相位抖动大,不易相位对准.为解决此问题,本文提出了一种基于正交误差对准的不依赖陀螺工作模式的相干解调系统.解调载波取自驱动电路的PLL(Phase-Locked Loop)输出,相位抖动小,仅作载波使用,不代表驱动位移信息.检测通路插入移相器,使正交误差相位滞后解调载波90°,则科氏位移信号与解调载波同相,完成检测.为验证该方法,本文研究了陀螺器件与接口电路之间的信号传递特性并进行建模,设计了锁相环、C/V(Capacitance/Voltage)转换、移相器等核心电路,实现了一款完整的MEMS陀螺测控电路.测试结果表明:陀螺驱动正常,检测正确,刻度因数为1.415 mV/(°.s),零偏不稳定度为108 °/h.结果验证了该检测方法的有效性,并为后续进一步提升性能提供了基础.该检测方法也适用于其他振动式MEMS陀螺的测控系统.
相干检测; 正交误差; 读出系统; 陀螺; MEMS传感器
相对于传统陀螺仪,硅MEMS陀螺具有低成本、小尺寸、低功耗和高可靠性等优势,在消费电子、汽车、工业控制及国防军事等领域有着广泛的应用[1-2].近年来,随着研究的不断深入,MEMS陀螺性能已逼近惯导级[3-5],并且成功地应用于惯性测量单元中[6-8].由于加工误差等非理想因素,陀螺驱动模态和检测模态之间存在比较严重的弹性耦合,使得在没有输入角速度时,检测模态仍然有较大的正交误差输出.为抵抗各种扰动,陀螺一般工作于低通区而非模态匹配区,这就造成科氏信号极其微弱.为了有效地检测科氏信号,文献[9-11]做了正交误差消除工作,然后尽可能地将科氏信号放大,提升机械信噪比.消除正交误差的方法有:在驱动方向设计校准梳指;在检测方向的检测电极上施加校准力;对检测方向的输出电学信号进行补偿.后两种方法会引入噪声,污染检测梳齿上的微弱科氏信号,所以高性能陀螺一般采用第一种方法.而本文研究对象由其他单位提供,没有设计正交误差校正梳指,所以本文要探索在正交误差存在时怎样将微弱的科氏信号较好地检测出来.
文献[12]利用正交误差进行模态匹配,然后采用相干解调法提取科氏信号,取得了优异性能;文献[13]利用正交误差将科氏信号的幅度信息转化为相位信息,然后数字化相干解调来检测科氏信号.本文利用驱动电路锁相环的输出作为载波,再利用正交误差作为指示,通过调节检测通路的移相器,使得正交误差的相位滞后载波90°,从而实现科氏信号与载波同相,完成解调.该检测方法不依赖于两模态谐振频率之间的关系,即不依赖于陀螺的工作模式,都能实现良好检测.这一新的检测方法通过板级电路得以有效验证.实验结果良好,陀螺刻度因数为1.415 mV/(°·s),零偏不稳定度为108°/h.本文组织如下:首先介绍研究对象及正交误差;然后介绍提出的新检测方法并给出总体测控电路;接下来介绍驱动电路和检测电路的关键模块设计;最后进行测试并给出结论.
1 MEMS陀螺器件及正交误差
陀螺器件采用静电驱动、电容检测方式工作,驱动模态的电极采用梳指电容结构,检测模态的电极采用变间距的平板电容结构,如图1(a)所示.器件采用真空晶圆级封装,驱动模态Q值高达220 000.为降低刚度温度系数和自身能量损耗,结构材料选用单晶硅.驱动模态的梳指结构可使驱动力线性,检测电流线性;检测模态的平板电容结构可使机械灵敏度更大[14].
