海洋浮标发电装置优先工况选择的动力学分析
2017-11-03毛垚飞朱克强钟科星徐庭留张远强
毛垚飞, 朱克强, 夏 峰, 钟科星, 徐庭留, 张远强
(1.宁波大学 海运学院, 浙江 宁波 315211;2.宁波东方电缆股份有限公司,浙江 宁波 315801)
2017-04-27
国家自然科学基金(11272160)
毛垚飞(1991—),男,江西上饶人,硕士生,主要从事船舶与海洋工程结构动态响应研究。E-mail:736730202@qq.com
朱克强(1956—),男,安徽合肥人,教授,博士生导师,主要从事海洋管线、拖曳线列阵等海洋结构物研究。
E-mail: zhukeqiang@nbu.edu.cn
1000-4653(2017)03-0054-04
海洋浮标发电装置优先工况选择的动力学分析
毛垚飞1, 朱克强1, 夏 峰2, 钟科星2, 徐庭留1, 张远强1
(1.宁波大学 海运学院, 浙江 宁波 315211;2.宁波东方电缆股份有限公司,浙江 宁波 315801)
为选择既能使海洋浮标发电装置安全工作又能使其保持最优工作效率的工作海域,参考某型海洋浮标发电装置的具体参数,结合装置工作过程,使用水动力学软件OrcaFlex建立装置工作过程中的动力学分析简化模型。分析在不同波高、不同波浪周期下海洋浮标和动子沿轴向相对定子的位移、速度及缆型装置的张力与弯矩沿缆长方向的分布及变化情况,量化装置在不同海域的工作安全性和工作效率。
海洋浮标; 发电装置; OrcaFlex; 动力学分析; 波高; 波浪周期; 能量转换效率
随着全球能源日益枯竭,对海洋能源进行开发利用成为当今世界能源开发的重点。波浪能以其储量大、分布广和易获取等优势成为重要的海洋环境新能源之一。海洋浮标发电装置是一种新型波浪能转换装置,国内外相关学者[1-10]已针对该装置进行大量分析研究。这里以水动力学软件OrcaFlex为平台,建立海洋浮标发电装置的分析模型,并对其工作状态进行仿真模拟,得到装置在不同海况下的水动力学分析结果。为方便计算,在对该装置进行仿真模拟分析之前,需对环境及装置本身作以下假设:
1) 由于海洋浮标发电装置主要是在波浪、洋流的作用下运行的,进而将动能转化为电能,风对其工作的影响不大,故仅考虑波浪和洋流的作用。
