全电式水下阀门执行器设计及多电机同步控制策略研究*
2017-11-06王向宇刘培林王洪海
王向宇 刘培林 贾 鹏 张 磊 王洪海 王 素
(1.哈尔滨工程大学机电工程学院 黑龙江哈尔滨 150001; 2.海洋石油工程股份有限公司 天津 300451)
全电式水下阀门执行器设计及多电机同步控制策略研究*
王向宇1刘培林2贾 鹏1张 磊2王洪海1王 素1
(1.哈尔滨工程大学机电工程学院 黑龙江哈尔滨 150001; 2.海洋石油工程股份有限公司 天津 300451)
通过对全电式水下控制系统的研究,参考国外的相关产品,完成了全电式水下阀门执行器的结构设计,为了增加阀门执行器的可靠性,提出采用多电机冗余的方式驱动阀门。通过对多电机冗余驱动控制方法的研究,提出了一种基于遗传算法对时间误差积分进行优化的模糊PID控制方法,并引入了置信度对计算过程进行了优化,缩短了寻优的计算量,最终实现了多电机同步控制。利用Adams建立了阀门执行机构的动力学模型,使用Simulink对阀门不同的工作情况下的响应进行了联合仿真,结果表明本文设计的多电机冗余驱动的全电式水下阀门执行器可以实现对全电式水下阀门的冗余驱动,满足全电式水下阀门执行器的工作要求。
全电式水下阀门执行器;结构设计;多电机冗余驱动;遗传算法;时间误差积分;模糊PID控制方法;联合仿真
全电式水下生产系统被认为是现阶段深水油气田开发的最佳解决方案,全电式水下阀门执行器在全电式水下生产系统中扮演着关键的角色。与传统的液动水下阀门执行器相比,全电式水下阀门执行器驱动电机的寿命远低于液压缸,为了尽可能地提高驱动器的可靠性,全电式水下阀门执行器的各个组件都应当在冗余原则下进行设计,其中最关键的问题是多电机冗余驱动的设计,包括机械结构和多电机驱动器的控制策略设计。目前直流永磁电机以其优异的力矩性能已在全电式阀门驱动领域中被广泛使用,掌握全电式水下阀门核心技术的公司主要有Cameron、Aker、FMC等,他们所采用的全电式水下阀门执行器都采用永磁直流电机[1-2]。
目前有关冗余永磁直流电机设计的问题已经成为一个学术热点,涌现了众多的设计形式,有中间定子、内外双转子形式的[3];有将定子绕组设计成4个独立的三相绕组,共用同一个转子,从而构成4个子电机的形式[4];还有最常见的在定子槽中嵌放2套三相集中绕组,星形接法,2套绕组互差30°电角度的形式[5]。但是上述设计形式只考虑电机本身的冗余性,却没有考虑系统的冗余性。
目前已存在的电气同步控制理论类型模式主要有:基于同一给定电压的并联或串联运行方法和基于补偿原理的控制方法[6]。通过比较发现,并联运行的多电机同步驱动系统加转速补偿的方式是较理想的同步控制方案[7],多电机的电子控制技术主要有并 行控制[8]、主从控制[9]、交叉耦合控制[10]、电子虚拟总轴控制[11]、电机偏差耦合控制[12]等。本文选择电机偏差耦合策略作为多电机同步控制方案。