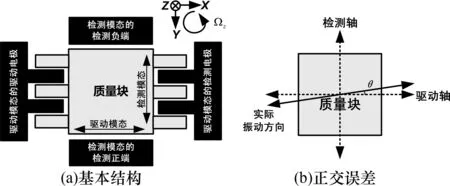
图1 振动式MEMS陀螺
由于器件材料使用单晶硅,再加上工艺制作的精度误差,使得陀螺存在比较大的弹性各向异性.驱动模态的振动轨迹会偏离驱动轴一个角度θ,从而在检测模态下产生输出,这就是正交误差,如图1(b)所示.考虑弹性各向异性,陀螺的运动学方程为:
(1)
由于检测模态的振动位移y很小,则驱动模态的寄生力kxyy可忽略,驱动模态的运动学方程不受影响.而驱动模态的位移幅值比较大,则检测模态的寄生力kyxx不可忽略,则检测模态的运动学方程为
(2)
若驱动模态稳频稳幅地振荡,x=Asin(ωdt),则检测模态的科氏力为Fcor=2mΩzAωdsin(ωdt-π/2),正交耦合力为Fquad=kyxAsin(ωdt-π).可见正交耦合力滞后科氏力90°;相应地,正交误差也滞后科氏信号90°.基于该特性,可用相干解调来提取科氏信号,抑制正交误差,完成角速度检测.当驱动模态的谐振频率ωd小于、等于、大于检测模态的谐振频率ωs,驱动模态的位移、检测模态的位移以及正交误差之间的相位关系[14]如表1所示.
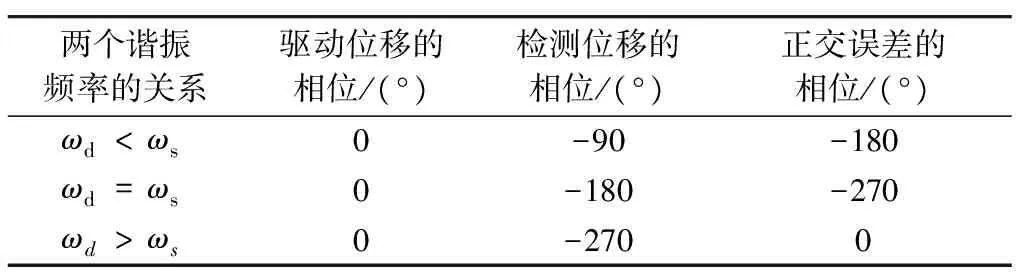
表1 驱动位移、检测位移和正交误差的相位关系
2 提出的检测方法及整体测控电路
在不消除正交误差时,可用相干解调法进行检测[14],但需要进行精确的相位对准,否则解调效果不理想.精确的相位对准需要注意两点:一是参考载波的相位抖动必须很小,二是进入解调器的两路信号的相位差必须得到有效控制.对于第一点,文献[15-17]将驱动环路的跨阻放大器的输出引出,经过比较器,整形成矩形波,作为载波使用,如图2(a).虽然经过比较器整形,但载波的抖动还是比较大,相位对准效果不佳.本文采用文献[18]的做法,将闭环锁相驱动的PLL输出作为载波,如图2(b).由于PLL相当于一个高Q值的窄带带通滤波器,可以对跨阻放大器的输出信号进行滤波去噪,因此该载波的相位抖动小,是理想的解调载波.对于第二点,传统的相位对准是基于驱动位移、检测位移(科氏位移)、正交耦合误差三者间的相位关系来实现.一种方法是让驱动位移和检测位移的相位同相;另一种方法是让驱动位移和正交耦合误差的相位正交.本文提出了一个新的相位对准方法,在相干解调器前面插入一个移相器,在陀螺静止时,通过调控移相器的相位,使得正交误差的相位滞后解调载波90°,这样当陀螺工作时,科氏信号就与解调载波同相,完成检测.
