考虑间隙的空间圆柱铰多体系统运动学精度及动力学分析
2017-11-06刘太素钱林方
刘太素,钱林方,尹 强
(南京理工大学 机械工程学院,南京 210094)
考虑间隙的空间圆柱铰多体系统运动学精度及动力学分析
刘太素,钱林方,尹 强
(南京理工大学 机械工程学院,南京 210094)
为了研究空间圆柱铰间隙对系统性能的影响,针对典型的空间圆柱间隙铰结构,分析了其所有可能出现的接触模式。针对空间圆柱铰轴向和径向都存在间隙的情况,对复杂的接触模式进行了几何和运动学分析,提出一种改进的计算潜在接触点位置的方法,建立了接触碰撞力模型,将其带入多体系统动力学方程。对空间双摆进行了理想模型和间隙模型的对比分析。结果表明,由于轴向和径向间隙的存在,系统的运动学精度和动力学性能都受到了很大的影响,间隙大小的变化也会改变系统的运动学到位精度。空间圆柱间隙铰的建模方法和结果为机械结构的设计和改进提供了理论依据。
空间圆柱铰;接触模式;铰间隙;潜在接触点;多体系统
在工程实际中,由于制造、装配、磨损等原因,相对运动的铰间并不是理想的,而是存在间隙,而这些间隙是不可忽略的,间隙的存在会对机械系统的运动学精度和动力学性能产生不容忽视的影响[1-4]。
文献[5-6]分别对含有间隙的旋转铰和移动铰进行了建模分析,得出了较为通用的模型。文献[7-8]研究了柔性杆对机械系统性能的影响。文献[9]同时考虑了铰间间隙和杆的柔性,对平面四杆机构进行了运动学和动力学特性分析。文献[10-11]在铰间间隙加入润滑模型,考虑了润滑对系统动力学性能的影响。文献[12-14]研究了多种因素对带有铰间间隙的机械结构的影响,包括间隙大小、摩擦因数、输入速度等。
以上的研究都是针对平面问题进行开展,但是,在实际的机械系统在运动过程中,很多系统都是空间结构,而且有些平面系统在运动过程中也会由于角度误差变成空间问题。因此,需要建立空间间隙铰的合理模型。文献[15]针对空间球铰间隙进行了建模分析,利用一个四杆机构验证了球铰间隙对系统性能的影响。文献[16-17]建立了空间圆柱铰间隙的几何和力学模型,并进行了运动学精度和动力学特性分析。文献[18-19]利用有限单元法建立了铰间隙模型,此模型既可以运用在平面铰机构,又可以在空间铰机构使用。然而,以上空间圆柱间隙铰模型都只是考虑径向间隙对系统的影响,而没有考虑轴向间隙对结构的影响,也未考虑角度偏差的影响。基于以上原因,文献[20]利用绝对坐标系法分析了圆柱铰轴向间隙和径向间隙对空间刚柔耦合多体系统的影响,结果表明,在实际的工程问题中,很多圆柱铰结构中,轴向也会存在端盖约束轴向运动,而且有些间隙的角度也不容忽视。因此,需要同时考虑轴向间隙和角度偏差对系统的影响。
