利用低空无人机摄影测量快速构建矿区线状地物信息
2017-11-07张建勇赵艳玲陈永春李文顺田帅帅
张建勇,赵艳玲,肖 武,陈永春,李文顺,田帅帅,王 鑫
(1. 中国矿业大学(北京)土地复垦与生态重建研究所,北京 100083; 2. 平安煤炭开采工程技术研究院有限公司,安徽 淮南 232001)
利用低空无人机摄影测量快速构建矿区线状地物信息
张建勇1,赵艳玲1,肖 武1,陈永春2,李文顺2,田帅帅1,王 鑫1
(1. 中国矿业大学(北京)土地复垦与生态重建研究所,北京 100083; 2. 平安煤炭开采工程技术研究院有限公司,安徽 淮南 232001)
矿区线状地物是矿山生产建设的重要部分,狭长的形态特征和有限的测量人力限制了监测工作。低空无人机摄影测量具有响应快、周期短、精度高、易操作、成本低的特点,而且获取数据内容丰富、可视性强,为矿区线状地物的快速监测提供了可能。本文选取典型高潜水位井工矿区的线状地物——以矿区专用铁路和防洪堤坝为例,设计3个相对航高(50、75、100 m)作业方案,快速构建矿区线状地物信息,评价模型结果的平面和高程精度,并检验了其可靠性,讨论了无人机摄影测量的时间与效率的权衡问题。研究表明,低空无人机摄影测量可快速获取矿区线状地物的厘米级地形信息,具有较高的平面与高程精度,平面精度可达1∶500比例尺地形图的要求,高程基本能满足1∶1000比例尺制图规范。植被覆盖对模型高程值的精度影响显著,模型内部的空间关系相对稳定可靠,经成本与效率的权衡后优选相对航高100 m为最优作业方案。矿区测绘可尝试低空无人机与传统测绘方法相结合的作业新模式,快速高效地获取监测结果。
低空无人机;摄影测量;矿区线状地物;制图精度;作业方案
矿区线状地物包括运煤公路[1]、专用铁路[2]、桥梁[3]、堤坝[4]等,往往表现为带状狭长的形态特征,是服务于矿山生产建设的重要组成部分,监测其状态与变化尤为重要。矿区线状地物通常服务于单个矿山或部分矿区生产,依靠单个矿山投入有限的人力物力来维护和监测。一般而言,监测方法采用传统的人工方法,沿线路目视巡检,或采用全站仪、水准仪和GPS等设备沿线测绘,简便易行、精确可靠,但监测数据多为点状信息且耗时耗力;传统航空摄影测量技术已在测绘制图进行过大量实践,但作业流程较复杂、成本较高;卫星遥感手段已在大尺度分析广泛应用,但绝大多数监测的是平面变化[5]。因此亟需速度快、精度高且成本低的方法来革新监测工作。新兴的低空无人机摄影测量技术具有响应快、周期短、精度高、易操作、成本低的特点,可获取区域面状信息,为快速采集目标信息提供可能[6-7]。近年来,高性能无人机平台快速发展,搭载各类传感器设备已经广泛应用于测绘行业[7-10]。
矿区线状地物的尺度较小,开采影响地表的变化显著,需低成本、多频次采集高精度数据。传统方法不能很好地满足监测需求。由于低空无人机平台操作简易、成本低廉,低空无人机摄影测量技术具有更加广泛的市场接受度,但在矿区线状地物监测方面的研究报道少见,作业精度和技术方案缺少进一步研究。因此,本文立足于矿区线状地物监测,选用低空无人机摄影测量技术,设计3个相对航高多架次的航测任务采集数据,经过摄影测量和计算机视觉结合的方法实现三维重建,快速提取矿区线状地物信息,评价和分析结果精度,为该项技术在矿区线状地物监测提供保障。
1 研究方法
1.1 研究区概况