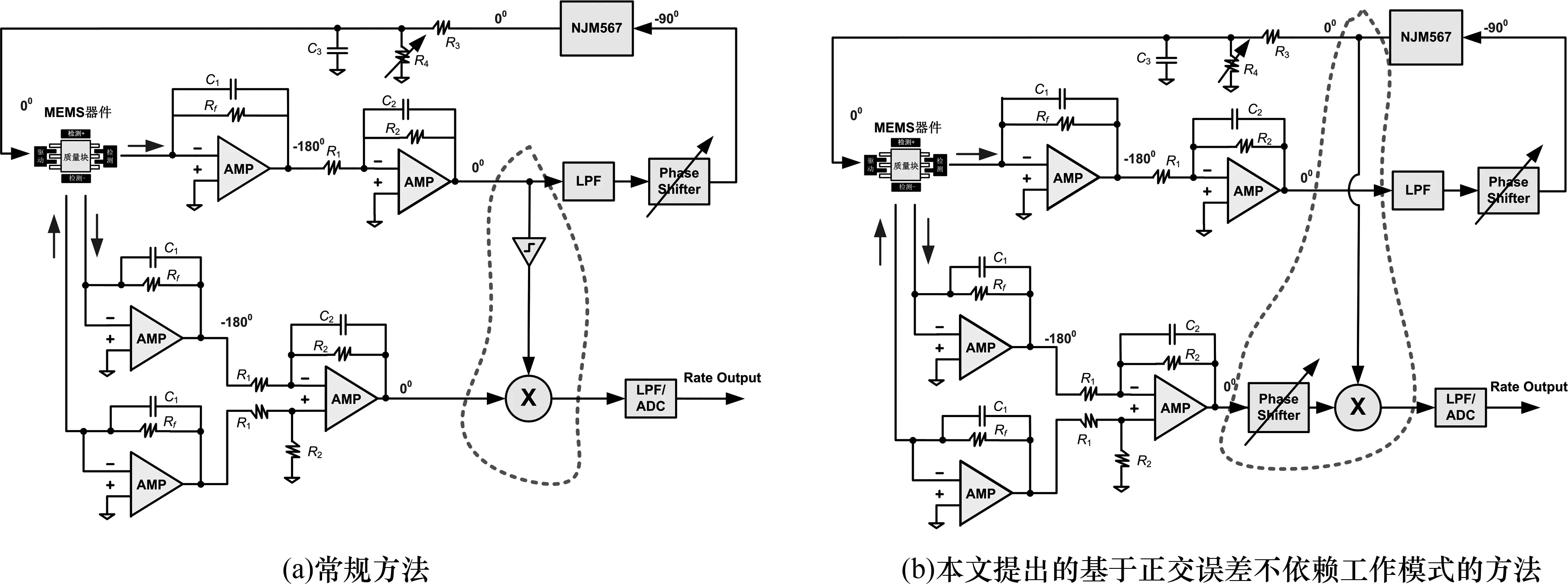
图2 MEMS陀螺整体解调系统
这种检测方法关键在于:1)解调载波来自驱动环路,这样就能保证科氏信号、正交误差和解调载波具有相同的工作频率.2)解调载波取自PLL的输出.该信号干净、相位抖动小、仅仅作为载波使用,不用考虑其是否代表驱动位移信息.3)通过调控移相器,使得陀螺静态输出的正交误差滞后载波90°,而根据科氏信号始终超前正交误差90°这一恒定条件,因此,科氏信号就自然而然与载波同相了.该方法不用管驱动模态频率大于、等于或小于检测模态频率,都可以完成检测,具有简单、高效等优点.
整体的测控电路如图2(b),由闭环驱动电路和开环检测电路组成.驱动电路采用锁相环技术以实现持续性的频率跟踪,降低驱动频率抖动[19-21],并且提供低相位抖动的解调载波:检测电路使用不依赖陀螺工作模式的新型相干解调技术,基于正交误差进行相位对准,实现高效检测.为降低ADC引入的量化噪声,采用12 bit ADC进行数字输出.PLL在锁定时输出相位超前输入90°,因此在驱动环路中需要加移相器,进行滞后移相,使闭环驱动满足正反馈条件.相比较于开关电容技术和电荷放大器技术,跨阻放大器技术具有低功耗、低噪声、低容性负载等优点,所以本文采用跨阻放大器作为驱动和检测模态的C/V转换.
在检测模态采用双边差分检测方案[22],不过与文献[22]不同的是,公共动极板上不加调制载波,而加直流电压VP,可避免调制载波对检测模态微弱信号的污染,而且还可避免二次解调的检测复杂性.将跨阻放大器的正端接地,使检测模态的固定极板虚地,从而降低器件内部的寄生电容,降低耦合信号的幅度.后级差分放大器对两个跨阻放大器的输出做差、反相、并放大.
3 闭环驱动设计
3.1 器件与驱动电路的接口特性
MEMS陀螺器件属于力学域,外围驱动电路属于电学域,因此信号在两者间会有多次能量转换.为保证驱动电路设计的正确性,首先需要研究器件和电路之间的信号转换,并推导传输函数模型,给出确切的相位关系.
假定施加在质量块上的极化电压为VP,驱动电极的梳指电容为Cd,检测电极的梳指电容为Cs,跨阻放大器的跨阻值为RF.若在驱动电极上施加一个交变的激励电压
Vact(t)=vdsin(ωdt)
(3)
则质量块受到的交变的静电驱动力为
(4)
在此静电力作用下,质量块的运动位移为

(5)
在检测电极,质量块的位移导致梳指电容的变化,电容变化量为

(6)
电容电压为VP,则变化电容向器件外输出的电流为
(7)
经过跨导放大器,电流转换成电压
Vsen(t)=-isen(t)RF
(8)
至此,完成了从激励电压到检测电压的整个推导过程,获得了相应的信号转换表达式.将表达式写成传输函数,就可以得到驱动模态的接口传输函数模型,如图3所示.由图可知,输出的检测电压Vsen与激励电压Vact同频反相.如果器件外部再加一级反相,及合适的增益,闭环,即可实现振荡.

