舰载雷达两轴转台稳定方程推导
2017-11-03冯瑗瑗
雷 杰,吴 彦,冯瑗瑗
(中国船舶重工集团公司第七二四研究所,江苏 南京 211153)
舰载雷达两轴转台稳定方程推导
雷 杰,吴 彦,冯瑗瑗
(中国船舶重工集团公司第七二四研究所,江苏 南京 211153)
舰载雷达两轴转台系统机械结构简单,可对雷达天线法线的姿态角进行控制以保证雷达波束指向,但在舰船发生摇摆时,雷达波束绕天线法线发生旋转。本文分析了大地直角坐标系和舰船直角坐标系的关系,在舰船直角坐标系中对舰载雷达两轴转台系统的姿态角进行定义,用空间解析几何法推导出已知舰船平台罗经信号、天线法线姿态角时两轴转台系统的稳定方程和波束旋转角方程,为舰载雷达两轴转台系统的伺服控制和波束相关补偿提供理论依据。
两轴转台系统;空间解析几何法;姿态角;稳定方程;旋转角方程
0 引 言
舰船在水面航行时船体会产生纵摇、横摇运动和航向的改变,这些会对舰载雷达的波束指向产生重大影响。舰载雷达两轴转台系统(见图1)机械结构简单,可对雷达天线法线的姿态角(方位角和俯仰角,相对大地)进行控制以保证雷达波束指向,但舰船发生摇摆时,雷达波束绕天线法线发生旋转,所以两轴转台系统通常适用于单束锥形波雷达。
1 坐标系及姿态角定义
平台罗经提供舰船在大地直角坐标系O-XYZ中的纵摇角、横摇角和航向角。原点O位于舰船甲板中心,X轴平行于水平面,正北为正;Y轴平行于水平面,正西为正;Z轴垂直于水平面XOY,铅垂向上为正(见图 2,图中 H=40°,P=–10°,R=–15°)。
舰船航向角、纵摇角和横摇角定义如下:
H为航向角,正北线OX顺时针到线OXc (舰首线OM在水平面投影线)的角度,水平面内测量。
P为纵摇角,舰首线OM与水平面的夹角,在过舰首线OM的铅垂面内测量,舰首线在水平面上方(舰首抬高)为正。
R为横摇角,甲板面(面MON)绕舰首线OM旋转的角度,即舰船左舷线ON和线OYc(过左舷线的舰船横剖面与水平面交线)的夹角;其测量平面(横摇面)垂直于甲板面且垂直于舰首线(即OM⊥横摇面NOYc),左舷线在水平面上方(左舷抬高)为正。
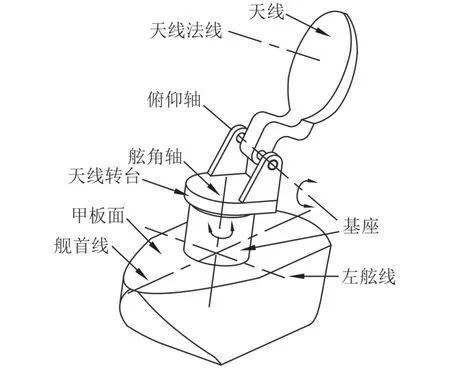
图1 舰载雷达两轴转台系统示意图Fig. 1 The sketch figure of the two-shaft-stabilized platform of the ship-borne radar
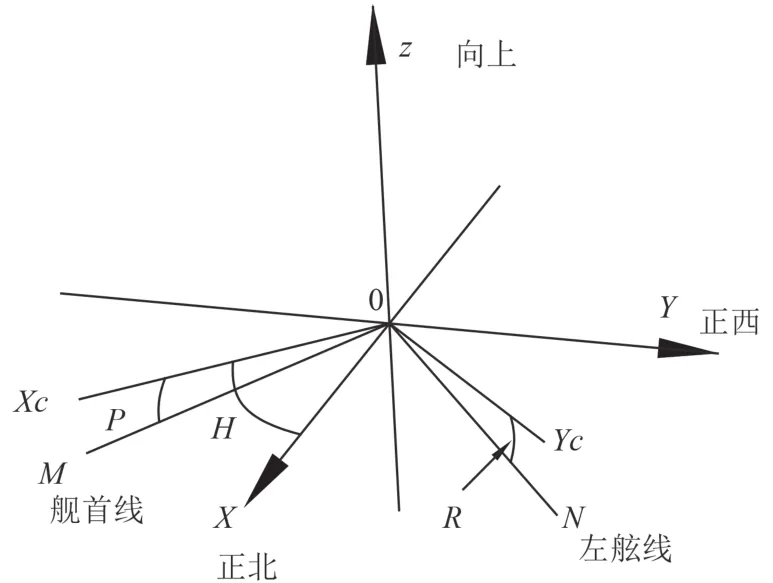
图2 大地直角坐标系舰船姿态角Fig. 2 The attitude angles of ship in the geodetic coordinate system
Z轴在过舰首线OM的铅垂面内,OM⊥OYc,OZ⊥OYc,可知OYc⊥铅垂面MOZ,OYc⊥OXc,OXcYcZ为直角坐标系,即舰船直角坐标系(见图3)。