基于以上分析,本文提出了一种n个永磁同步电机并联的多电机冗余方案,即在正常情况下n个电机同时工作输出功率,在m个电机损坏的情况下余下的n-m个电机同步工作,以达到尽可能延长执行器寿命的目的。
1 全电式水下阀门执行器设计
1.1 执行器的结构设计
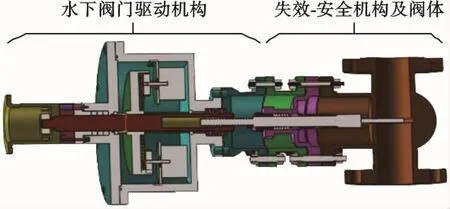
图1 全电式水下阀门执行器的机械结构总体方案Fig.1 Overall scheme of all-electric subsea valve actuator mechanical structure
全电式水下阀门执行器的机械结构总体方案如图1所示,主要由水下阀门驱动机构和失效-安全机构及阀体组成。水下阀门驱动机构负责为阀门的开闭提供动力,其结构包括多个驱动电机、ROV应急接口以及滚珠丝杠传动装置等。为了避免油气事故的发生,全电式水下阀门执行器需要具备失效-安全功能,水下阀门驱动机构通过滚珠丝杠向失效-安全装置输出动力,通过结构简单且可靠性高的并联弹簧机构实现失效-安全功能。
1.2 电机的冗余布置方式
电机的冗余布置方式主要有串联和并联2种,其中串联方式的多个电机共享同一组定子,所以并不是真正意义上的冗余,可靠性不高。本文设计的全电式水下阀门执行器驱动部分采用并联的布置方式,如图2所示。2个驱动电机通过固定在螺母丝杠一端的1个内齿轮并联在阀门执行器的传动轴上,通过滚珠丝杠将动力传递至阀门以实现阀门的开闭。每个电机的输出功率都可以满足阀门开/关的最大负载,在正常工作的情况下所有电机可以共同输出扭矩,所以当某个电机出现故障失效时,其余电机仍可以独自工作。该方案通过齿轮传动,每个电机都有独立的定子、转子、编码器以及驱动器,所以任意一组电机都可以独立完成阀门的操作,适合能够输出较大扭矩的永磁同步电机。

图2 并联的电机冗余布置方式Fig.2 Parallel redundancy layout scheme of motor
2 多电机同步控制策略研究
2.1 多电机同步控制策略
常用的差速负反馈控制方法能够满足2台电机的同步控制,但是对多台电机并联同步控制效果不理想,故选择多电机偏差耦合的控制方式。多电机偏差耦合的控制方式是通过消除电机间的转速差误差来实现多电机的同步控制,精度较高,且不存在虚拟总轴等同步方式中难以消除的恒定偏差,满足水下阀门执行机构电机冗余驱动同步性的要求,其控制框图如图3所示。

图3 多永磁同步电机偏差耦合控制框图Fig.3 Block diagram of multi-permanent magnet synchronous motor deviation coupling control