在实际的圆柱铰结构中,轴与轴套之间不仅会发生径向接触,而且在轴线方向也会存在接触碰撞,三维结构如图1所示。由于间隙的存在,轴与轴套之间不仅会相对移动,也会相对转动,转角的存在会使得接触碰撞变的更加复杂。因此,针对典型的空间圆柱间隙铰模型,本文首先对其接触模式进行分析,得出了所有的接触模式,然后通过对两个体的几何结构和运动情况进行分析,结合空间几何与矢量计算,提出一种改进的计算潜在接触点位置的方法,得到了潜在接触点的位置以及接触碰撞穿透量的计算公式,然后建立接触碰撞力模型,最后,通过运动学分析和动力学分析得出空间圆柱铰间间隙对系统运动学到位精度及其动力学性能的影响。
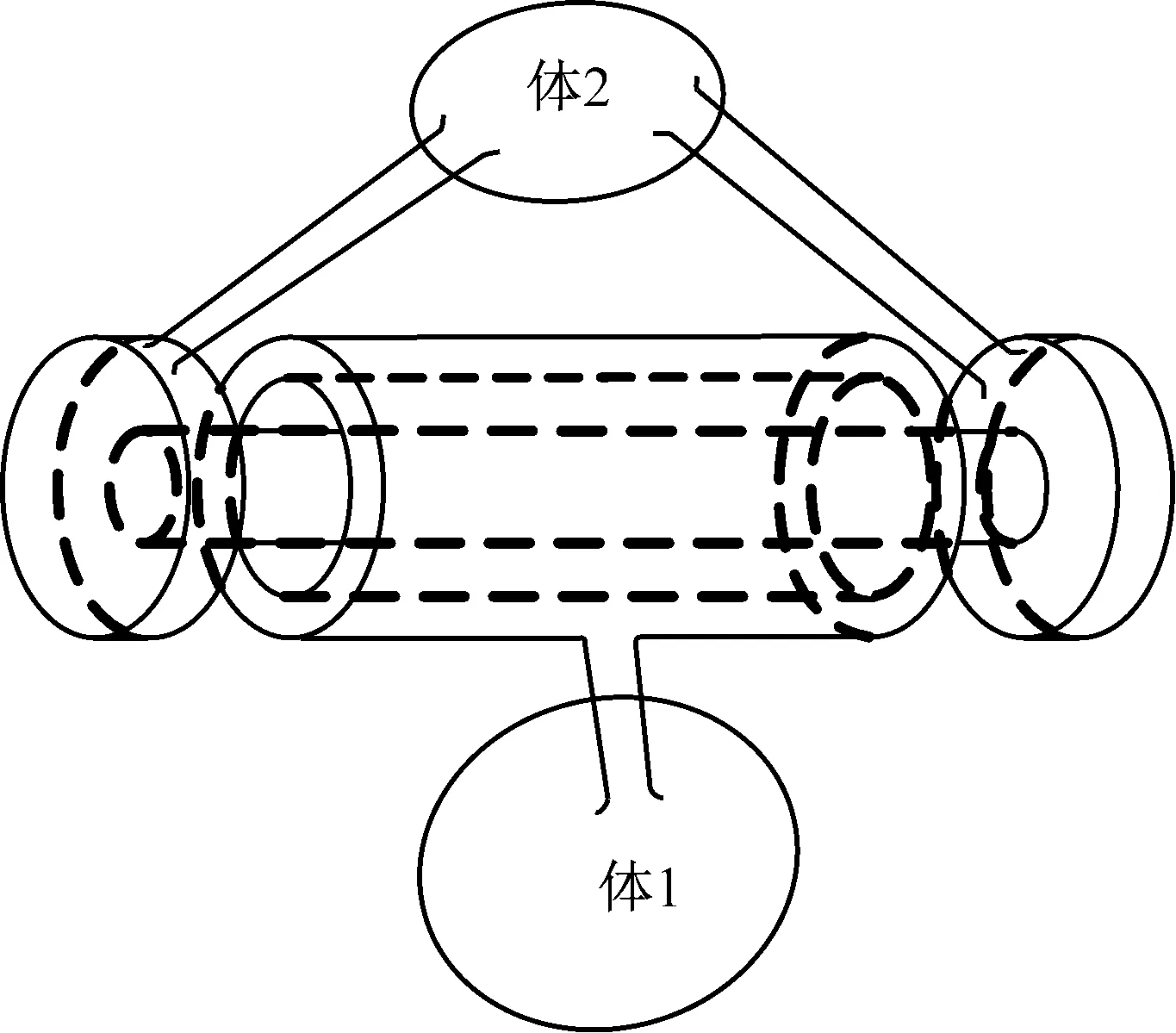
图1 空间圆柱间隙铰示意图Fig.1 Schematic diagram of spatial cylindrical joint with clearances
1 空间圆柱间隙铰几何和运动描述
1.1空间圆柱间隙铰接触模式分析
如图1所示为空间圆柱间隙铰的典型结构,体1表示轴套,体2由中间的销轴和两端的端盖组成,作为一个整体一起运动,体1与体2之间存在相对转动和相对移动,在轴向和径向都存在间隙,由于间隙的存在,体1和体2由约束状态变为拓扑可变的结构,两个体之间的运动变为两种状态,一种是自由运动状态,一种是接触状态,两个体都存在六个自由度,当两个体相对运动时,体1和体2总是在自由状态和接触状态之间切换。因此准确的分析体1与体2之间的接触模式,是正确建立间隙接触模型的基础。
针对该典型空间圆柱间隙铰结构,体1和体2之间存在多种接触模式,分析可得体1和体2之间存在如下接触模式:①自由状态,体1和体2之间无接触;②体2销轴与体1的内表面单点接触;③体2的端盖与体1的端面单点接触;④体2销轴与体1内表面线接触;⑤体2的端盖与体1端面面接触;⑥体2销轴与体1内表面线接触,同时体2端盖与体1端面面接触;⑦体2销轴与体1内表面相反的两个点接触;⑧体2两端端盖各一个点与体1端面两个点接触;⑨体2销轴上一个点与体1内表面接触,同时体2端盖一个点与体1端面接触;⑩体2销轴一个点,端盖一个点与体1两点接触;体2销轴两个点,端盖一个点与体1三点接触;体2销轴一个点,两端端盖各一个点与体1三点接触,体2销轴两个点,两端端盖各一个点与体1四点接触。以上共13种接触模式,如图2所示。
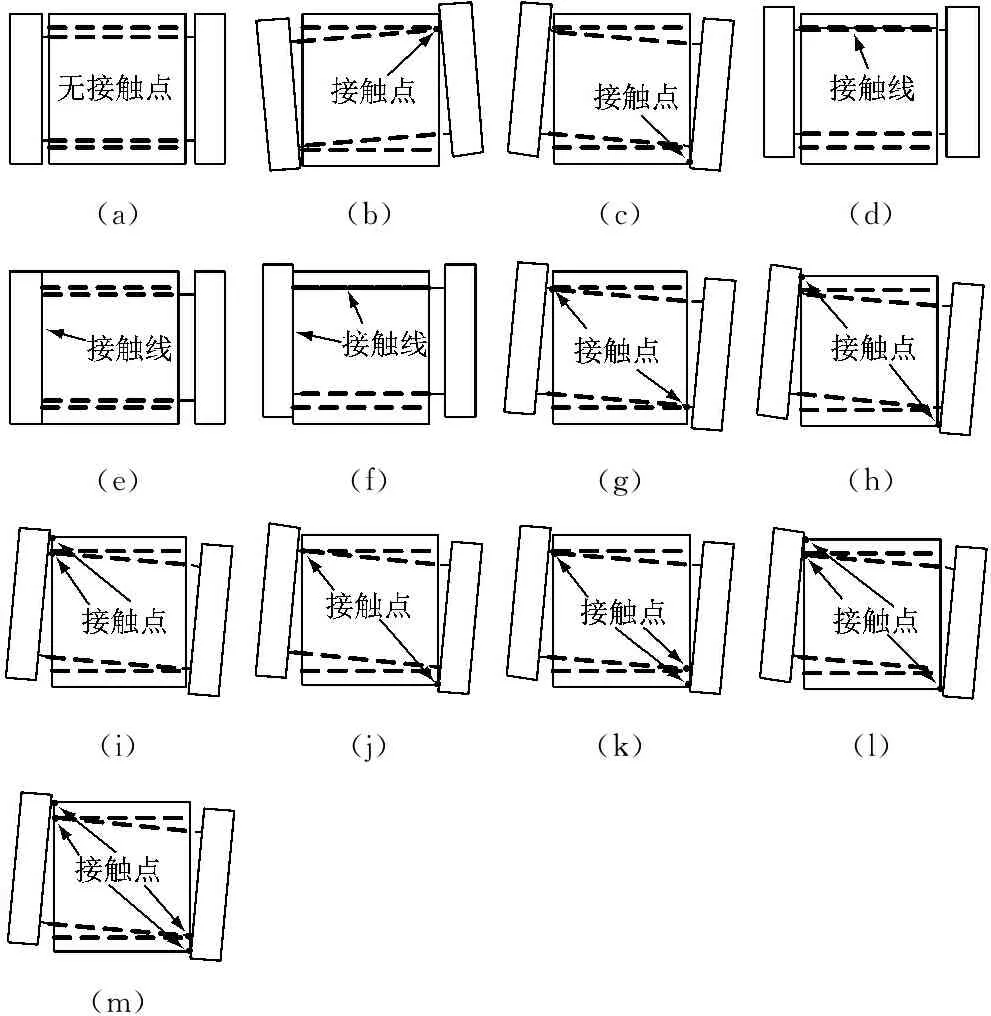