本研究区位于安徽省淮南市淮河北岸某大型煤矿。该矿位于我国东部平原区,人口密集、地面设施众多,分布有矿区专用铁路、防洪堤坝、省级公路、乡村道路、农田干渠等各种线状地物。该矿年产1240万t,平均煤厚约20 m,具有煤层厚、分布集中和可采煤层多的特点,开采后沉陷范围广、沉陷深度大,形成大面积的积水区,是东部高潜水位矿区典型代表。本文选取该大型煤矿两条线状地物:矿区专用铁路和沉陷区新的防洪堤坝东西相邻的一段为典型研究对象,南北长约1300 m,东西宽约140 m。专用铁路为煤矸石路基,仅有极为零星的灌草植被覆盖,视为无植被覆盖区;防洪堤坝除堤坝顶为土质路面外,侧坡均种植黄豆等低矮作物、少量刚栽植的乔木和部分野草覆盖,视为植被覆盖区。矿区专用铁路用于日常煤炭运输,曾因铁路不均匀沉陷导致运煤火车侧翻的惨剧;防洪堤坝是因采煤沉陷使原有河流堤防的抗洪能力下降而新建,监测其沉陷变形量以确保周围村镇和厂矿等的安全。
1.2 无人机平台与载荷
近年来,低空无人机摄影测量的快速发展已成为卫星遥感和传统摄影测量的有效补充手段[6,11],最为常用的无人机平台有固定翼和多旋翼。由于大疆无人机的卓越性能,本研究选用四旋翼无人机DJI Matrice 100平台,以Zenmuse X3数码相机为任务载荷,主要参数有:平台最大载荷1.5 kg,最大飞行高度500 m;传感器质量247 g,尺寸6.17 mm×4.55 mm,有效像素4000×3000,焦距3.6 mm,更加详细的参数见官方网站http:∥www.dji.com/cn/matrice100。
1.3 航线设计与规划
航测数据获取于2016年8月初,当日天气晴朗且无风。经现场踏勘后,参照低空数字航空摄影规范,确定重叠度(航向80%、旁向60%),设计3个相对航高(50、75、100 m)采集影像。根据研究区的狭长分布和整体地势平坦的梯台状特征,确定无人机的起降地点在地面较高点,航线规划方向沿铁路的走向。
1.4 辅助数据获取
辅助数据主要是外业工作时布设地面控制点和检核点。地面控制点的布设考虑其狭长特征和剖面形态,尽量均匀布设,按照规范安置地面点和十字标识。坐标测量采用仪器为南方S82型RTK-GPS,接入淮南矿区CORS网,共测量25个像控点和54个检核点。
1.5 数据处理过程
运动恢复结构算法结合计算机视觉与摄影测量学原理[12],可在缺少相机检校参数和飞行姿态信息情况下,更好地将序列航测影像重建为三维模型,重构像点位置、相机内外方位元素和场景的三维模型,经地面像控点的绝对坐标实现数据校正[13],甚至可免像控达到工程制图要求[8]。许多此类软件已被研究和验证,包括Pix4D mapper和Agisoft PhotoScan等[11]。本文考虑以操作步骤简洁和算法处理优质著称的软件Pix4D mapper,选11个像控点,通过初始化处理、点云和纹理、DSM和正射影像3步,输入有限的约束条件可得高精度三维重建模型DSM和DOM,并且评价模型的精度。
2 结果分析
2.1 数据处理结果
本研究3组模型结果覆盖面积均为45 hm2,空间分辨率分别为2.4、3.6和4.7 cm;经掩模提取的最终成果如图1所示。模型结果的空间分辨率均达厘米级(优于5 cm),包含丰富的细节信息,均满足1∶500比例尺的DOM成图分辨率要求(≤5 cm)。在2 h内完成3个相对航高的多架次航空摄影,相对于Landsat TM8、SPOT 6、GF-2的重访周期16 d、4~5 d、5 d,体现了低空无人机摄影测量操作简便、重访周期短的特点;尽管传统航空摄影测量时空分辨率满足需求,但仪器设备精密、起降条件要求高等限制了其灵活应用。因此,对矿区小尺度的精准测绘而言,低空无人机摄影测量的优势是航空、航天等对地观测手段所无法比拟的。