2) 该装置工作时沿多个方向运动,在铅垂方向上下沉浮,随流向绕系泊区域End B摆动。由于洋流的方向在短周期内不变,因此仅考虑一个平面内的类似于复合摆的运动。
为得到较高的发电效率,海洋浮标发电装置会在比较复杂的海域内工作,进而出现急剧摆动的现象,对发电装置的安全工作产生威胁。这里研究如何合理选择既能获得较大能量又能保证装置安全的工作海域。
1 基于OrcaFlex建立模型
1.1环境参数
在选取海洋浮标发电装置的工作海域时,选取装置的极限自存工况,其环境参数为:水平流流速2.03 m/s;有义波高4.8 m。为方便分析,取波流同向的情况进行分析。该海域水温为10 ℃,密度为恒定值1.025×103kg/m3,运动黏滞率为3.5%。在OrcaFlex软件中选取波浪类型为Dean stream,其中Stream function order取10。
1.2模型参数
在OrcaFlex软件中建立海洋浮标发电装置模型(见图1),该模型由3部分组成。
1) 第1部分波浪吸收装置为一个海洋浮标。
2) 第2部分能量转换装置主要依靠动子线圈(以下简称动子)沿定子永磁体(以下简称定子)轴向切割磁场来发电。动子由海洋浮标牵连运动,其具体参数为:外径4.77 m;内径0.7 m;轴向长度14.9 m;法向刚度1×106kN·m2;临界阻率50%。
3) 第3部分固定系泊装置为一条均匀管线,锚固于海床上,其主要参数为:外径0.65 m;内径0.58 m;质量5.31 kg/m;杨氏模量2.12×108kPa;泊松比0.5;轴向破断力1.43×107kN;抗弯刚度6.79×105kN·m2;抗扭刚度4.533 2×105kN·m2。
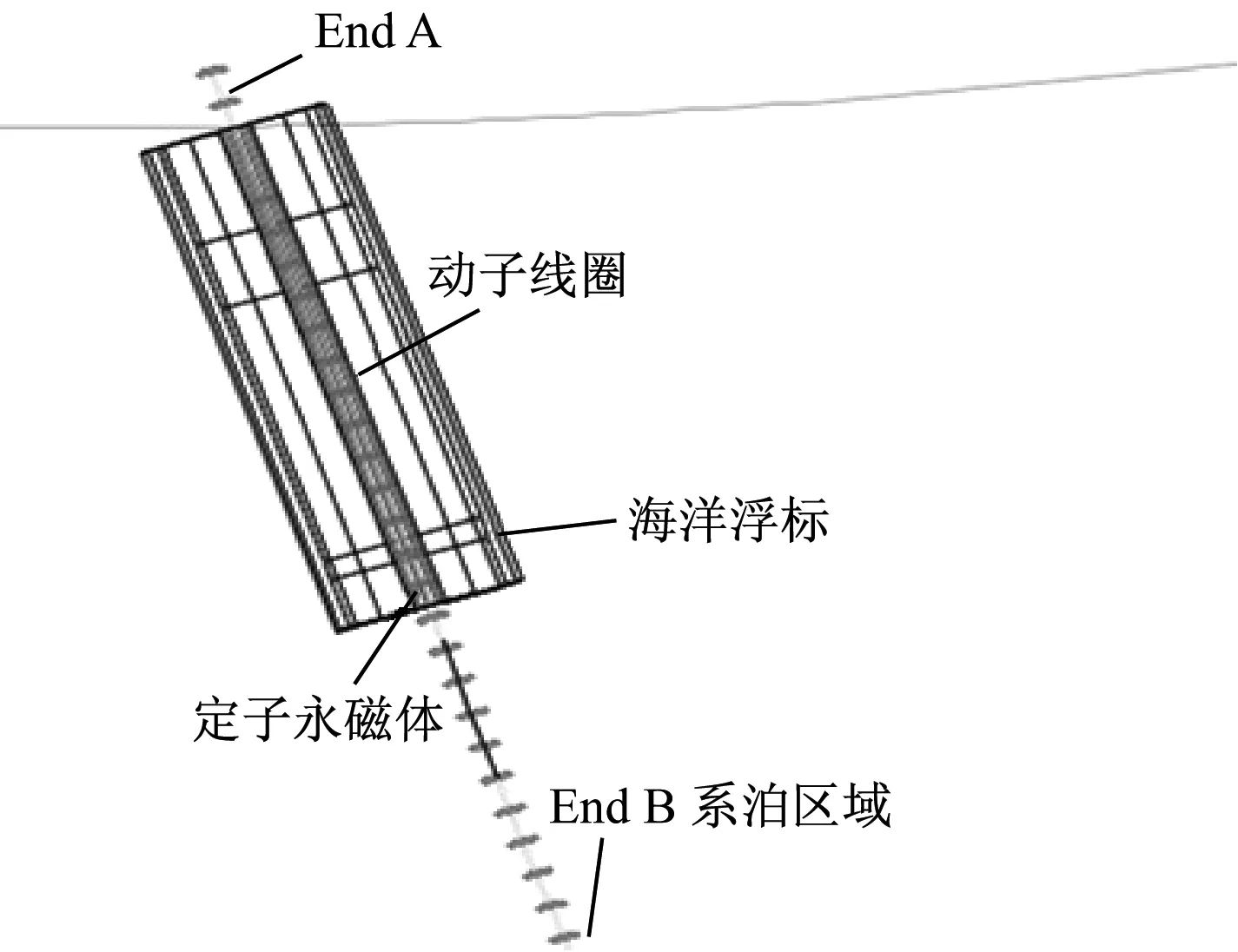
图1 海洋浮标发电装置模型
在实际工作中,定子与锚固装置固结于一条缆上,故合并两者简称缆型装置。在仿真模拟中,缆型装置在性能上类似于一个非线性弹簧。将其离散为凝集质量模型,由若干个无质量、连续的分段组成,各分段由旋转的轴向弹簧及阻尼器组成,中点分布着节点,且都视为一个连续、无质量的缆单元。因此,在该仿真中仅需考虑缆型装置的轴向特性及扭转响应。海洋浮标的运动状态与发电机所处的海洋环境及装置具体参数存在着复杂的相互约束关系。发电机运行时,主要受到浮力Ffd,浮标自重G及反电磁力Fd等3个力的作用。浮筒所受合力为
∑F=Ffd-G-Fd
(1)