(a)(b)(c)(d)(e)(f)(g)(h)(i)(j)(k)(l)(m)
在相对运动过程中,根据几何结构和运动状态,以上接触模式都有可能出现,或者在几种接触模式之间切换。对以上接触模式进行分析,找出体1和体2的潜在接触点,才能够建立正确的接触碰撞力模型。
1.2空间圆柱间隙铰几何和运动分析
首先建立全局坐标系和连体坐标系,如图3所示。其中,O-XYZ为全局坐标系,O1-X1Y1Z1为体1的连体坐标系,O2-X2Y2Z2为体2的连体坐标系。在体1两端面的圆心处建立两个点J和K,在体2的销轴两端面圆心处建立两个点C和D。R1和R2分别为体1轴套内圆半径和外圆半径,R3和R4分别为体2销轴半径和端盖半径,O1和O2分别为体1和体2的质心位置。
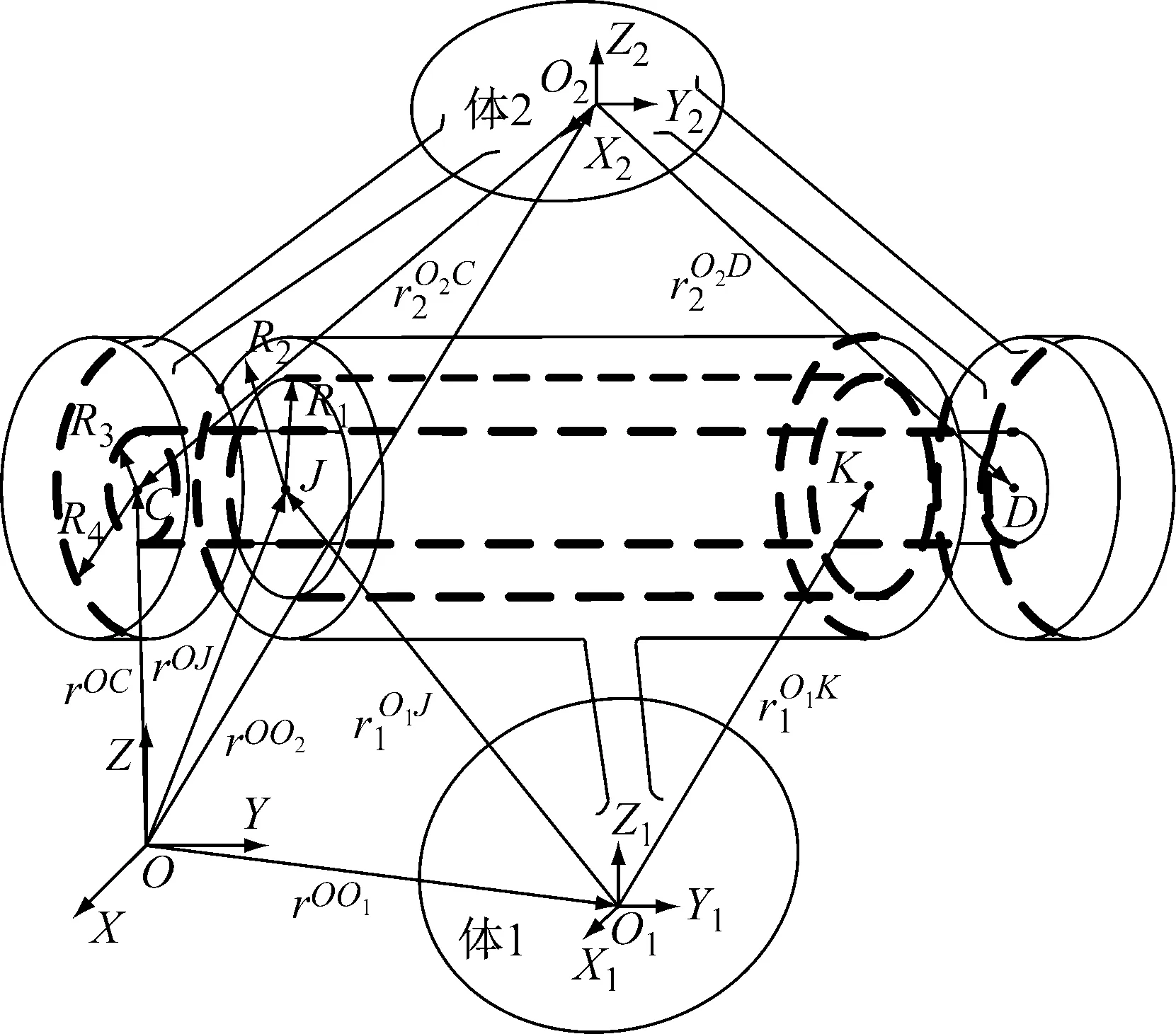
图3 空间圆柱间隙铰几何结构及坐标系图Fig.3 Geometry structure and coordinate system of spatial cylindrical joint with clearances

其中,LCD和LJK分别为销轴长度和轴套长度。
综合分析以上接触模式,可以得出接触碰撞总是发生在轴套的端面上,其中体1轴套与体2销轴的接触碰撞发生在轴套端面的内圆上,体1轴套与体2端盖的接触碰撞发生在体1轴套端面外圆上。在两个体相对运动过程中,接触模式最复杂的为如图2中的最后一种,最后一种接触模式中四个接触对可能同时存在,也可能出现其中的某几个接触对,因此,对最后一种接触模式进行分析,假设四个接触对都可能发生,可以概括前面所有的接触模式。
确定全局坐标系和局部坐标系后,点的坐标就可以分别在全局坐标系、局部坐标系1和局部坐标系2中表示,则点C和点J在全局坐标系中表示为
(1)
(2)

同理可得点D和点K在全局坐标系中表示为
(3)
(4)
当体1和体2发生相对运动时,局部坐标系也跟着体一起运动,两个体之间存在四个潜在接触对,如图2(m)所示。设体2销轴与体1轴套端面内圆的接触点分别为点G和点H,体2端盖与体1轴套端面外圆的接触点分别为点P和Q,前视图如图4所示,假设体1相对静止,体2相对体1运动,则点C和D在局部坐标系1中表示为
(5)
(6)
(7)
(8)
式中,B1为局部坐标系2对局部坐标系1的坐标变换矩阵。
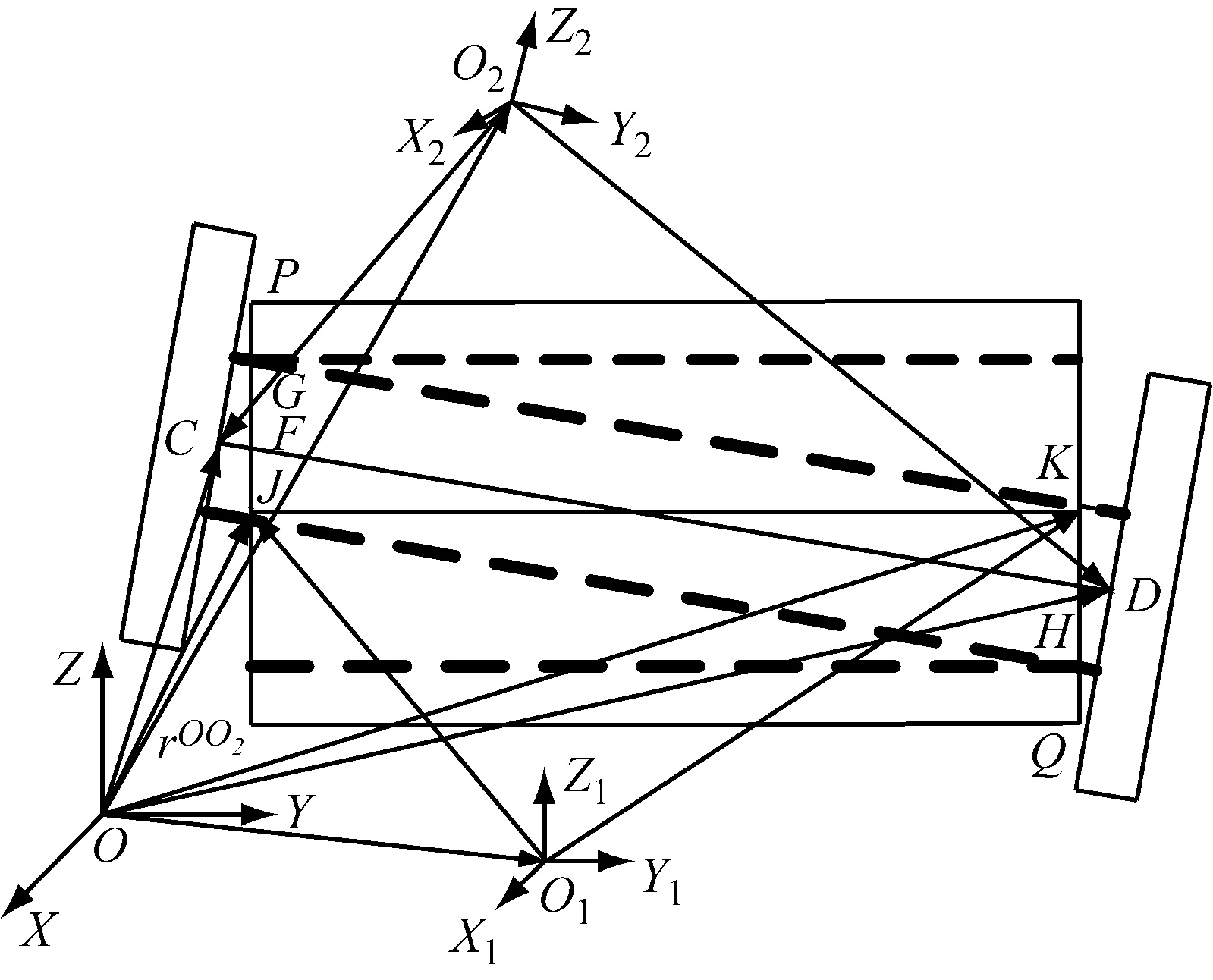
图4 潜在接触点前视图Fig.4 Front view of potential contact point

(9)