2.2 经遗传算法整定的模糊PID控制器
为了更有效地消除电机之间的速度差,使用模糊PID控制器对速度补偿器的输出参数进行订正。因复杂环境下经常受到未知干扰系统的模糊控制效果往往不够理想,故采用遗传算法对PID参数进行优化整定[13],主要分为以下几步:
1)遗传算法编码方式的选择。遗传算法的核心操作是通过染色体(即0和1)的突变和交叉来生成新的染色体,进而对染色体进行排序,以筛选出性能最佳的染色体,即最优解。本文选择直观、简单的二进制方式进行染色体编码。
2)适合度函数的确定。为了得到较好的动态性能,在误差绝对值时间积分性能指标(ITAE指标)的基础之上构建适合度函数。为了得到较小的累计误差,在时间上对误差量进行积分;为了尽可能地缩短上升时间,增加上升时间参数并给予其一定的权重。最终得到离散化的动态性能评价函数为

式(1)中:w1、w2分别为误差积分和上升时间的权重;e(k)为系统误差;δtu为上升时间。
为了防止动态性能指标在评价函数中占比太大,导致控制器失控,增加控制器输入量平方的权重,即

式(2)中:u(k)为控制器输入;w3为控制器输入量平方值的权重。
因为绝对值的积分无法评估系统中的超调量,而过大的超调量又是比较危险的,在水下阀门需要快速动作时甚至有可能损坏电机,所以在发生超调时加入了对超调量的惩罚项,其中通过对超调时产生的误差进行积分来评估超调量,即

式(3)中:ey(k)=y(k)-y(k-1),y(k)为被优化控制器的输出;w4为超调量积分项的权重。
最后,得到最优化控制器的评价函数为

因为遗传算法的功能是通过迭代进化逼近函数的最大值,因此取适合度函数为代价函数的倒数。考虑到超调量的惩罚,为了避免计算中出现零为分母,增加一个适当的常数来对代价函数做调节,设置适合度函数为

3)通过置信判据优化收敛速度。ITAE是一种很理想的PID控制满意度评价指标,但基于ITAE的适合度函数求解过程中要进行大量的积分运算,在实际的生产操作中也需要考虑适合度函数的计算时间,因此本文引入了一种基于置信度判据的方法优化适合度函数的采样周期。通过观察可以发现,当系统的输出进入稳态之后,J2、J3的值都为0,所以假设驱动电机的转速输入量为ω,采样区间为t,遍历基于最优解PID参数的求解过程中的输出量为ωout,则认为ωout-ω的符号发生2次变化或值为0持续一定数目个采样周期时,基于该采样区间得出的适合度函数值是可信的,此时置信判据z=1,否则z=0。
4)对遗传操作的优化。在整定PID参数时,为了更快地得到最优解,可以输入PID参数作为参考解,在参考解的基础上进行变异,产生第1个种群的世代。为了得到多样化的遗传信息,第1次变异的几率设置较大,本文中定为0.4。