图3 舰船直角坐标系雷达两轴转台系统姿态角Fig. 3 The attitude angles of the two-shaft-stabilized platform in ship coordinate system
大地直角坐标系绕Z轴顺时针旋转航向角H得舰船直角坐标系,本文公式在舰船直角坐标系(不考虑航向值)中推导。在不影响推导结果前提下,各姿态角的顶点设在O。
舰载雷达转台系统有2根轴:舷角轴和俯仰轴,舷角轴为天线转台(安装在基座上,基座与甲板面一体)中心轴,舷角轴垂直于甲板面;俯仰轴安装在天线转台上方,俯仰轴垂直于舷角轴。舰载雷达绕舷角轴和俯仰轴运动。
Ac 为天线甲板面舷角,天线转台绕舷角轴顺时针运动的角度,即舰首线OM顺时针到舷角线OJ(天线法线OG在甲板面MON内投影线)的角度,甲板面内测量。
Ec 为天线甲板面俯仰角,天线绕俯仰轴运动的角度,即天线法线OG与舷角线OJ的夹角,在平面GOJ(过天线法线且垂直于甲板面的平面)内测量,夹角在甲板面上方为正(因雷达机械结构限制,该角度一般不超过±30°)。
A 为天线方位角,线OXc顺时针到方位线OK(天线法线OG在水平面投影线)的角度,水平面内测量。
E 为天线俯仰角,天线法线OG与方位线OK的夹角,在平面GOK(过天线法线的铅垂面)内测量,夹角在水平面上方为正。
φ 为波束旋转角,平面GOK与平面GOJ的夹角(锐角)。沿天线法线方向看(点O到G),面GOK绕天线法线OG逆时针到面GOJ的角度φ为正,顺时针为负。
A 为波束旋转方位角,线OXc顺时针到旋转方位线OS(平面GOJ与水平面的交线,取该交线与天线法线OG夹角为锐角的部分)的角度,水平面内测量;At 为雷达目标真方位角,由大地直角坐标系和舰船直角坐标系的关系可知,雷达目标真方位值即为航向角H与天线方位角A值之和。
2 稳定方程推导
工程项目中,往往是已知舰船平台罗经信号(P,R)和天线姿态角(A,E),求解稳定方程(即执行环节角度(Ec,Ac))和波束旋转角φ。取线OM、线ON、线OG、线OJ、线OK、线OS等为单位长度(见图 3,图中 P=–10°,R=–15°,Ac=50°,Ec=+20°,A=41.55°,E=+23.82°,A=49.44°,φ=+18.94°)。
2.1 甲板面方程
由空间解析几何法,舰首线上M点(见图3)空间坐标为(cosP, 0, sinP),左舷线上N点(见图4)空间坐标为(–sinR sinP, cosR, sinR cosP),甲板面过O,M,N三点,得其方程为:
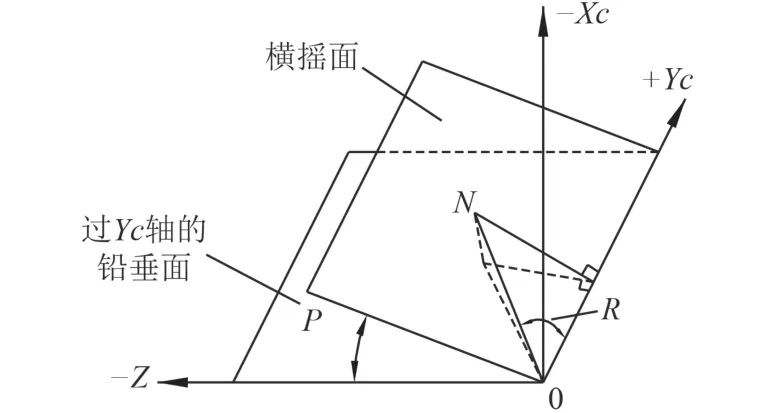
图4 N点空间坐标Fig. 4 The space coordinates of point N