如图1所示的两个体在相对运动过程中,四个潜在接触对都有可能发生,应分别对其进行分析,如下:
①当体2销轴与体1轴套端面内圆左端接触时,潜在接触点为G,其左视图如图5所示。销轴被轴套端面所截为一椭圆面,GF为椭圆的半长轴,由于直线GF与直线JK垂直,因此GF与CD之间的夹角为90°+θ,设点G所在的销轴截面圆的圆心为OG,则OGG与CD垂直,所以OGG与GF之间的夹角为θ,可得
(10)
(11)
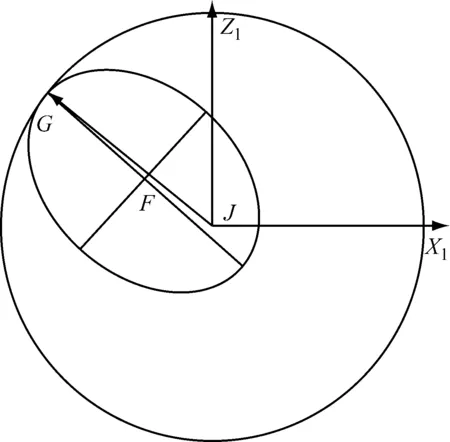
图5 潜在接触点左视图Fig.5 Left view of potential contact point
(12)
(13)
(14)
由式(10)~式(12)可得点G在局部坐标系2中的局部坐标,从而得到点G在局部坐标系1中的坐标。
(15)

(16)
同理,可求得体2和体1右侧接触时的潜在接触点H和Q,从而求得潜在接触点H和Q处的穿透量δH和δQ。
确定接触点的穿透量之后,接触点的速度也就可以确定。对式(15)和式(16)求导,可得接触点处的相对碰撞速度为
(17)
(18)
2 接触碰撞力模型
2.1法向接触碰撞力模型的确定
当两个物体发生接触时,可能会产生碰撞,碰撞过程会伴随着能量损失,Herts接触模型是常用的经典接触模型,但该模型将两个碰撞的物体假设为完全弹性碰撞,未考虑碰撞过程的能量损失,实际碰撞过程中,应该考虑相对碰撞速度、物体的几何参数、物体的材料属性等因素。因此,本文采用Lankarani-Nikravesh接触力模型[21-22],其公式为
(19)

刚度系数K可以表示为
(20)
阻尼系数C表示为
(21)

2.2铰间摩擦力模型的确定
由于空间圆柱铰间间隙的存在,使得铰连接的两个物体发生轴向的移动和绕轴的转动,在运动过程中两个相互接触的物体表面是粗糙的,因此会发生相互摩擦,而且这种摩擦力是不可忽略的,对系统的性能也会产生影响。本文采用修正的Coulomb摩擦模型[23]来计算摩擦力,该模型能够较准确的计算两个物体在相对转动和移动过程中的摩擦现象。切向摩擦力可以表示为

(22)
式中:cf为滑动摩擦因数;cd为动态修正系数;Fn为法向接触碰撞力;vt为相对切向速度。
其中,动态修正系数cd可以表示为
(23)
式中,v0和v1是为计算动态校正系数而指定的速度值。
3 动力学模型描述
空间圆柱间隙铰模型与空间圆柱理想铰模型的不同之处在于约束问题,将理想铰的运动学约束转化为力的约束。因此需要将接触力作为广义外力引入动力学模型进行求解。

系统所受理想约束记为
Φ(q,t)=0
(24)