参考M.Srinivas提出的交叉及变异的自适应遗传操作方法[14],使用一种取种群适合度平均数做比较的方法对交叉和变异概率进行改进,其公式为
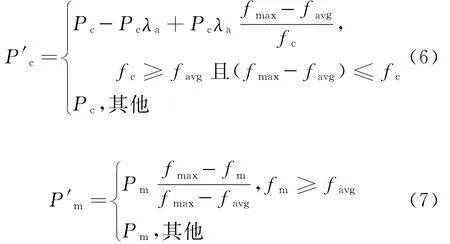
式(6)、(7)中:P′c为经调整后的交叉概率;P′m为经调整后的变异概率;Pc为设定的交叉概率,取0.4;Pm为设定的变异概率,取0.05;fmax为当前世代种群中的最大适合度;favg为当前世代种群中50个个体的平均适合度;fc为当前操作个体的适合度;fm为经调整后操作个体的适合度。
由式(6)、(7)可以看出,将个体的适合度看作交叉和变异概率划分的首要条件,当前操作个体的适合度较大时,将交叉概率和变异概率的值设定较小,保护优秀个体;反之,将交叉概率和变异概率调小。同时,对于优秀个体还需要考虑种群适合度的集中程度的影响,当fmax-favg较大时,可以认为种群比较分散,交叉概率较大,变异概率较小,加速进化速度;反之,当fmax-favg较小时,种群的个体之间比较相似,可以减小交叉概率,增大变异概率,防止种群进入局部最优。
3 仿真及结果分析
3.1 联合仿真模型搭建
为了得到符合实际工况的仿真结果以验证前文所提出的多电机控制策略,本文使用Adams建立阀门执行机构的动力学模型,并导入Simulink中对阀门的不同工作状态进行联合仿真。仿真模型假设条件如下:
1)由于执行器齿轮组质量较大,Adams中冲击接触力模型对总能量也有一定的消耗,而在电机电流环响应速度不变的情况下,速度环的变换较缓慢,位置误差较小,所以本文的虚拟样机仿真是在空载的情况下进行,以便能够更好地观察比较控制性能。
2)为了简化仿真模型,本文的全电式水下阀门驱动机构采用双电机冗余驱动,永磁同步电机模型选用MAXON Motor公司提供的EC-4pole系列永磁同步电机,其特征属性见表1。
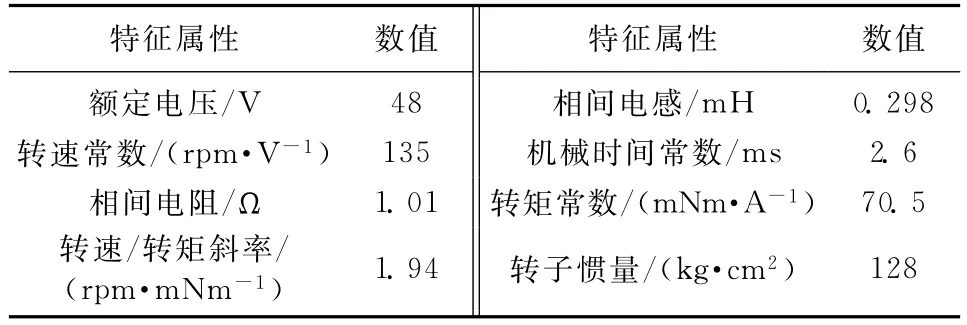
表1 仿真用永磁同步电机的特征属性Table 1 Simulation with the characteristic attribute of the permanent magnet synchronous motor
根据控制器设计搭建永磁同步电机的控制框图,其中永磁同步电机使用矢量控制的方式驱动,速度环的控制可以使用Simulink软件提供的fuzzy工具箱设置模糊PID控制器中参数的模糊推理以及解模糊化,利用搭建的遗传算法模块进行模糊PID的离线整定。模糊PID子系统如图4所示。