图3 驱动模态从激励到检测的整体传输函数模型
Fig.3 Total transfer function model of drive-mode from actuation voltage to sense voltage
3.2 关键模块——PLL设计
本设计基于芯片NJM567进行[23],芯片内部结构及应用开发如图4所示.流控振荡器的中心频率由可变电阻R1和固定电容C1设定,其可调频率范围为0.01 Hz~500 kHz.锁相环PLL由鉴相器、环路低通滤波器、放大器和流控振荡器组成.管脚5为PLL方波输出口,管脚6为PLL三角波输出口.为了给检测通路的混频器提供载波,需要精确对准相位,所以PLL输出口从管脚5引出,其直流电压为VDD/2,幅度为VDD-1.4V,该端口可驱动1 kΩ电阻.锁定时,PLL输出超前输入90°.

图4 PLL芯片内部结构和外围电路
无输入信号(自由振荡)时,PLL中心频率计算式为f0=1/(1.07R1C1).已知器件的工作频率为13.48 kHz,若固定电容C1选为10 nF,则可算得可变电阻值R1为6.9 kΩ(量程为20 kΩ).PLL的最大检测带宽(捕获频率范围)为14%f0,该带宽取决于环路低通滤波器电容C2和PLL输入信号幅度,如图5所示.
图5 PLL输入信号幅度与检测带宽关系
图5展示的是以f0C2为参量,输入信号幅度与PLL检测带宽之间的关系图.当参量f0C2=1.3×103(Hz-μF),输入电压均方值大于200 mV时,PLL可获得最大检测带宽为14%f0.若f0=13.48 kHz,则C2=0.1 μF.而对于C3的取值,一般C3=2C2.
4 检测通路设计
4.1 C/V转换电路设计
由于差分检测电极都需要虚地,所以每个电极均连接一个跨阻放大器,其正相端接地.跨阻放大器的输出再被后级差分放大器做差输出.基于跨阻放大器的C/V转换电路如图6所示.
图6 检测模态的C/V转换电路
陀螺器件检测模态的电学模型等效为极化电压VP和一对差动变化的检测电容Cs.电容的变化量ΔCs对应着质量块的位移量.电容变化量在极化电压VP作用下产生输出电流is(t),其值为VP*d(ΔCs(t))/dt.
下面推导检测正端和负端的电流方向.结合图1(a),假定驱动模态的初始位移方向为X轴正向,如果此时沿Z轴负向输入角速度Ωz,则由科氏公式Fcor=-2mΩz×υx可知,科氏力方向为Y轴正向,推动质量块沿Y轴正向运动,因此检测正端电容增大,电流增大,其电流方向为从器件流向外部:相应地,检测负端的电流从外部流向器件,如图6所示.
值得指出的是,在实际工程中,由于器件的制作偏差以及质量块的位移偏差,可能会导致检测正、负端电流大小不完全相等.为方便起见,此处暂不讨论.
在电路方面,为抑制高频噪声和干扰,以及防止在调试过程中放大器芯片发生振荡,在反馈电阻Rf上并联一个电容C1.选取Rf=1 MΩ,C1=0.5 pF,使Rf≪1/(2πfC1),信号电流流过Rf支路,完成电流到电压的转换.跨阻放大器的输出电压为
(9)
考察低频特性(陀螺工作频率属于低频),上支路的跨阻放大器输出为vo1(t)=-is(t)*Rf,下支路的输出电压为vo2(t)=is(t)*Rf.假设后级差分放大器为理想运放,则由正相端的虚断特性,可得vp(t)=vo2(t)*R2/(R1+R2);而由负相端的虚断特性,可得vn(t)=(vo1(t)-vo(t))*R2/(R1+R2)+vo(t);再由运放输入的虚短特性,可得vn(t)≈vp(t).于是整个C/V转换电路的输出电压为
(10)
图6中电容C1和C2的作用是:1)防止芯片出现振荡; 2)与反馈电阻Rf及R2形成低通滤波器,提升放大器的输出信噪比.