采用Lagrange乘子法对系统进行动力学建模如下[24]
(25)
式中:M为系统的质量矩阵;Φq为系统约束方程的雅克比矩阵;γ为加速度方程的右端项;g为系统所受的外力列阵;Fc是接触力列阵,包含了接触碰撞力和摩擦力;Mc为Fc相对于刚体质心的力矩;α,β是违约修正系数。
4 仿真和实验分析
4.1铰间间隙的存在对系统性能的影响
本文采用常用的空间双摆模型来验证上述模型的有效性和正确性,如图6所示。双摆模型由三个体组成,体1为基准座,与大地相对固定不动,体1上存在轴孔,体2为摆臂,与通过体1轴孔的销轴和销轴两端的端盖固定在一起,体3为摆臂,其中,体2与体1之间存在轴向和径向的间隙,初始参数为体1轴半径R3=50 mm,端盖半径R4=100 mm,体2孔内径R1=50.1 mm,外径R2=100 mm,轴长度L1=200.5 mm,孔长度L2=200 mm,径向间隙为cx=cz=0.1 mm,轴向间隙两端分别为cy=0.25 mm,轴向间隙和径向间隙分别单独考虑,当只考虑径向间隙时,L1=200 mm,其余参数不变,当只考虑轴向参数时,R1=50 mm,其余参数不变。体3和体2之间假设为理想铰,不存在间隙,违约修正系数α=1 000,β=1 414。
图6 带有圆柱铰间隙的空间双摆模型Fig.6 Spatial double pendulum with cylindrical clearance joint
初始时刻,双摆放置在XZ平面,然后从该位置系统被释放,仅在重力的作用下系统发生运动,双摆的特征参数如表1所示。
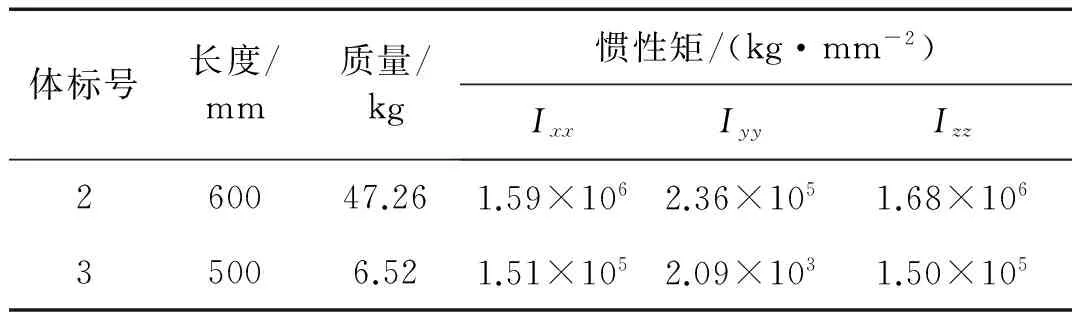
表1 双摆的特征参数Tab.1 Characteristic parameters of double pendulum
间隙的存在会对系统的运动学精度产生影响,由于L-N接触力模型只能计算两个接触体之间的法向接触力,且穿透量必须是沿接触体之间的法线方向,因此,对轴向间隙和径向间隙分别单独考虑,图7~图9所示为带有圆柱铰径向间隙的双摆模型和理想铰双摆模型中体3在全局坐标系3个方向上的运动位置的变化的对比,此时,L1=L2=200 mm,即轴向无间隙。从图中可以看出,当铰间存在径向间隙时,随着运动时间的推移,物体的运动轨迹与理想轨迹发生了偏离,产生了运动误差,但整体趋势一致。刚开始曲线基本重合,表明间隙对系统的影响不大,但随着时间的推移,间隙误差的影响变大。此结果与文献[16]的分析结果趋势一致,从而验证了本文方法的正确性。
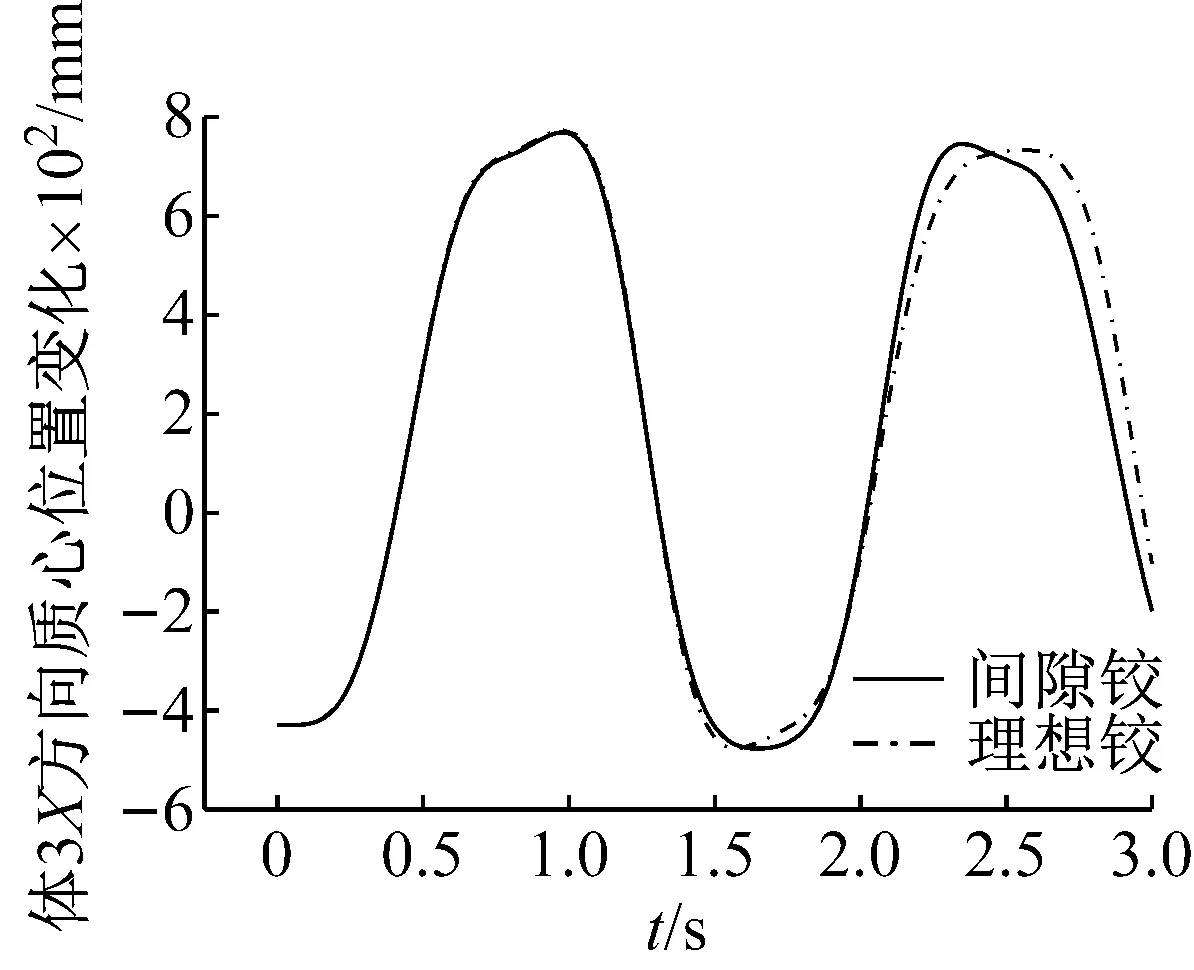