在完成模糊控制器的搭建并建立电机驱动模块之后,通过导入永磁同步电机模块,从而完成虚拟样机的搭建。利用带有Simulink接口的Adams模块,完成Simulink和Adams的联合仿真,其框图如图5所示。
该联合仿真带有位移环反馈,其中Adams输出的速度为rad/s,而PMSM模块的输入输出量均为°/s,所以为了方便起见,要对Adams的输入输出变量进行单位换算,换算函数值如表2所示。
3.2 不同情况下的输出结果分析
1)阶跃响应信号。给定幅值为180°的阶跃响应信号作为从动齿轮的目标位置,模拟从动齿轮在固定目标位置情况下的工作情况,结果如图6所示。
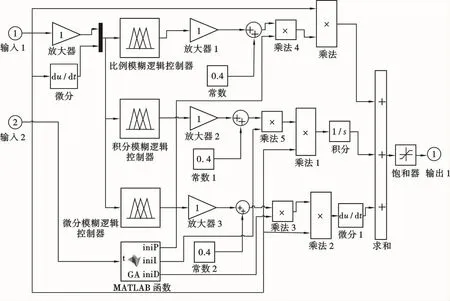
图4 模糊PID子系统框图Fig.4 Subsystem diagram of fuzzy PID
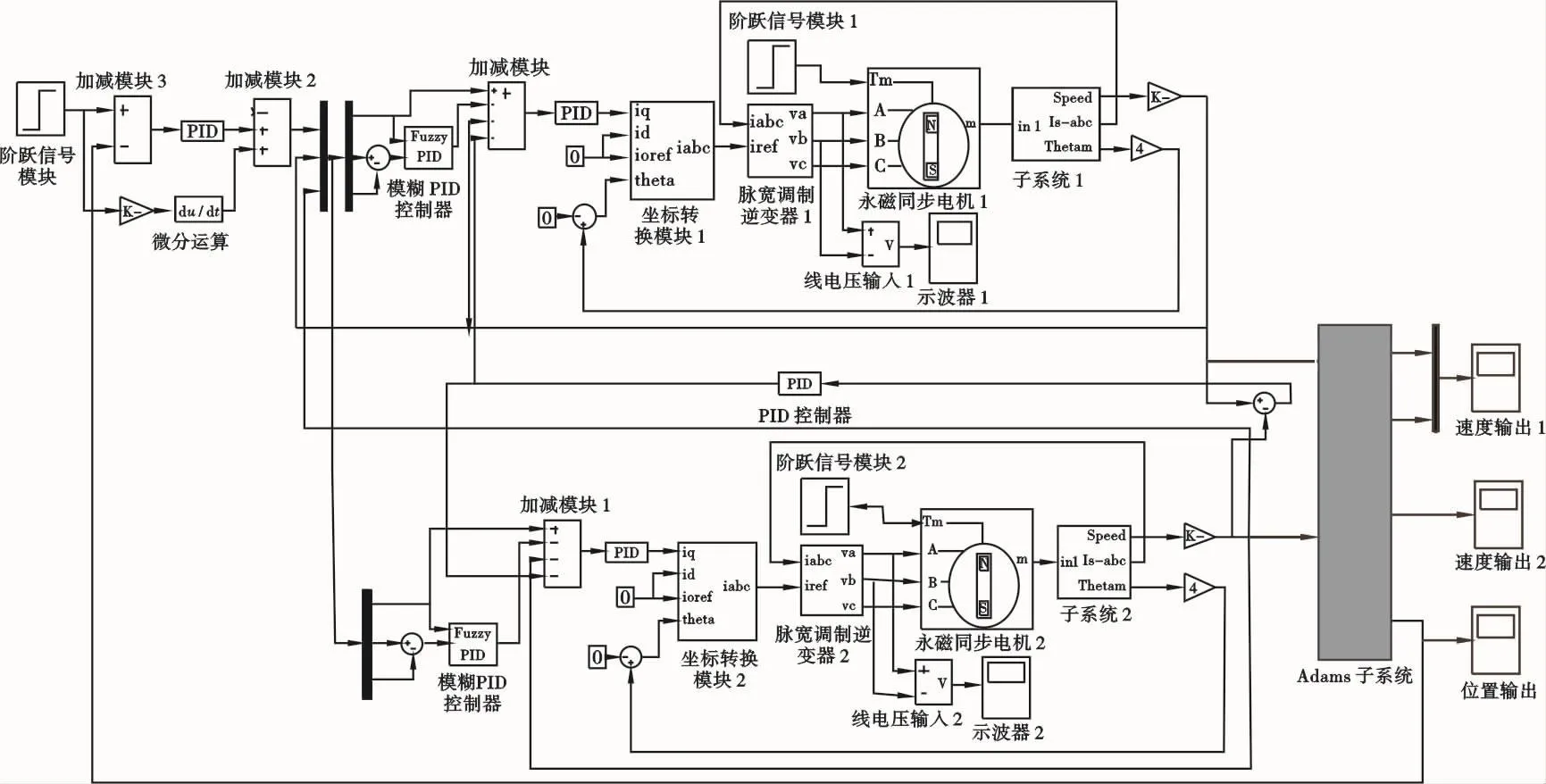
图5 Simulink和Adams联合仿真框图Fig.5 Joint simulation diagram of Simulink and Adams
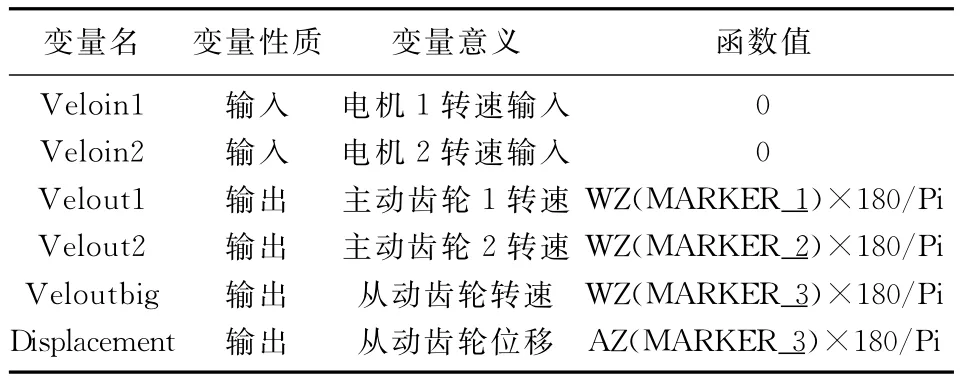
表2 Adams输入/输出变量表Table 2 Variable table of Adams input/output
从图6可以看出,驱动电机的转速在电流限幅的作用下以一个稳定的斜率在0.3 s之内迅速地达到7 800°/s;此后,由于转速环的限制,驱动电机的转速保持在7 800°/s左右,并持续减小位置误差;当从动齿轮的位置接近设定的目标位置时,电机转速逐渐降低,避免超调。由于主动齿轮由Simulink中永磁同步电机模块产生的转速变量直接驱动,所以2个主动齿轮的旋转和永磁同步电机的输出保持一致,而从动齿轮的转速和位置完全由Adams模块计算,故从动齿轮的输出在3°的范围内产生周期性的摆动。整个调节过程总的调节时间为1.43 s,最大稳态误差为0(精度0.1°/s),速度环的最大超调量为0.33%,位置环的最大超调量为0(精度0.1°)。
2)斜坡信号。给定一个斜率为12°/s的斜坡信号作为从动齿轮的目标速度,模拟从动齿轮在固定目标速度的情况下的工作情况,结果如图7所示。
从图7可以看出,与阶跃信号的情况类似,驱动电机在信号输入之后的0.2 s内快速达到了转速峰值,并在此后的0.3 s内降低至稳定状态;但不同之处在于驱动电机的转速是由速度环输出的反馈信号决定的,故转速不会直接达到驱动电机的最大峰值7 800°/s,其转速峰值由设定的从动齿轮的转速决定。
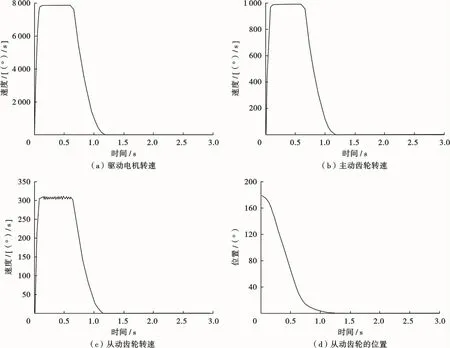
图6 阶跃信号输入下的输出情况Fig.6 Output under step signal input