4.2 移相器设计
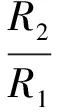
为满足相干解调器的相位对准要求,实现正交误差与解调载波的90°相位对准.该移相器要实现0°到-90°的滞后移相功能.本文采用有源移相网络,如图7,注意电阻R6反馈回运放的负相端,以形成负反馈.
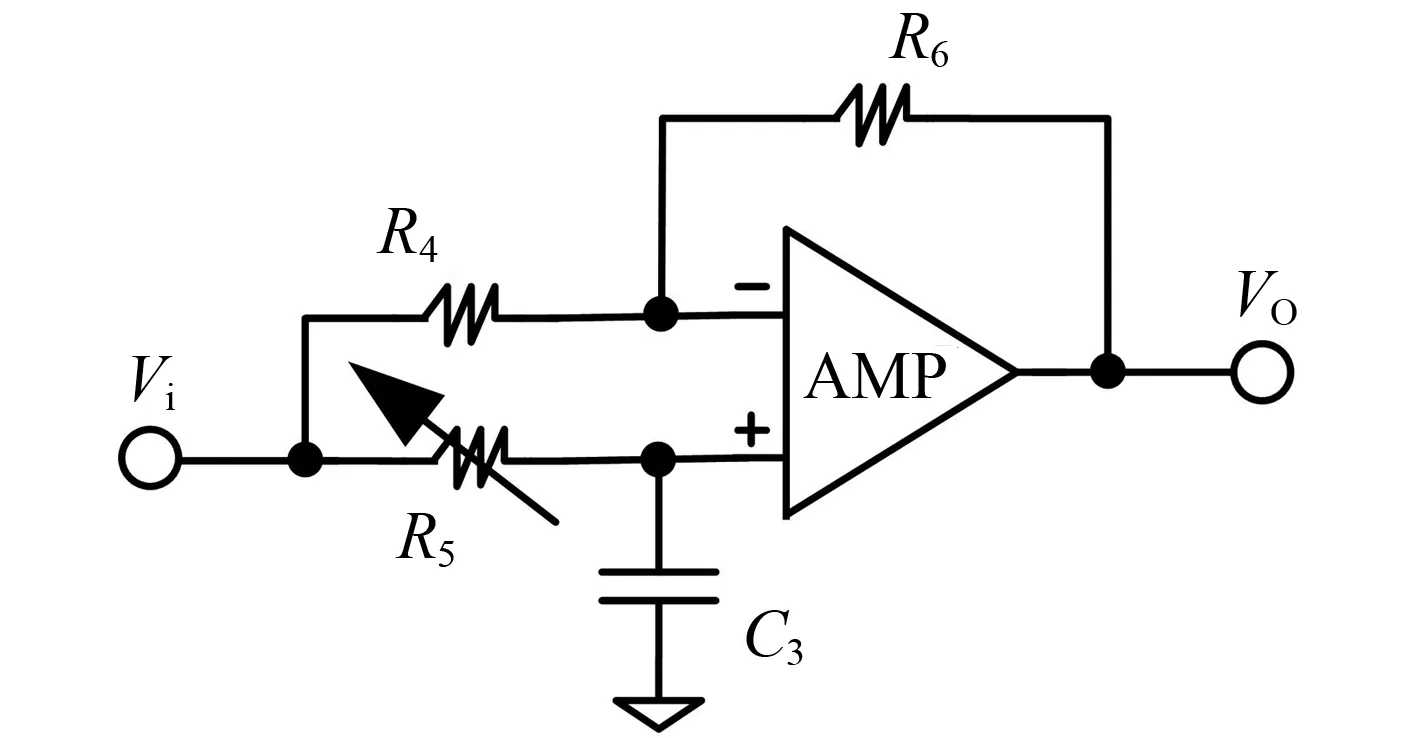
图7 移相电路
假设运放理想,利用虚断虚短特性,可得

(11)
若设计R4=R6,则整理式(11),可得传输函数

(12)
可见零极点重合.其中幅频特性恒定为1(0dB),而相频特性为:
(13)
移相电路的相频特性如图8,使用可变电阻R5,调节零极点fp,z位置,使得在工作频率13.48 kHz处的相移满足环路相位要求.若使用量程为20 kΩ的可调电阻,默认电阻值为10 kΩ,零极点频率设为15 kHz,若选取电容C3为1 nF,则R5=10.6 kΩ.根据实际应用情况,合理微调电阻值,使之达到要求.