(2)
(3)

(4)
式(1)~式(4)中:S(t)为浮标运动的位移函数;m为质量;ρ为密度;b为等效边长;r为半径;λ为波长;A为波高;ω为波浪角频率;C为电磁阻力系数。
综合式(1)~式(4),装置启动的工作状态要求是浮标的合外力∑F≥0。根据各工作海域不同的海况环境,可初步得到装置的最小启动波高。
2 计算结果及分析
针对不同周期(T=4 s,5 s,6 s,8 s,9.5 s,10 s,11 s)和不同波高(H=2 m,2.4 m,2.8 m,3.2 m,3.6 m,4.0 m,4.4 m,4.8 m)的几类工作海况,分析波浪对装置工作性能及其安全性的影响。
2.1波周期变化对装置及其工作的影响
根据装置的实际参数,由于定子的长度一定,对浮标位移有一定的限制,浮标相对静置原始位置位移上限为2 m,下限为1 m,超出该限制范围会导致装置无法有效工作,甚至遭到破坏。
图2为不同波周期情况下的位移响应。由图2可知:在波浪的作用下,动子相对定子在时域内作振幅逐渐增大的不规则振动;不同波周期下振动的相位有所偏移。

图2 不同波周期情况下的位移响应
图3为不同波周期相对位移极值。由图3可知:波浪周期由11.0 s降低至4.0 s(极限工作周期),波浪环境逐渐复杂,未发现动子相对定子轴向位移变化与波周期变化线性相关;波周期为11.0 s时,动子绝对位移值为0.903 58 m,随着波周期的缩短,绝对位移值逐渐增大,当波周期为8.0 s时达到最大;当波周期为9.5 s,8.0 s,6.0 s时,位移的上限最大值超出装置本身的许用上限,会造成装置做无用功,甚至遭到破坏;在整个模拟周期范围内并未出现位移下限最大值超出装置的许用下限的情况。

图3 不同波周期相对位移极值
动子轴向振动速度变化反映动子因切割定子的磁场而将波浪能转化为电能的发电效率。图4为不同波周期动子速度极值。由图4可知:波周期由11.0 s降低至4.0 s过程中,轴向振动速度与波周期变化并未呈现线性相关的关系;随着波周期的缩短,装置动子轴向振动速度极值逐渐增大,当波周期为8.0 s时达到最大值1.137 3 m/s,而后逐渐减小。