3)电机失效情况。双电机冗余驱动设计的目的就是为了给系统在电机失效的情况下提供备用的驱动,让闸阀仍然可以正常开关,维持油气生产的正常进行。当电机失效时,在不考虑减速器反转产生的摩擦力的情况下,电机及与其配合的传动齿轮可以视作负载,会对阀门的开启或关闭产生一定的扰动,而该扰动反映在位置输出上又会被反馈给电机的位置环,情况较为复杂。为了研究电机失效的应急工作状态,搭建了虚拟样机对传动机构进行仿真,通过改变输入量来模拟齿轮失效的应急工作状态。
对图5中的Adams_sub模块进行修改,删除脉宽调制逆变器2的转速输出2,保留永磁同步电机1的转速输出。给定幅值为180°的阶跃响应信号作为从动齿轮的目标位置,模拟从动齿轮在固定目标位置及单电机失效情况下的工作情况,结果如图8所示。
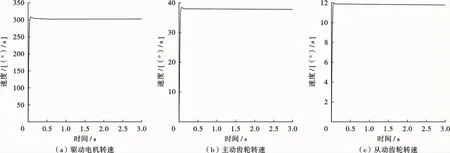
图7 斜坡信号输入下的输出情况Fig.7 Output under the ramp signal input
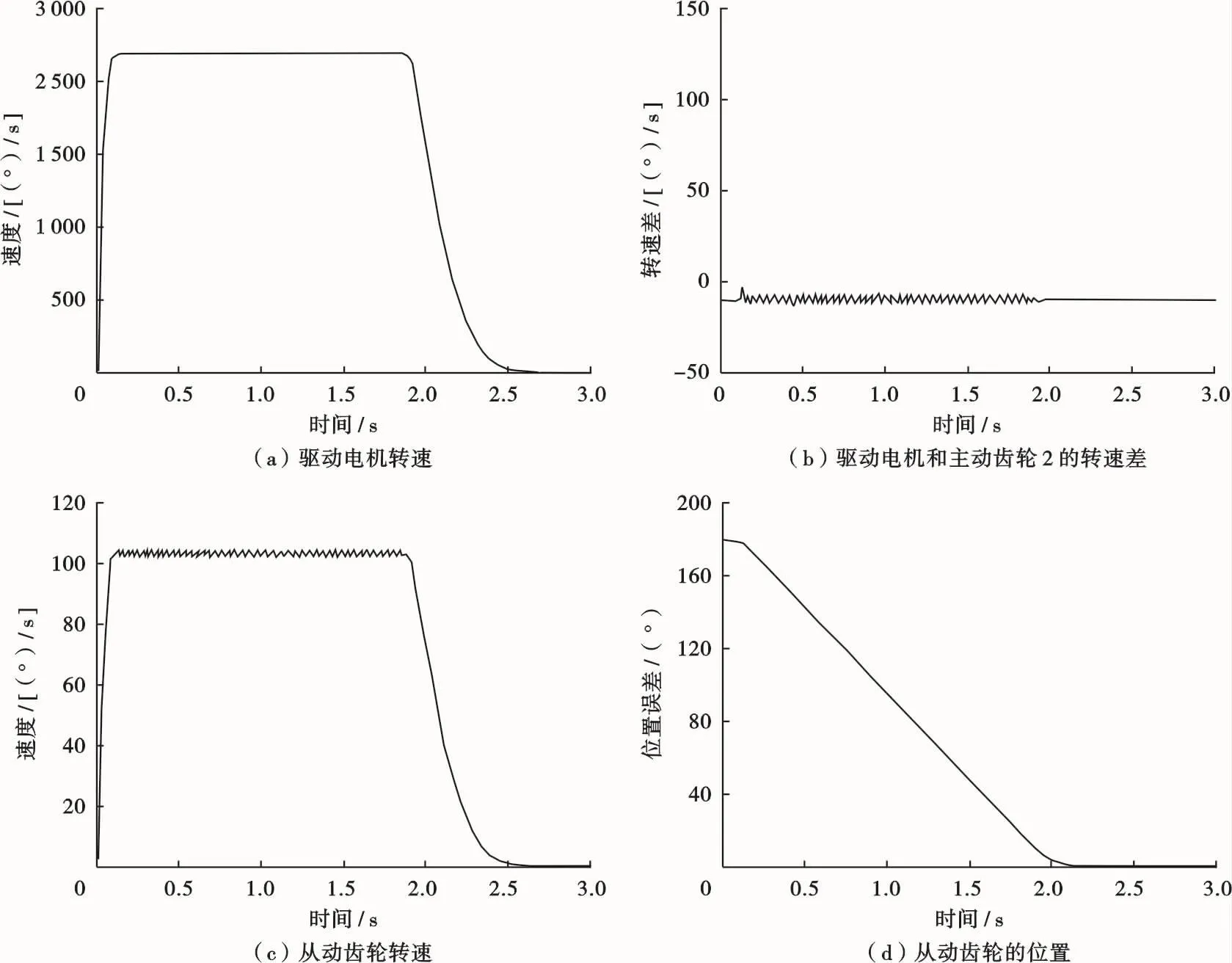
图8 电机失效情况下的输出情况Fig.8 Output in case of motor failure condition
从图8可以看出,驱动电机的转速和从动齿轮位置的调整过程是比较类似的;在电机失效的情况下,主动齿轮2在该系统中变为了负载,故系统负载变大,驱动电机在功率不变的情况下的转速峰值低于7 800°/s,且主动齿轮2的转速和驱动电机的输出转速之间的差值保持一个周期性的震荡;从动齿轮的转速输出依然存在和图6c中类似的震荡,不过因为主动齿轮2没有功率输入,相当于增大了负载的质量,所以该震荡的幅值在1.5°左右,小于图6c中的幅值,且达到设定从动齿轮位置的时间也较长。
通过以上仿真分析可知,本文提出的驱动控制策略对于速度环反应较迅速,对于位置环无超调,符合全电式水下阀门执行器多电机同步控制要求。
4 结论
1)通过对全电式水下控制系统的研究,参考国外的相关产品,结合全电式水下控制系统的特殊性能要求,完成了全电式水下阀门执行器的结构设计,提出采用多电机的冗余布置方式以增加阀门执行器的可靠性。
2)提出了基于多电机偏差耦合结构的模糊PID多电机同步控制方法,采用时间误差绝对积分指标对模糊PID控制器的参数进行了评估,采用遗传算法对参数进行了优化,引入置信度对计算过程进行了优化,缩短了寻优计算量,最终实现了多电机同步控制。
3)对阀门不同工作情况下的响应进行了仿真,结果表明本文提出的多电机同步控制方法可以满足全电式水下阀门执行器的工作要求。