2.2 过天线法线垂直于甲板面的平面方程
天线法线上G点(见图5)空间坐标为(cosAcosE,–sinAcosE, sinE),由方程(1)可知甲板面法线(设为OF)方向向量为(sinP, tanR, –cosP),过O,G,F三点的平面即为过天线法线垂直于甲板面的平面,得其方程为:

其中,
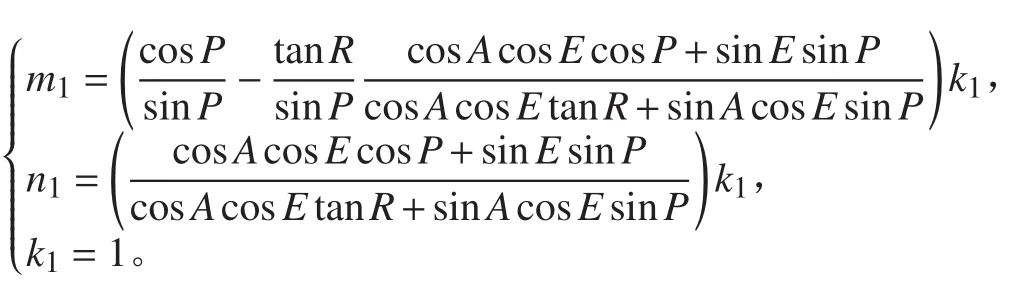

图5 G点空间坐标Fig. 5 The space coordinates of point G
2.3 舷角线向量
设甲板面MON与过天线法线垂直于甲板面的平面GOJ的交线(过原点O)方向向量为由方程(1)和方程(2)得该交线一般方程:
由上方程组得:

2.4 天线甲板面舷角Ac和俯仰角Ec

天线甲板面舷角Ac为:
当n40时,当n4>0 时,

雷达波束甲板面俯仰角Ec为:
当k4sinE时,,当k4>sinE时,
2.5 波束旋转方位角A′
由方程(2),水平面(方程为z=0)与过天线法线垂直于甲板面的平面GOJ的交线(过原点O)的一般方程为:
该交线点向式方程为:

波束旋转方位角A′为:

2.6 波束旋转角φ

由2.2节可知,过天线法线垂直于甲板面的平面方程为:

可得:

3 数据验证
验证推导公式,当P,R,E,A分别过奇点时,可用其近似值代替;如0用0.001代替,这样既可避免推导过程中出现无穷大值(公式分母为0),又不会影响验证结果。
设纵摇是幅值5°,周期5 s的正弦信号,横摇是幅值20°,周期8.5 s正弦信号,方位增量为60°/s,俯仰值E=+10°,雷达转台系统数据见图6,数据与工程实践相符。
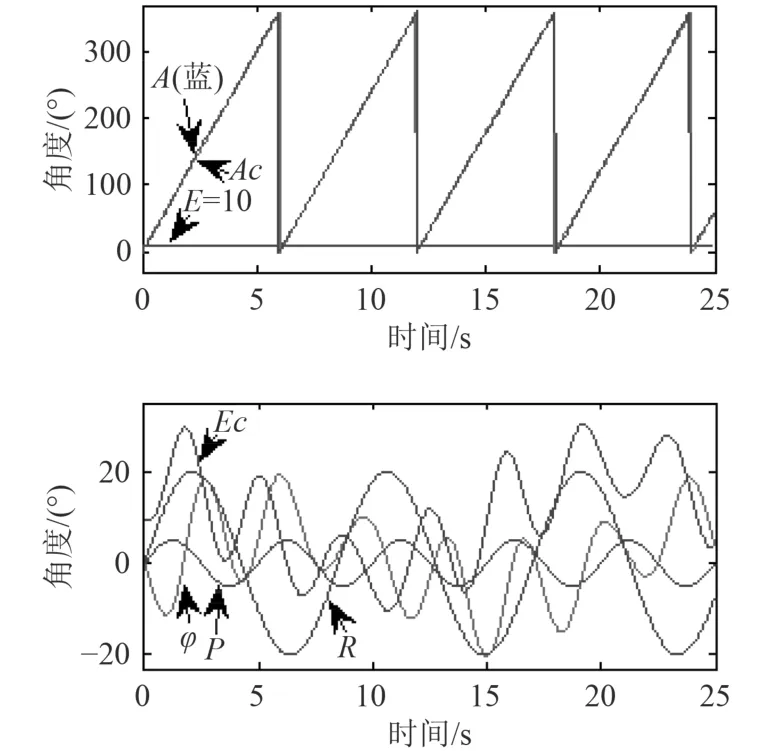
图6 两轴转台系统数据Fig. 6 Data of the two-shaft-stabilized system
4 结 语
本文推导出已知平台罗经数据(P,R)和雷达天线法线姿态角(A,E)时两轴转台系统稳定方程和波束旋转角 φ 的方程,为舰载雷达两轴转台系统伺服控制和雷达波束相关补偿提供理论依据。
[1]张志远, 罗国富. 舰船姿态坐标变换及稳定补偿分析[J]. 舰船科学技术, 2009, 31 (4): 34–40.
ZHANG Zhi-yuan, LUO Guo-fu. Coordinate transformation of warship pose and analysis of stabilization compensation[J]. Ship Science and Technology, 2009, 31(4): 34–40.
[2]曹正才. 舰载雷达常用稳定方式坐标变换[J]. 雷达与对抗,2010, (3): 47–52.CAO Zheng-cai. The commonly used coordinate transform of stabilization modes for shipborne radars[J]. Radar and Electromagnetic Countermeasure, 2010, (3): 47–52.
[3]曹正才. 雷达波束横倾角计算[J]. 雷达与对抗, 2011, (1):58–60.
CAO Zheng-cai. The calculation of heeling angles of radar beams[J]. Radar and Electromagnetic Countermeasure, 2011,(1): 58–60.
[4]方成一, 王振旺. 舰载雷达天线电子稳定方程的推导方法[J].雷达与对抗, 1999, (2): 68–74.
FANG Cheng-yi, WANG Zhen-wang. Derivation method for electronic steadiness equations of ship-borne radar[J]. Radar and Electromagnetic Countermeasure, 1999, (2): 68–74.
[5]冯同玲, 陈龙潭. 舰载雷达天线电子稳定方程的推导与分析[J]. 火控雷达技术, 2001, 30 (1): 31–36.
FENG Tong-ling, CHEN Long-tan. Derivation and analysis of electronic steadiness equations of ship-borne radar[J]. Fire Control Radar Technology, 2001, 30 (1): 31–36.
[6]王有朝. 对舰艇纵横摇坐标变换的讨论[J]. 现代雷达, 2001,23(4): 27–30.
WANG You-chao. Discussion on coordinates transform of pitch and roll of warship[J]. Modern Radar, 2001, 23(4): 27–30.
[7]黄良兵. 雷达天线稳定平台伺服系统设计与仿真[J]. 现代导航, 2012, 3(3): 196–200.
HUANG Liang-bing. Design and simulation on radar antenna stabilized platform servo system[J]. Modern Navigation, 2012,3(3): 196–200.
[8]苏效民. 两轴稳定方式中牵连运动的补偿[J]. 火控雷达技术.2003, 9(23): 1–4.
SU Xiao-min. Compensation for following movements in twoaxis stabilization[J]. Fire Control Radar Technology, 2003,9(23): 1–4.
Steady-state equation derivation for the two-shaft -stabilized platform of the ship-borne radar
LEI Jie, WU Yan, FENG Yuan-yuan
(The 724 Research Institute of CSIC, Nanjing 211153, China)
The mechanical structure for the two-shaft-stabilized platform of the ship-borne radar is simple, which keep the direction of radar beam by controlling the attitude angles of the antenna normal, but the radar beam rotates around the antenna normal when ship swung. The relationship between geodetic coordinate system and ship coordinate system is analyzed,the two -shaft-stabilized system’s attitude angles of the ship-borne radar in ship coordinate system are defined, when the value of platform compass and the ship-borne radar antenna normal’s attitude angles are given, this paper provides a way to the two-shaft -stabilized system’s steady-state equations and the radar beam’s rotation angle equation by use of space analytic geometry method, which provides a theoretical basis for the ship-borne radar serve control and correlative compensation method.
two- shaft -stabilized system;space analytic geometry method;attitude angle;steady-state equation;rotation angle equation
TN959
A
1672 – 7649(2017)10 – 0127 – 05
10.3404/j.issn.1672 – 7649.2017.10.025
2016 – 12 – 05;
2017 – 04 – 01
雷杰(1985 – ),男,硕士,工程师,研究方向为雷达伺服系统。