图7 体3质心X方向的位移Fig.7 Displacement of body 3’s center of mass in the X direction
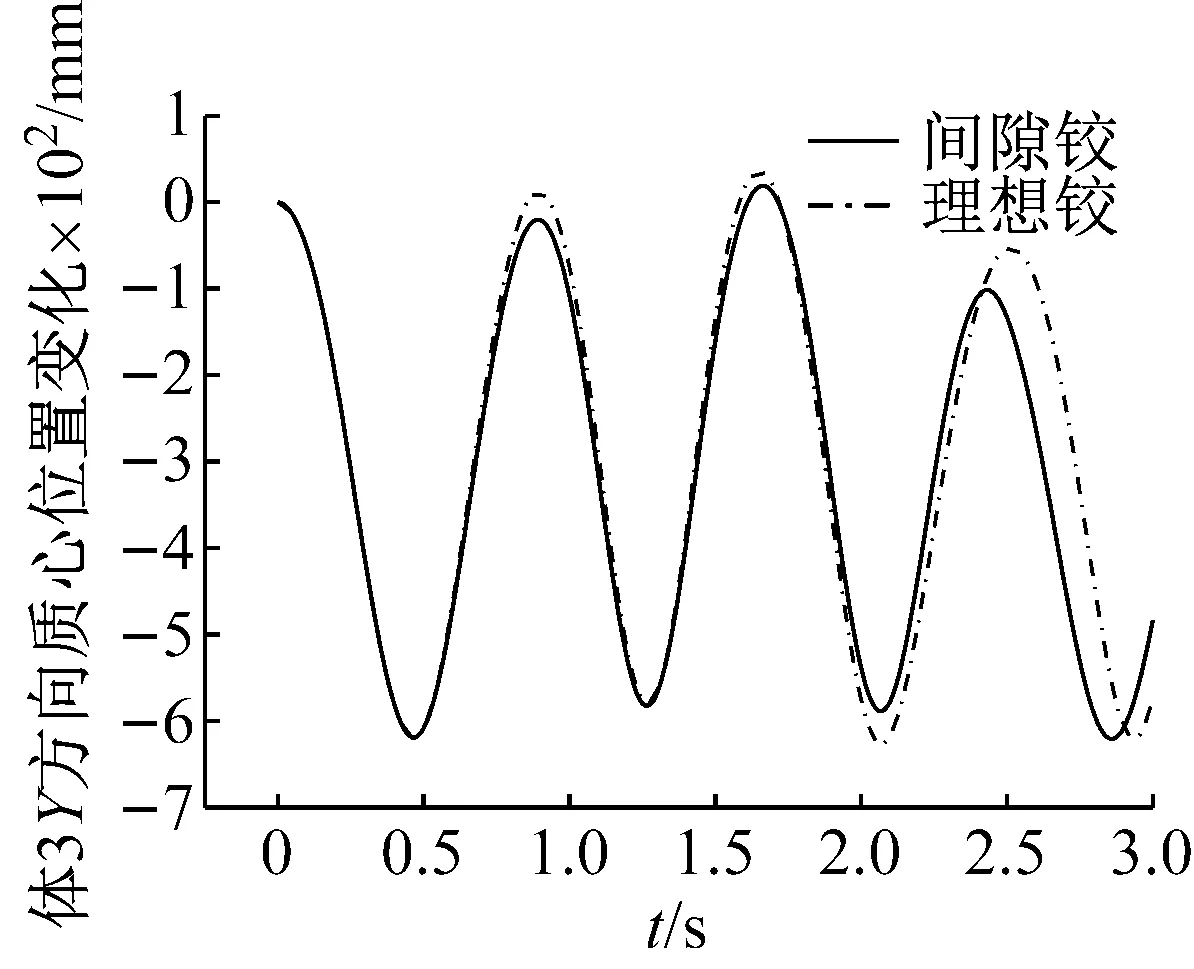
图8 体3质心Y方向的位移Fig.8 Displacement of body 3’s center of mass in the Y direction
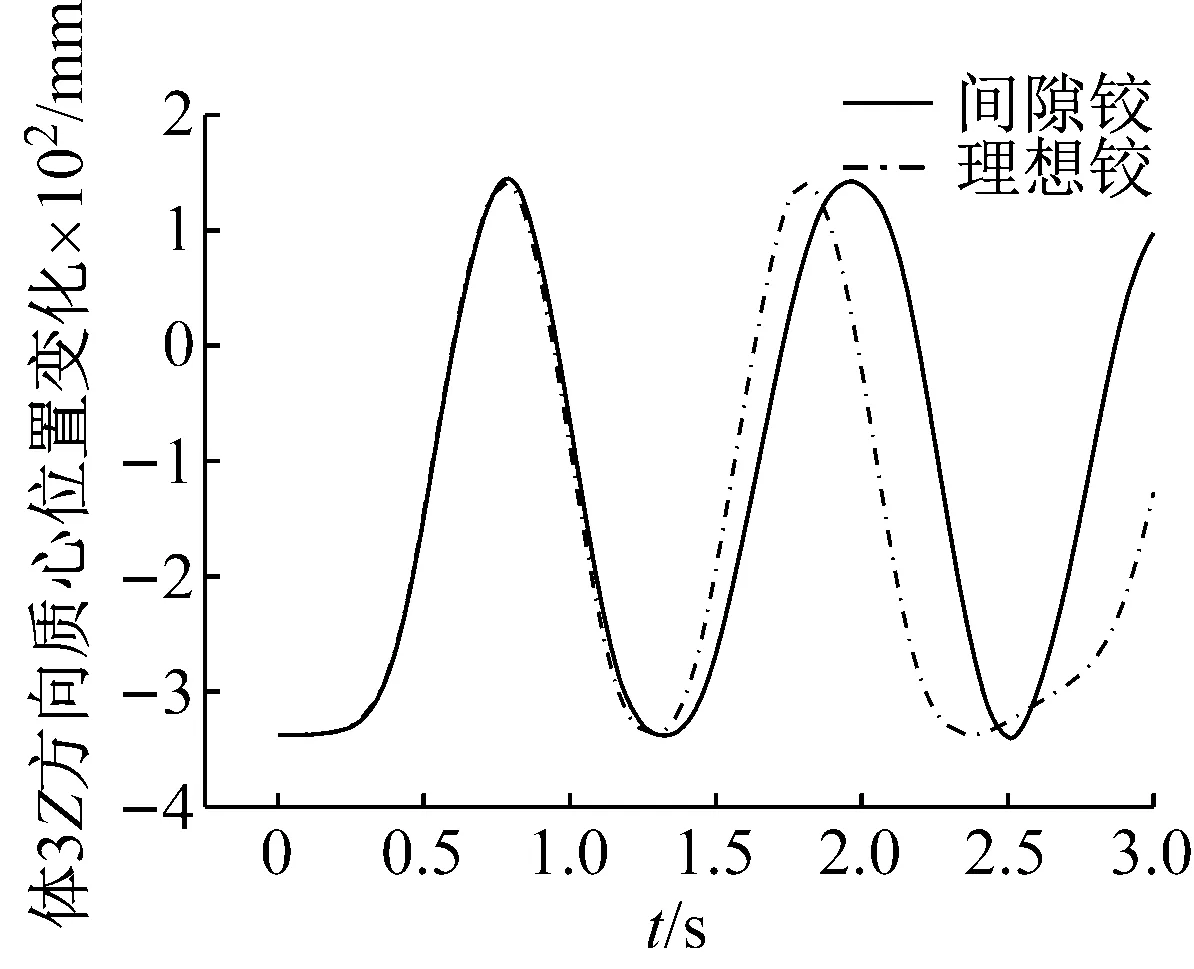
图9 体3质心Z方向的位移Fig.9 Displacement of body 3’s center of mass in the Z direction
图10为当存在径向间隙0.1 mm时,体3质心在全局坐标系Y方向的加速度随时间的变化情况,从图中可以看出,铰间径向间隙的存在会使得体3加速度发生剧烈的波动,说明径向间隙会使得物体运动发生振动,不再平稳。

图10 体3质心Y方向的加速度变化Fig.10 Acceleration change of body 3’s center of mass in the Y direction
由于体2相对体1不仅发生绕轴的转动,还会发生沿轴的移动,而体2端盖会与体1端面发生接触碰撞,限制了相对的轴向运动。当只存在轴向间隙cy=0.25 mm时,R1=50 mm,即径向无间隙,体2质心在轴向的运动如图11所示,从图中可以看出,在系统运动过程中,体2在轴向往复运动,在接触时刻发生波动。
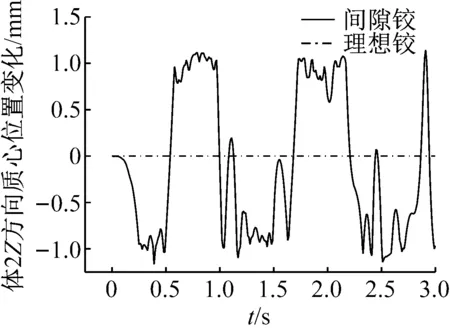
图11 体2质心Z方向的位移Fig.11 Displacement of body 2’s center of mass in the Z direction
图12~图14为带有空间圆柱间隙铰的双摆模型接触碰撞力在全局坐标系中的变化情况。图12和图13为只考虑径向间隙时的径向接触碰撞力,图14为只考虑轴向间隙时的轴向接触碰撞力。从图中可以看出,销轴径向与轴孔的接触碰撞力比较大,而轴向端盖与轴孔端面的接触碰撞力较小。由于间隙的存在,会产生轴向和径向的接触碰撞力,从而改变了系统的动力学性能,影响了系统的精度。
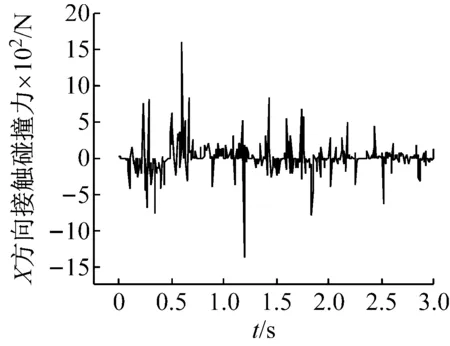
图12 圆柱间隙铰X方向接触碰撞力Fig.12 The contact impact force of the cylindrical clearance joint in the X direction