[1] DANIEL A,JANVADEN A.The 2ndgeneration DC all-electric subsea production control system[R].OTC20300,2011.
[2] BERVEN J.Subsea production control systems for all-electric Xmas trees[D].Norway:Stavanger University,2013.
[3] 张林森,徐海珠,王松林,等.一种新型水下推进用双转子永磁电机及其研究现状[J].鱼雷技术,2013,21(6):445-449.ZHANG Linsen,XU Haizhu,WANG Songlin,et al.The new type of dual-rotor permanent magnet motor for underwater propulsion:a review[J].Torpedo Technology,2013,21(6):445-449.
[4] 毛由正.多冗余永磁无刷直流电机研究[D].杭州:浙江大学,2015.MAO Youzheng.Study on redundant brushless DC motor[D].Hangzhou:Zhejiang University,2015.
[5] 杨永亮.双余度无刷直流电机控制技术研究[D].西安:西北工业大学,2007.YANG Yongliang.Studies on control technology of dual redundancy brushless DC motor[D].Xi'an:Northwestern Polytechnical University,2007.
[6] SHI Hu,GONG Guofang,YANG Huayong,et al.Compliance of hydraulic system and its applications in thrust system design of shield tunneling machine[J].Science China Technological Sciences,2013,56(9):2124-2131.
[7] 刘福才,张学莲,刘立伟.多级电机传动系统同步控制理论与应用研究[J].控制工程,2002,9(4):87-90.LIU Fucai,ZHANG Xuelian,LIU Liwei.Synchronous control theory and practical study of multi-motor synchronous driving system[J].Control Engineering of China,2002,9(4):87-90.