图4 不同波周期动子速度极值
讨论装置各部分的结构强度,动子由于海洋浮标的保护而在正常工作情况下不会出现结构破坏的情况,故主要讨论不同波浪周期下缆型装置的结构安全及工作状态下的动力学响应。图5为不同波周期下缆型装置张力响应。由图5可知:各波周期下缆型装置的张力分布、变化曲线趋势是类似的;最上端End A区域张力值接近0,沿缆长向海床方向越往下,缆的张力越大,在距离End A端15~21 m范围内急剧变大,最后在距离End A端26.5 m处达到最大。造成张力急剧变大的原因为:0~15 m区间位于动子与定子接触的区间内,在工作时,缆型装置仅受发电机产生的反电磁力的作用,其余未受海洋浮标包裹保护的缆型装置还要承受海洋环境施予的一系列载荷,故该区域的张力急剧变大;系泊区域(距离End A端26.5 m左右范围)需承担将装置固定在海床上的任务,保证装置工作时不产生破坏性位移,因此该区域系泊张力最大,是整个系泊装置的系泊张力危险区域,该区域的抗拉强度需加强;在波周期由11.0 s降低至4.0 s的过程中,缆型装置的张力最大值随着波周期的减小而增大。

图5 不同波周期下缆型装置张力响应
图6为不同波周期下缆型装置弯矩响应。由图6可知:各波周期下缆型装置的弯矩分布、变化曲线相似;最上端End A端区域弯矩值接近0,沿缆长向海床方向越往下,缆的弯矩越大,一般在距离End A端10~20 m区间内达到最大,到系泊点End B区域时减小为0;随着波周期的增大,装置所受弯矩有较大幅度的增大;弯矩最大值所在位置在海洋浮标下边缘与定子接触的区间内,说明发电装置内部组件的相互作用影响弯矩的变化,故该区域变化波动最为剧烈。综合上述讨论可知,波周期的变化对缆型装置弯矩的大小分布及变化情况有较大影响。

图6 不同波周期情况下缆型装置弯矩响应
2.2波高变化对装置及其工作的影响
图7为不同波高海况下动子相对定子轴向位移在时域内的模拟结果。由图7可知:在波浪的作用下,动子相对定子在模拟时域内作振幅逐渐增大的不规则振动;由于波浪周期一定,该振动的相位一定,随着波高的升高,振幅有较大提升。出现该现象的原因为:发电装置动子在定子轴向上的位移主要是在铅垂方向上的位移,单位波的简谐运动是动子在铅垂方向出现位移的主要能量来源,因此波高变化对动子轴向位移变化有较大影响。
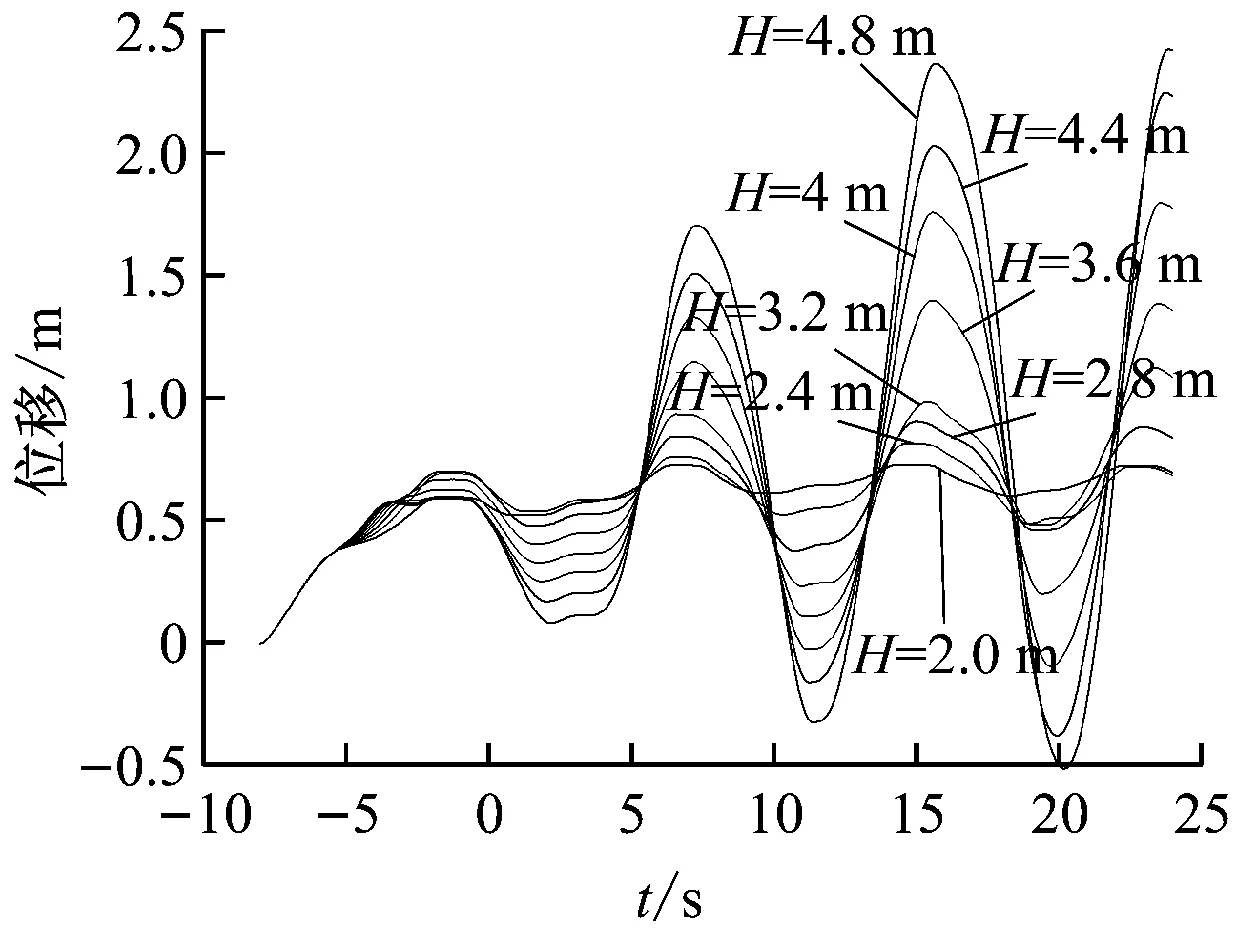
图7 不同波高情况下位移响应
图8为不同波高时相对位移极值情况。由图8可知:在波高由2.0 m增加至4.8 m自存工况的过程中,单位波浪能量提高,动子相对定子轴向位移极值随着波高的增大而增大;当波高>4.4 m之后,位移的上限最大值超出装置本身的许用上限;在整个模拟波高范围内并未出现位移下限最大值超出装置的许用下限的情况;当波高较小时,海洋浮标轴向振动位移较小;当波高小于该海域装置最小启动波高时,装置无法启动。因此,该装置不能选择波高过小的海域。