图8 移相器电路的相频特性曲线
5 实验及测试结果
基于上述研究与分析,设计陀螺的PCB板,如图9所示.跨阻放大器的运放采用超低噪声芯片OPA656[24].为降低接口电路的总等效输入噪声电流,需要减小OPA656与MEMS器件之间的走线寄生电容[24].因此,让OPA656尽可能靠近MEMS器件,使关键走线尽可能短;同时挖掉走线附近的铺铜,进一步降低寄生电容.为降低量化噪声,采用12 bit ADC进行数字输出.为减小PLL和ADC信号对板子的污染,将PLL芯片和ADC芯片放置在PCB板的边缘.

图9 MEMS陀螺闭环驱动的板级验证系统
5.1 陀螺功能及相位对准测试
当陀螺静态时,加电源,加极化电压,调节PLL芯片的中心频率,使闭环驱动锁定.当驱动环路稳频稳幅地振荡后,在检测通路可观察到比较大的正交误差,频率为13.48 kHz,幅度为225 mV.调节检测通路的移相器,使得正交误差滞后PLL输出(解调载波)90°,如图10.该相位对准为后续陀螺的角速度检测提供了工作基础.图中,正交误差的上、下峰值处的凹陷是由于解调参考载波(矩形波大信号)通过寄生电容耦合所导致的.由于相位对准是相对正交误差的过零点进行比较,所以这些非理想性对相位对准的准确度没有影响.
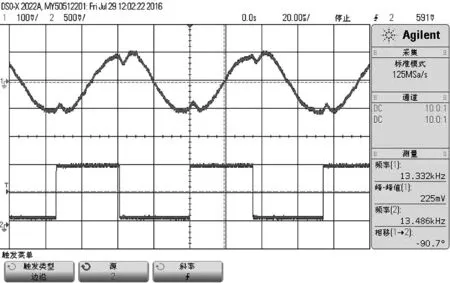
图10 正交误差和PLL输出(载波)进行90°对准
5.2 刻度因数测试
根据IEEE陀螺测试标准,采用杭州奥博生产的单轴速率温控转台SLT-01V1-100C进行测试.调整好转台,接通陀螺电源,等待半小时后,控制转台分别以0°/s,±1°/s,±2°/s,±5°/s,±10°/s,±20°/s,±50°/s,±100°/s,±150°/s(补测),±200°/s,±250°/s(补测),±300°/s的角速度进行转动.等转台工作状态稳定后,启动蓝牙传输,利用单片机及串口助手读取陀螺仪的数字化输出,每个速度点采集300个数据.由于受转台的电机等噪声因素的影响,±0.1°/s,±0.2°/s,±0.5°/s速率点无法测试.测试完成后,利用excel对每个角速度点的300个数据求平均,获得原始数据.在matlab中,采用最小平方法的一阶多项式拟合(Polyfit)方法处理原始数据,绘得在各速率点的陀螺输出,如图11.
拟合后的一阶多项式为:y= -1.16*x+2732 [LSB],由于ADC采用12 bit,输入满量程的电压范围为:0~5 V,所以1个LSB等于5000/4096= 1.22 mV.经计算,陀螺刻度因数为SF=1.415 mV(°·s).
图11 MEMS陀螺的刻度因数测量结果
5.3 零偏测试
将静止的陀螺固定好,接通电源.待陀螺的驱动模态稳定振荡后,启动蓝牙传输,利用单片机及串口助手读取陀螺仪的数字化输出,记录90 min,取中间60 min有效数据.利用National Instruments的LabVIEW软件,对60 min的零偏数据进行Allen方差分析.分别取τ=6 s,8 s,10 s,20 s,40 s,60 s,80 s,100 s,200 s,400 s,600 s,800 s,1 000 s,2 000 s进行计算Allen方差值,然后绘制出一条Allen方差曲线,即陀螺零偏曲线,如图12.由图可知,零偏不稳定度为0.03°/s= 108°/h.

图12 MEMS陀螺的零偏测试结果, 零偏不稳定度为108°/h
6 结 论
本文提出了一个不依赖陀螺工作模式的、基于正交误差对准的相干检测方法,并通过板级系统得以验证.通过详细分析驱动系统中的器件与接口的相位关系、锁相环电路,以及检测系统中的C/V读出电路、移相器电路,最终实现了一款简单、高效、高性能的MEMS陀螺测控系统.测试结果表明,陀螺驱动正常,相干检测正确:陀螺的刻度因数为1.415 mV/(°·s),陀螺的零偏不稳定度为108°/h.该相干解调对准方法也可适用其他振动式MEMS陀螺测控系统中.