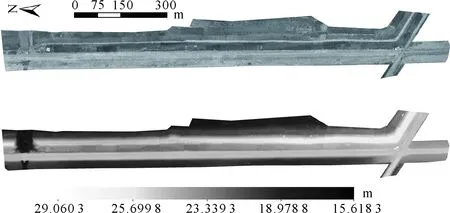
图1 数据处理结果DOM和DSM(以相对航高75 m为例)
2.2 平面精度的评价
Colomina[7]、沈永林[14]等研究表明,缺少控制点的模型误差达米级,加入控制点的模型精度显著提高,因此本文仅讨论加入控制点后的模型精度。结合常见的矿区地图比例尺,以及航摄大比例尺地形图精度与成图DOM地面分辨率的要求,本文选取其余14个像控点为平面位置真实值,分析成图分辨率、坐标误差值和均方根误差,将平面点位坐标误差按坐标对展到坐标系,如图2所示。就平面误差最值而言,3种情况的最大值为0.150 m,最小值为-0.164 m;就平面点位中误差而言,相对航高50 m的为0.105 m,相对航高75 m的为0.108 m,相对航高100 m的为0.119 m。因此,3种相对航高的结果均符合规范中1∶500比例尺的平面精度限差(≤0.175 m),本技术方法可用于大比例尺正射影像制图。
2.3 高程精度的评价
已有学者讨论了低空无人机测绘的制图精度,经三维重建的模型高程精度较差,特别是在地表覆盖为植被、水域等时候的误差显著偏大[11]。因此本研究根据植被是否覆盖划分为两类来讨论,包括植被覆盖区37个点和无植被覆盖区17个点,以RTK实测54个高程检核点进行统计和分析,结果见表1。研究表明,3个批次的点位高程中误差均小于0.28 m,满足1∶1000大比例尺制图要求(≤0.28 m)。此外,整体上无植被覆盖区(堤坝西侧)的精度优于植被覆盖区(堤坝东侧),西侧的高程点位中误差显著优于东侧,植被覆盖区的误差值均偏大。在无植被覆盖区,相对航高50 m制图可达到1∶500比例尺制图要求(≤0.15 m),另两种航高的成果可实现1∶1000及更小比例尺制图(≤0.28 m);在植被覆盖区,不能满足矿区常见比例尺的测绘精度。这佐证了已有学者的研究结论:即是由于低空无人机摄影测量获取了植被顶部的高程信息,而实际测量的是植被根部的地表高程所致。此方法在植被覆盖区的测绘制图精度不足,可考虑激光雷达等技术方法快速获取更精准的高程信息。
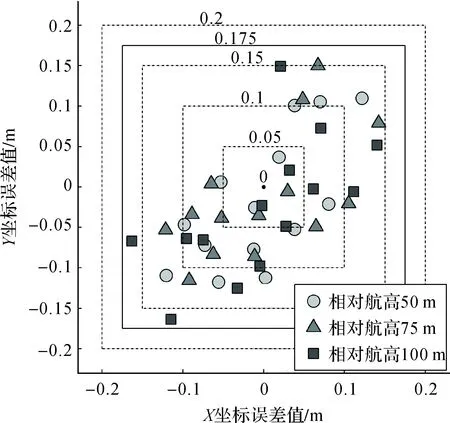
图2 平面点位坐标误差的分布

表1 高程点的误差值统计 m
2.4 模型可靠性的检验
三维模型的相对精度是讨论其精确度和准确性,计算模型内部各标识点之间的相对长度误差,以此检验模型的可靠性与稳定性[14]。本研究有实地测量的标识点14个,总共构成线段91段,计算结果如图3所示。每条线段在3个相对航高的相对长度误差幅度基本一致,均在4‰以内;且相对长度误差值分布在[-1‰,1‰]之间均在64%以上(58/91),因此模型内部的空间位置与关系相对稳定可靠。经计算上述误差值的标准差可知,相对航高75 m的模型最为可靠(标准差为0.480),相对航高50 m的模型可靠性次之(标准差为0.556),相对航高100 m的模型相对而言最差(标准差为0.592)。
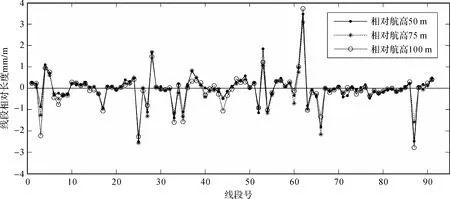
图3 模型三维重建的相对长度误差情况
2.5 成本-效率权衡分析