图8 不同波高时相对位移极值情况
图9为不同波高动子速度极值。由图9可知:在波浪的作用下,动子轴向振动速度在模拟时域内的波动较剧烈;在波高由2.0 m增至4.8 m过程中,动子轴向振动速度随波高的增大而增大,装置的工作效率有较大提高。因此,为获取更好的工作效率,该装置应在安全范围内选择波高较大的海域。

图9 不同波高动子速度极值
为使装置在不同波高下满足工作安全性要求,讨论缆型装置在不同波高的工作海域的结构安全及在工作状态下的动力学响应。
图10为不同波周期情况下缆型装置张力响应。由图10可知:各波周期下缆型装置的张力分布、变化曲线趋势类似;波高增大过程中,缆型装置的张力最大值呈增大趋势。张力的增大会使装置的工作安全性受到威胁,故装置需选取一个安全的波高环境,或采取相应措施加强缆型装置。

图10 不同波周期下缆型装置张力响应
图11为不同波周期下缆型装置弯矩响应。由图11可知:各波高情况下缆型装置的弯矩分布、变化曲线基本相似;随着波高的升高,装置所受弯矩有一定幅度的增大;弯矩最大值所在的位置在海洋浮标下边缘与定子接触的区间内。综合上述讨论可知,波高的变化对缆型装置弯矩的大小分布及变化有一定影响。