[8] TOMIZUKA M,HU Jwuaheng,CHIU Tsuchih,et al.Synchronization of two motion control axes under adaptive feedforward control[J].Journal of Dynamic Systems,Measurement and Control,1992,114(2):196-203.
[9] KOREN Y.Cross-coupled biaxial computer control of manufacturing system[J].Journal of Dynamic Systems Measurement and Conlrol,1980,102(4):265-272.
[10] ANDERSON R G,MEYER A J,VALENZUELA M A,et al.Web machine coordinated motion control via electronic Line-Shafting[J].IEEE Transactions on Industry Applications,2001,37(1):247-254.
[11] VALENZUELA M A,LORENZ R D.Electronic Line-Shafting control for paper machine drives[J].IEEE Transaction on Industry Applications,2001,37(1):158-164.
[12] 李平.基于模糊PID的多电机同步控制[D].沈阳:东北大学,2010.LI Ping.Multi-motor synchronous control based on fuzzy PID[D].Shenyang:Northeastern University,2010.
[13] SRINIVAS M,PATNAIK L M.Adaptive probabilities of crossover and mutation in genetic algorithm[J].IEEE Transactions on Systems Man & Cybernetics,2002,24(4):656-667.
[14] 龙凯,程颖.齿轮啮合力仿真计算的参数选取研究[J].计算机仿真,2002,19(6):87-88,91.LONG Kai,CHENG Ying.The research of parameters by the simulation of exciting force in gears[J].Computer Simulation,2002,19(6):87-88,91.
Design of an all-electric subsea valve actuator and the strategy for multi-motor synchronous control
WANG Xiangyu1LIU Peilin2JIA Peng1ZHANG Lei2WANG Honghai1WANG Su1
(1.College of Mechanical and Electrical Engineering,Harbin Engineering University,Harbin,Heilongjiang150001,China;2.Offshore Oil Engineering Co.Ltd.,Tianjin 300451,China)
Based on the study on the all-electric subsea control system,the structure design of an all-electric subsea valve actuator is completed with reference to the related products abroad.In order to enhance the reliability of the valve actuator,it is proposed that the multi-motor redundant way be used to drive the valve.On the basis of the research on redundant drive control method,a fuzzy PID control approach based on genetic algorithm to optimize the time error integral is proposed;and the confidence degree is introduced to optimize the calculation process which shortens the optimization calculation and realizes the multi-motor synchronous control.The dynamic model of the valve actuator is established by using Adams,and Simulink was used to jointly simulate the response of the valve under different working conditions.The results show that the all-electric subsea valve actuator can be driven by the multi-motor redundant way and meet the subsea control requirements.
all-electric subsea valve actuator;structure design;multi-motor redundant drive;genetic algorithm;time error integral;fuzzy PID control method;joint simulation
TE953
A
王向宇,刘培林,贾鹏,等.全电式水下阀门执行器设计及多电机同步控制策略研究[J].中国海上油气,2017,29(5):149-156.
WANG Xiangyu,LIU Peilin,JIA Peng,et al.Design of an all-electric subsea valve actuator and the strategy for multi-motor synchronous control[J].China Offshore Oil and Gas,2017,29(5):149-156.
1673-1506(2017)05-0149-08
10.11935/j.issn.1673-1506.2017.05.021
*工信部海洋工程装备科研项目“水下控制系统与关键设备研发”、工信部海洋工程装备科研项目“水下控制系统对接盘、锁紧结构研制”,中央高校基金“新型复合式顶张式立管关键技术研究(编号:HEUCFP201727)”、中央高校基金“深水作业系统快速换接装置及其智能力/位混合控制研究(编号:HEUCF170703)”部分研究成果。
王向宇,男,在读博士研究生,主要从事水下智能机械和机器人控制技术的研究。地址:哈尔滨市南岗区南通大街145号哈尔滨工程大学61号楼(邮编:150001)。E-mail:wangxiangyu325@126.com。
刘培林,男,教授级高级工程师,1988年毕业于石油大学(华东),现主要从事海洋石油研究设计工作。地址:天津市塘沽区丹江路1078号616信箱(邮编:300451)。E-mail:peilin@mail.cooec.com.cn。
2016-08-11 改回日期:2017-04-10
(编辑:吕欢欢)