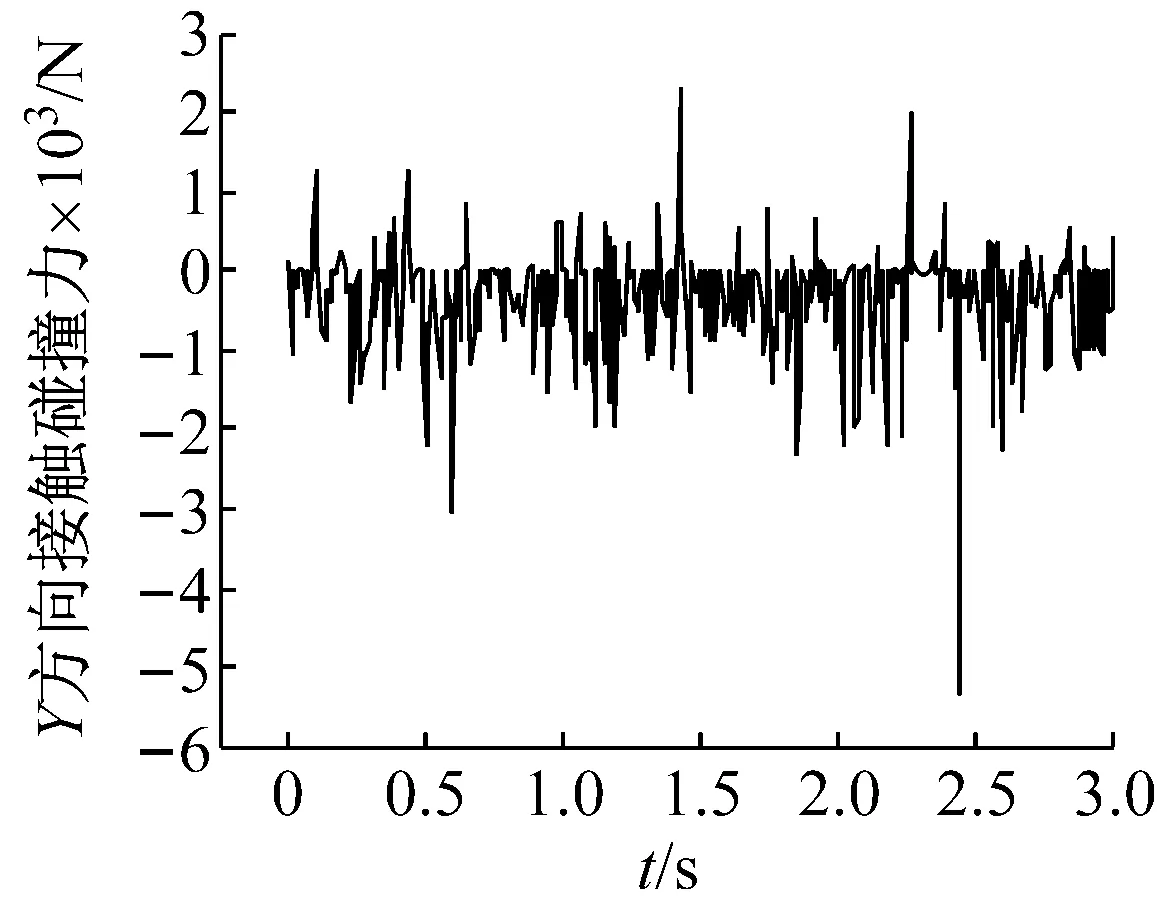
图13 圆柱间隙铰Y方向接触碰撞力Fig.13 The contact impact force of the cylindrical clearance joint in the Y direction
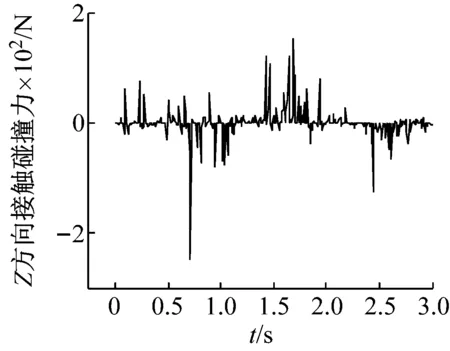
图14 圆柱间隙铰Z方向接触碰撞力Fig.14 The contact impact force of the cylindrical clearance joint in the Z direction
4.2间隙大小对系统性能的影响
间隙的存在会对系统运动学精度及动力学性能产生影响,间隙大小的不同对系统的影响程度也会不同。图15为当径向间隙发生变化,而轴向不考虑间隙时,体3质心Y方向的位置变化情况,从图中可以看出,间隙不同,末端体的运动轨迹变化很大,因此,需要合理控制铰间间隙。
5 结 论
空间圆柱铰间存在间隙会对系统运动学精度和动力学性能产生影响。本文针对工程实际中的空间圆柱铰存在轴向间隙和径向间隙的结构,首先对其接触模式进行描述,分析所有可能出现的接触模式,并运用矢量和空间几何对模型进行了分析,提出一种改进的获得潜在接触点的方法,并计算得到接触点处的穿透量。

图15 不同间隙对运动精度的影响Fig.15 The effect for kinematics accuracy with different clearance size
采用动力学方程,结合Lankarani-Nikravesh接触力模型和修正的Coulomb摩擦模型进行动力学建模,通过空间双摆模型对模型进行了验证,结果表明,与理想模型相比,间隙的存在会影响多体系统的位移,加速度等,轴向间隙的存在也会使得相对运动的物体发生往复碰撞而使得系统运动轨迹与理想情况发生偏离。由于间隙的原因,接触表面会发生碰撞,产生较大的接触碰撞力,也会对系统动力学性能产生影响。而且当间隙大小发生变化时,对系统的运动学精度和动力学性能的影响程度也不同。因此,需要合理控制铰间间隙的大小,以提高系统的到位精度。
[1] DUBOWSKY S, FREUDENSTEIN F. Dynamic analysis of mechanical systems with clearances Part 1: formation of dynamic model[J]. Journal of Engineering for Industry,1971, 93(1): 305-309.