图11 不同波周期下缆型装置弯矩响应
3 结束语
综合上述分析结果,可得出以下结论:
1) 考虑装置组件结构的限制,装置工作海域波周期处于5~10 s工况下,位移的上限最大值超出装置本身的许用上限,造成装置做无用功甚至遭到破坏,故在选择工作海域时,应采取措施解决位移过大的问题;考虑装置的工作效率,由于动子轴向速度最大海况属于5 ~10 s危险工况,故应在安全工况内选择接近速度最大值对应的海况,以使装置在保证安全的前提下有效提高工作效率;在T=4 s海况下,缆型装置的张力与弯矩都大于其他周期环境。因此,考虑装置的工作安全性,不宜使装置处于周期过短的工作环境内。
2) 考虑装置组件结构的限制,当装置工作海域波高>4.4 m之后,浮标位移的上限最大值超出装置本身的许用上限;当波高小于该海域装置最小启动波高时,装置无法启动。因此,该装置不能选择波高过大或过小的海域;考虑装置的工作效率,波高较大的海域可提高装置的工作效率;在H=4.8 m海况下,缆型装置的张力和弯矩都远大于其他波高环境。因此,考虑装置的工作安全性,不宜使装置处于波高过大的海域内。
[1] BUDAL K, FALNES J, IVERSEN L C, et al. The Norwegian Wave-Power Buoy Project [C]∥Proceedings of 2nd International Symposium on Wave Energy Utilization, Trondheim,1982:323-344.
[2] WATERS R, STALBERG M, DANIELSSON O, et al. Experimental Results from Sea Trials of an Offshorewave Energy System[J]. Applied Physics Letters, 2007, 90(3): 223.
[3] JOHNSON K, KERR S, SIDE J. Accommodating Wave and Tidal Energy-Control and Decision in Scotland[J].Ocean & Coastal Management,2012(65):26-33.
[4] Wave Dragon Aps. Wave Dragon [EB/OL]. [2014-07-15]. http://www. wavedragon.net.
[5] WU Bijun, LIN Hongjun, YOU Yage, et al. Study on Two Optimizingmethods of Oscillating Type Wave Energy Conversion Devices[J]. Acta Energiae SolarisSinica, 2010,31(6):769-774.
[6] 张大朋, 朱克强. 串联式波浪发电装置系留系统动力学分析[J]. 应用力学学报, 2016, 33(1):30-35.
[7] 赵海涛.浮力摆式波浪能装置的水动力性能研究[D].杭州:浙江大学,2012.
[8] 马哲.振荡浮子式波浪发电装置的水动力学特性研究[D].青岛:中国海洋大学,2013.
[9] 邵波,曹志彤,徐月同,等. 每极每相槽数小于 1 的 永磁直线同步发电机负载及其参数的有限元分析[J]. 机械工程学报,2008,44(2):124-128.
[10] 李德源,刘胜祥,张湘伟. 海上风力机在风波联合作 用下的动力响应数值分析[J]. 机械工程学报,2009, 45(12):46-52.
DynamicAnalysisforSelectionofPreferableOperatingModeforConversionDeviceofOceanBuoys
MAOYaofei1,ZHUKeqiang1,XIAFeng2,ZHONGKexing2,XUTingliu1,ZHANGYuanqiang1
(1.Faculty of Maritime and Transportation, Ningbo University, Ningbo 315211, China; 2.Ningbo Orient Wires & Cables Co., Ltd., Ningbo 315801, China)
In order to select a working location in the sea where conversion device of ocean buoys will work with both optimal safety and efficiency. With OrcaFlex a simplified dynamic Analysis model of the device operation is built based on the specific working process and parameters of a typical conversion device of ocean buoys. The movement of the device under different significant wave heights and wave periods is analyzed in order to determine the relative displacement and velocity of motor mover as well as the distribution and change of the tension and the bending moment along the cable. The safety performance and work efficiency of the device are predicted in different sea areas quantitatively.
ocean buoy; conversion device; OrcaFlex; dynamic analysis; wave height; wave period; energy conversion efficiency
TM612;P743.2
A