与传统测量方法相比,低空无人机摄影测量成果丰富,优势明显且潜力巨大。相对航高、航摄重叠度和地面控制点分布是影响精度的主要因素[15]。相对航高易于操控实施,直接影响到作业效率、空间分辨率与精度。因此,本文仅讨论最佳相对航高的作业方案,汇总了3个相对航高任务的多项信息(见表2),包括影像张数、占用内存量、外业架次、内业处理时间和空间分辨率等。随着相对航高的增大,所获取的影像数量和所占用内存显著减少,所需的外业任务架次也相应减少,内业处理时间也近乎成倍减少,而制图的空间分辨率也呈现倍数幅度的降低。外业任务应考虑低空无人机摄影运动模糊的成像问题,相对航高越低则所要求的光照条件越苛刻,以较慢速度飞行保证足够的曝光度而不致成像模糊。
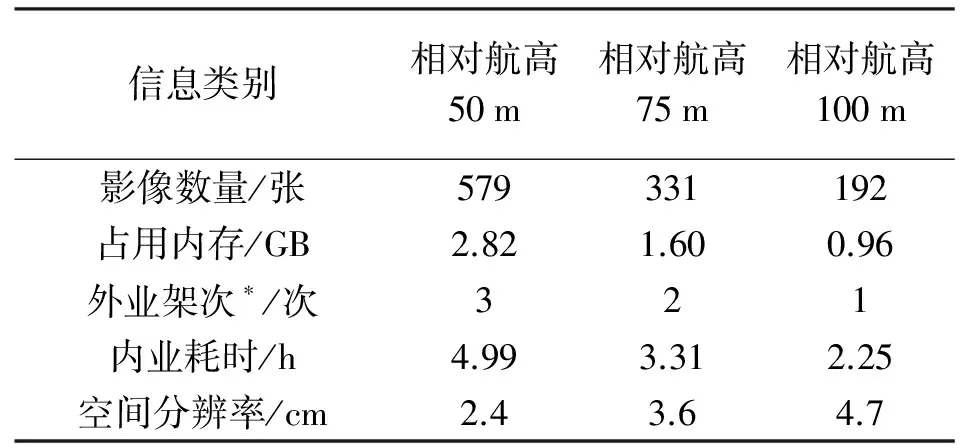
表2 不同相对航高成果信息比较
*外业任务架次以每块智能电池允许安全飞行的放电时间为限,本例为20 min/架次。
综上所述,优选100 m为最佳的相对航高,满足线状地物1∶1000测图比例尺的监测要求,能够快速完成外业和内业工作,实现快速覆盖大面积的制图需要。本研究仅连续作业几小时,即可获取45 hm2线状地物的平面与高程信息,与传统仪器的作业方式相比得到显著改善;通常矿山企业测量部门的人员少、任务重,本作业仅需要1~2名人员即可,能够极大地提升工作效率。
3 结论与讨论
本研究在分析矿区线状地物测绘问题基础上,设计3个相对航高(50 m、75 m、100 m)的低空无人机摄影测量任务,快速构建矿区线状地物信息,分别评价了模型结果的平面和高程精度,讨论了无人机摄影测量的时间与效率权衡问题,得到如下结论:
(1) 通过3个相对航高的试验方案,经运动恢复结构算法快速构建了厘米级的矿区线状地物信息,包括了大量细节信息的数字正射影像和精细地表形态的数字表面模型等,验证了此方法可行,为今后矿区线状地物的监测提供数据保障。
(2) 讨论了低空无人机摄影测量成图的平面与高程精度,与相对航高呈反相关。此方法平面制图精度可满足矿区大比例尺的要求,在无植被覆盖区可满足1∶1000及更小比例尺的高程制图规范。植被覆盖对高程精度的影响显著,有、无植被覆盖区域的高程中误差分别优于0.485、0.09 m。这为今后设计测区任务提供借鉴,为进一步提高模型精度揭示了难点。
(3) 借助少量地面控制点和无人机平台可快速构建矿区线状地物模型,且模型可靠性高。不同相对航高结果的相对线段长度误差均在[-1‰,1‰]达64%以上。
(4) 无人机摄影测量可以快速高效采集地表信息,相对航高是易于控制和改变的制图精度影响因素。经过成本和效率的权衡分析,本研究优选100 m为最佳相对航高的作业方案。
与传统作业方法相比,本方法极大地提高了作业效率,在很大程度上提高了成图精度,而且成本低、采集信息多、输出成果丰富,是矿区线状地物监测值得选用的新方法,可为快速监测提供有力的技术保障。但本研究选取的矿区线状地物南北仅长约1 km,仅讨论了3个相对航高方案,今后可针对更长地物验证更多的试验方案,以确定提高作业效率的最佳方案。本文虽然采用消费级无人机存在诸多不足之处,但可用低空无人机大面积采集地物信息,局部异常信息区辅以全站仪、激光雷达等测绘技术,实现多种方法优势紧密结合的矿区作业新模式,以实现快速、高精度地构建矿区线状地物信息,监测异常情况并及时处理的快速作业方式。
[1] 元亚菲,邓喀中,李怀展.采动期间高等级公路DInSAR监测及损害治理[J].煤炭科学技术,2014,42(5):103-106.
[2] 赵军,查剑锋.矿区地下开采对地表及铁路线影响的数值分析[J].煤矿安全,2015,46(6):220-223.
[3] 夏军武,于广云,吴侃,等.采动区桥体可靠性分析及抗变形技术研究[J].煤炭学报,2005,30(1):17-21.