[1] 赵正平.典型MEMS和可穿戴传感技术的新发展[J].微纳电子技术,2015,52(1):1-13.
ZHAO Zhengping.New developments of the typical MEMS and wearable sensor technologies [J].Micronanoelectronic Technology,2015,52(1):1-13.(In Chinese)
[2] TROADEC C.What does the future hold for MEMS? An overview of the Market & Technology Trends [EB/OL].Beijing,Bosch Seminar,2015.http://www.digitimes.com.tw/tw/B2B/Seminar/Service/download/053A409140/053A409140_86PSD 984VLFQOA9GAG5S.pdf.
[3] ASKARI S,ASADIAN M H,KAKAVAND K,etal.Vacuum sealed and getter activated MEMS quad mass gyroscope demonstrating better than 1.2 million quality factor [C]// Proceedings of the 2016 IEEE International Symposium on Inertial Sensors and Systems.Laguna Beach,CA,USA:IEEE,2016:142-143.
[4] SENKAL D,EFIMOVSKAYA A,SHKEL A M.Dual foucault pendulum gyroscope [C]// Proceedings of the 2015 18th International Conference on Solid-State Sensors,Actuators and Microsystems (TRANSDUCERS).Anchorage,AK,USA:IEEE,2015:1219-1222.
[5] SENKAL D,NG E J,HONG V,etal.Parametric drive of a toroidal MEMS rate integrating gyroscope demonstrating <20 PPM scale factor stability [C]// Proceedings of the 2015 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS).Estoril,Portugal:IEEE,2015:29-32.
[6] EFIMOVSKAYA A,LIN Y W,ANG Y,etal.On cross-talk between gyroscopes integrated on a folded MEMS IMU Cube [C]// Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS).Las Vegas,NV,USA:IEEE,2017:1142-1145.
[7] EFIMOVSKAYA A,SENKAL D,SHKEL A M.Miniature origami-like folded MEMS TIMU [C]// Proceedings of the 2015 18th International Conference on Solid-State Sensors,Actuators and Microsystems (TRANSDUCERS).Anchorage,AK,USA:IEEE,2015:584-587.
[8] EFIMOVSKAYA A,SENKAL D,ASKARI S,etal.Origami-like folded MEMS for realization of TIMU:fabrication technology and initial demonstration [C]// Proceedings of the 2015 IEEE International Symposium on Inertial Sensors and Systems (ISISS).Hapuna Beach,HI,USA:IEEE,2015:1-4.
[9] 曹慧亮,李宏生,申冲,等.双质量硅微机械陀螺仪正交校正系统设计及测试[J].中国惯性技术学报,2015,23(4):544-549.
CAO Huiliang,LI Hongsheng,SHEN Chong,etal.Design and test on quadrature error correction system of dual-mass silicon MEMS gyroscope [J].Journal of Chinese Inertial Technology,2015,23(4):544-549.(In Chinese)
[10] 倪云舫,李宏生,杨波,等.硅微陀螺正交误差直流校正设计与分析[J].中国惯性技术学报,2014,22(1):104-108.
NI Yunfang,LI Hongsheng,YANG Bo,etal.Design and analysis of a quadrature correction method using DC voltages for silicon micro-gyroscope [J].Journal of Chinese Inertial Technology,2014,22(1):104-108.(In Chinese)
[11] 曹慧亮,王玉良,石云波,等.硅微陀螺正交误差校正方案优化[J].光学精密工程,2016,24(1):134-142.
CAO Huiliang,WANG Yuliang,SHI Yunbo,etal.Optimization of quadrature error correction method for silicon MEMS gyroscope [J].Optics and Precision Engineering,2016,24(1):134-142.(In Chinese)
[12] SHARMA A,ZAMAN M F,AYAZI F.A 104-dB dynamic range transimpedance-based CMOS ASIC for tuning fork microgyroscopes [J].IEEE Journal of Solid-State Circuits,2007,42(8):1790-1802.
[13] NOROUZPOUR S A,ZAMAN M F,AYAZI F.A digital phase demodulation technique for resonant MEMS gyroscopes [J].IEEE Sensors Journal,2014,14(9):3260-3266.
[14] ACAR C,SHKEL A.MEMS vibratory gyroscopes:structural approaches to improve robustness [M].New York,USA:Springer,2009:111-139.