[2] RAVN P. A continuous analysis method for planar multibody systems with joint clearance[J]. Multibody System Dynamics,1998, 2(1): 1-24.
[3] FLORES P, AMBRSIO J, CLARO J C P, et al. Kinematics and dynamics of multibody systems with imperfect joints: models and case studies[J]. Lecture Notes in Applied and Computational Mechanics, 2008,34:169.
[4] MUVENGEI O, KIHIU J, IKUA B. Dynamic analysis of multi-body mechanical systems with imperfect kinematic joints: a literature survey and review[J]. Sustainable Research and Innovation Proceedings, 2011, 3:1-16.
[5] FLORES P, AMBROSIO J. Revolute joints with clearance in multibody systems[J] . Computers & Structures, 2004, 82(17/18/19): 1359-1369.
[6] FLORES P, AMBROSIO J, CLARO J C P, et al. Translational joints with clearance in rigid multibody systems[J] . Journal of Computational and Nonlinear Dynamics, 2008, 3(1):112-113.
[7] TIAN Q, ZHANG Y, CHEN L, et al. Simulation of planar flexible multibody systems with clearance and lubricated revolute joints[J]. Nonlinear Dynamics, 2010, 60(4): 489-511.
[8] LI J L, YAN S Z, GUO F, et al. Effects of damping, friction, gravity, and flexibility on the dynamic performance of a deployable mechanism with clearance[J]. Proceedings of Institution of Mechanical Engineers, 2013, 227(8): 1791-1803.
[9] ERKAYA S, UZMAY I. Modeling and simulation of joint clearance effects on mechanisms having rigid and flexible links[J]. Journal of Mechanical Science and Technology,2014, 28(8): 2979-2986.
[10] FLORES P, LANKARANI H M. Spatial rigid multi-body systems with lubricated spherical clearance joints: modeling and simulation[J]. Nonlinear Dynamics, 2010, 60(1/2): 99-114.
[11] MACHADO M, COSTA J, SEABRA E, et al. The effect of the lubricated revolute joint parameters and hydrodynamic force models on the dynamic response of planar multi-body systems[J]. Nonlinear Dynamics, 2012, 69(1/2): 635-654.
[12] FLORES P, AMBRSIO J, CLARO J C P, et al. Dynamic behaviour of planar rigid multi-body systems including revolute joints with clearance[J]. Proceedings of the Institution of Mechanical Engineers, 2007, 221(2): 161-174.
[13] FLORES P, LANKARANI H M. Dynamic response of multibody systems with multiple clearance joints[J]. Journal Computational and Nonlinear Dynamics, 2012, 7(3): 031003-031013.
[14] FLORES P. A parametric study on the dynamic response of planar multi-body systems with multiple clearance joints[J]. Nonlinear Dynamics, 2010, 61(4): 633-653.
[15] FLORES P, AMBROSIO J, CLARO J C P, et al. Dynamics of multibody systems with spherical clearance joints[J]. Journal of Computational and Nonlinear Dynamics, 2006, 1(3): 240-247.
[16] FLORES P, AMBROSIO J, CLARO J C P, et al. Spatial revolute joints with clearances for dynamic analysis of multi-body systems[J]. Proceedings of the Institution of Mechanical Engineers, 2006, 220(4): 257-271.
[17] 尉立肖,刘才山. 圆柱铰间隙运动学分析及动力学仿真 [J]. 北京大学学报(自然科学版), 2005, 41(5): 679-687.
YU Lixiao, LIU Caishan. Dynamic simulation and kinetic description of revolute joint with spatial clearance [J]. Acta Scientiarum Naturalium Universitatis Pekinensis, 2005, 41(5): 679-687.
[18] BAUCHAU O A, RODRIGUEZ J. Modeling of joints with clearance in flexible multi-body systems[J]. International Journal of Solids & Structures,2002, 39(1): 41-63.
[19] BAUCHAU O A, JU C. Modeling friction phenomena in flexible multi-body dynamics[J]. Computer Methods in Applied Mechanics & Engineering, 2006,195(50/51):6909-6924.
[20] LIU C, TIAN Q, HU H. Dynamics and control of a spatial rigid-flexible multibody system with multiple cylindrical clearance joints [J]. Mechanism and Machine Theory, 2012, 52:106-129.
[21] LANKARANI H M, NIKRAVESH P E. A contact force model with hysteresis damping for impact analysis of multibody systems[J]. Journal of Mechanical Design, 1990, 112(3): 369-376.
[22] LANKARANI H M, NIKRAVESH P E. Continuous contact force models for impact analysis in multibody systems[J]. Nonlinear Dynamics, 1994, 5(2): 193-207.
[23] AMBROSIO J A C, SCHIEHLEN W, VALSEK M. Impact of rigid and flexible multibody systems: deformation description and contact models, in virtual nonlinear multibody systems[M].Berlin: Springer Netherlands,2003: 57-81.
[24] 赵刚练,姜毅,郝继光,等. 考虑圆柱铰链间隙的多刚体系统动力学计算方法[J]. 振动与冲击学报,2013,32(17):171-176.
ZHAO Ganglian,JIANG Yi,HAO Jiguang,et al.Computational method of rigid multibody system dynamics considering cylindrical joint clearance [J]. Journal of Vibration and Shock,2013,32(17): 171-176.
Kinematicsaccuracyanddynamicanalysisofmulti-bodysystemswithspatialcylindricalclearancejoints
LIU Taisu, QIAN Linfang, YIN Qiang
(School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
In order to investigate the influence of spatial cylindrical joints with clearances on system performances, all possible contact modes of a typical spatial cylindrical clearance joint were analyzed. Aiming at the spatial cylindrical joints with clearances in the axial and radial directions, the geometry and kinematics of complicated contact modes were analyzed. An improved method for computing potential contact points was proposed. The normal contact impact force model and the tangential friction force model were set up. Then, the multi-body dynamic equation was given with consideration of the normal contact impact force and the tangential friction force. Finally, a spatial double pendulum with joint clearance was taken as an example and the results were compared with those by using the ideal model. The results show that the kinematic accuracy and dynamic performance of the system were affected greatly, because of the existing clearances in the axial and radial directions, and different clearance sizes can change the kinematic accuracy of the system. The method and the results provide a theoretical basis for the design and improvement of the mechanical structures.
spatial cylindrical joint; contact mode; joint clearance; potential contact point; multi-body system
TH112
A
10.13465/j.cnki.jvs.2017.19.023
江苏省自然科学基金(BK20140773)
2016-03-08 修改稿收到日期:2016-08-03
刘太素 男,博士生,1990年4月生
钱林方 男,博士,教授,1961年12月生