[4] 王启春,贾鹏举,郭广礼,等.堤坝下矸石充填采煤充实率设计[J].煤炭科学技术,2015,43(7):40-44.
[5] 林宗坚.UAV低空航测技术研究[J].测绘科学,2011,36 (1):5-9.
[6] COLOMINA I,MOLINA P.Unmanned Aerial Systems for Photogrammetry and Remote Sensing:A Review[J].ISPRS Journal of Photogrammetry and Remote Sensing,2014,92(2):79-97.
[7] 谭仁春,李鹏鹏,文琳,等.无人机倾斜摄影的城市三维建模方法优化[J].测绘通报,2016(11):39-42.
[8] 狄桂栓,沈彪群,高波,等.免像控无人机航摄系统在公路带状地形测量中的应用与精度分析[J].测绘通报,2017(2):159-160.
[9] 吕立蕾,张卫兵,胡树林,等.低空无人机航摄系统在长距离输油(气)管道1∶2000带状地形图测绘中的应用研究[J].测绘通报,2013(4):42-45.
[10] NIETHAMMER U,JAMES M,ROTHMUND S,et al.UAV-based Remote Sensing of the Super-sauze Landslide:Evaluation and Results[J].Engineering Geology,2012,128(11):2-11.
[11] KRISTEN L C.An Evaluation of the Effectiveness of Low-cost UAVs and Structure from Motion for Geomorphic Change Detection[J].Geomorphology,2017,278(2):195-208.
[12] 薛武,张永生,赵玲,等.增量式SFM与POS辅助光束法平差精度比较[J].测绘学报,2017,46(2):198-207.
[13] SNAVELY N.Scene Reconstruction and Visualization from Internet Photo Collections[D].Washnington:University of Washnington,2008.
[14] 沈永林,刘军,吴立新,等.基于无人机影像和飞控数据的灾场重建方法研究[J].地理与地理信息科学,2011,27(6):13-17.
[15] RUZGIENE B,BERTESKA T,GECYTE S,et al.The Surface Modeling Based on UAV Photogrammetry and Qualitative Estimation[J].Measurement,2015,73(9):619-627.
RapidConstructionofMineLineInfrastructureUsingLow-altitudeUnmannedAerialVehiclePhotogrammetry
ZHANG Jianyong1,ZHAO Yanling1,XIAO Wu1,CHEN Yongchun2,LI Wenshun2,TIAN Shuaishuai1,WANG Xin1
(1. Institute of Land Reclamation and Ecological Restoration,China University of Mining and Technology (Beijing),Beijing 100083,China; 2. Ping’an Coal Mining Institute of Engineering Technology Co. Ltd.,Huainan 232001,China)
Mine line infrastructure is an important part of production and construction for mining.It is restricted to effectively monitor by elongated features and limited surveying employees.Low-altitude unmanned aerial vehicle(UAV) photogrammetry has a series of characteristics,such as rapid response,short revisit,high accuracy,easy operation and low cost,which makes it possible to rapid monitoring of mine line infrastructure.This paper takes the line infrastructure from typical high-groundwater area of underground mine as example,including special railway of mine and controlling-flood dam,designs three experiments of flying altitude (above-ground-level:50,75,100 m),rapidly rebuild the model of mine line infrastructure,evaluates both horizontal and vertical accuracy of models,tests the reliability of models,and discusses the trade-off of cost and efficiency for UAV photogrammetry.The results show that low-altitude UAV photogrammetry can effectively construct the terrain of mine line infrastructure for centimeter-level,model accuracy could meet the requirement the large scale of 1∶500 in horizontal level and 1∶1000 in vertical level,respectively.Vegetation coverage has an evident influence on elevation values of model,and spatial relation of models is reliable.It proposes that 100m of above-ground-level is an ideal choice after trade-off of cost and efficiency.Therefore,it should combine strengths of UAVs with traditional methods to provide a strong guarantee for rapid monitoring of mine line infrastructure.
low-altitude UAV;photogrammetry;mine line infrastructure; mapping accuracy;experiment program
张建勇,赵艳玲,肖武,等.利用低空无人机摄影测量快速构建矿区线状地物信息[J].测绘通报,2017(10):106-110.
10.13474/j.cnki.11-2246.2017.0325.
2017-03-05;
2017-05-26
采煤沉陷地绿色综合治理与生态修复关键技术(2016ZDJS11A02)
张建勇(1989—),男,博士生,主要从事3S集成及矿区应用研究。E-mail: zjy_xkd@126.com
P23
A
0494-0911(2017)10-0106-05