[15] ALPER S E,TEMIZ Y,AKIN T.A compact angular rate sensor system using a fully decoupled silicon-on-glass MEMS gyroscope [J].Journal of Microelectromechanical Systems,2008,17(6):1418-1429.
[16] SUN H,JIA K,LIU X,etal.A CMOS-MEMS gyroscope interface circuit design with high gain and low temperature dependence [J].IEEE Sensors Journal,2011,11(11):2740-2748.
[17] TAO T T,LU W G,FANG R,etal.Designing of a micromachined gyroscope system with a closed-loop DC biased interface ASIC [J].Science China Information Sciences,2014,57(10):1-13.
[18] SHARMA A,ZAMAN M F,AYAZI F.A sub-0.2 hour bias drift micromechanical silicon gyroscope with automatic CMOS mode-matching [J].IEEE Journal of Solid-State Circuits,2009,44(5):1593-1608.
[19] 刘晓为,莫冰,谭晓昀,等.基于锁相技术的微机械陀螺闭环驱动电路[J].纳米技术与精密工程,2008,6(6):458-463.
LIU Xiaowei,MO Bing,TAN Xiaoyun,etal.Closed-loop drive circuit for the micro-machined gyroscope based on the phase-locked technology [J].Nanotechnology and Precision Engineering,2008,6(6):458-463.(In Chinese)
[20] SONG J W,SONG H M,LEE Y J,etal.Design of oscillation control loop with coarse-precision mode transition for solid-state resonant gyroscope [J].IEEE Sensors Journal,2015,16(6):1-1.
[21] ROMBACH S,MARX M,NESSLER S,etal.An interface ASIC for MEMS vibratory gyroscopes with a power of 1.6 mW,92 dB DR and 0.007°/s/√Hz,noise floor over a 40 Hz band [J].IEEE Journal of Solid-State Circuits,2016,51(8):1915-1927.
[22] 钟舟,黄丽斌,杨波.硅微机械陀螺仪模拟信号检测技术研究[J].传感技术学报,2009,22(4):495-498.
ZHONG Zhou,HUANG Libin,YANG Bo.Research on analog signal detecting of silicon micro-machined gyroscope [J].Chinese Journal of Sensors and Actuators,2009,22(4):495-498.(In Chinese)
[23] New Japan Radio,Japan:NJM567 (2012) http://www.njr.com/search
[24] Texas Instruments,USA:OPA656 (2008) http://www.ti.com.cn/product/
Design of MEMS Gyroscope Interface Circuit Based on Quadrature Error Alignment
CHEN Hua1,2,LAI Qiangtao1,GUO Guiliang1,†,GUO Jiangfei1,HAN Jingyu1
(1,Institute of Microelectronics of Chinese Academy of Sciences,Beijing 100029,China; 2.University of Chinese Academy of Sciences,Beijing 100049,China)
Traditional synchronous demodulation of MEMS (Micro-Electro-Mechanical System) gyroscope is based on phase relationship of drive and sense positions. This relationship depends on the work mode of gyro. Moreover,the phase jitter of drive displacement is large,which makes the phase alignment of demodulator hard. To solve these problems,a new demodulation method based on quadrature error alignment was proposed,which is independent on work mode of gyro. Demodulator reference was extracted from PLL (Phase-locked loop) output,which has low jitter. Phase shifter of sense channel was used to delay quadrature error by 90°,compared with the reference signal. Therefore,Coriolis signal and the reference were automatically in-phase,and successful demodulation was achieved. To demonstrate this method,drive-mode and sense-mode circuits were elaborately implemented,and several critical blocks were care fully de signed. The demodulation of MEMS gyro shows that the vibration oscillation is stable and the operation of sense channel is correct. The scale factor is 1.415 mV/(°·s),and the bias instability is 108°/h. Moreover,the measurement results verify the validity of the demodulation method,providing solid foundation for further research. The method is also applicable to other vibratory MEMS gyroscopes.
coherent demodulation; quadrature error; readout systems; gyroscopes; MEMS sensors
1674-2974(2017)10-0109-08
10.16339/j.cnki.hdxbzkb.2017.10.015
2017-03-18
国家自然科学基金资助项目(61501453),National Natural Science Foundation of China(61501453).
陈华(1984-),男,湖北浠水人,中科院微电子所博士研究生
†通信联系人,E-mail:guoguiliang@ime.ac.cn
TN911.7
A