PEMFC-Boost系统滑模控制策略研究
2017-11-02严豪杰王金全
严豪杰,徐 晔,王金全,许 磊
(解放军理工大学 国防工程学院,江苏 南京 210007)
PEMFC-Boost系统滑模控制策略研究
严豪杰,徐 晔,王金全,许 磊
(解放军理工大学 国防工程学院,江苏 南京 210007)
为实现对PEMFC-Boost变换器非线性行为的有效控制,改善系统输出性能,依据滑模控制基本原理,设计了PEMFC-Boost变换器系统滑模控制电路。根据所设计的控制电路,在MATLAB 软件中搭建了滑模控制仿真电路,将滑模控制仿真模型与PEMFC-Boost系统仿真相结合,形成了PEMFC-Boost变换器滑模控制仿真模型。最后,通过仿真对比分析了滑模控制与一般PI控制的控制效果,研究了系统电压扰动和负载扰动对滑模控制效果的影响。
PEMFC;Boost变换器;滑模控制
0 引言
质子交换膜燃料电池(Proton Exchange Membrance Fuel Cell, PEMFC)作为微电网中一种典型的分布式电源,具有能量转化效率高、工作温度低、对环境污染小等特点,具有很好的发展前景[1-2]。但燃料电池输出电压稳定性差,在输入氢氧浓度、温度以及负载等发生变化时,其输出电压都会产生波动,无法直接对负载供电[3-4],因此合理地设计PEMFC前级DC/DC变换器的控制策略,对燃料电池稳定运行具有重要的意义[5-6]。
目前,已有许多文献对变换器控制策略进行了研究。文献[7]以开关变换器中Buck电路为研究对象,设计了Buck电路的滑模控制策略。文献[8]基于一种Super-Twisting高阶滑模控制算法,设计了以TMS320F28035为控制核心的无抖颤、强鲁棒滑模电源变换器。文献[9]通过对Boost变换器稳态平衡点的计算 ,研究了Boost变换器的时变滑模控制方法。文献[10-11]用齐次性方法阐述任意阶滑模控制器有限时间内收敛的稳定性。文献[12]提出了一种基于李导数的自适应任意阶滑模控制器,并通过仿真验证了其有效性,但该任意阶滑模控制器必须确定系统不确定函数的界,使系统最终完全收敛。以上文献表明,滑模控制已经逐渐成为开关变换器非线性控制最主要的一种方法。但现有的文献只是单一地针对具体的开关变换器,并没有考虑到变换器前级分布式电源输出具有间歇性、随机性等特点。因此,在研究变换器控制策略时应该将分布式电源和变换器结合起来进行研究。
本文针对PEMFC-Boost系统输出电压稳定性较差的特点,依据滑模控制原理设计了PEMFC-Boost系统滑模控制电路。在MATLAB软件中搭建了系统仿真模型,研究了电压扰动和负载扰动对滑模控制策略的影响,通过与传统控制方法的比较,验证了本文所设计控制电路的有效性和稳定性。
1 PEMFC-Boost变换器滑模控制器设计
基于滑模控制后PEMFC-Boost系统拓扑图如图1所示。

图1 基于滑模控制的PEMFC-Boost系统拓扑图
其中Boost变换器状态方程可表示为:
(1)
式中,u为开关信号占空比,其应在0~1之间变化,仿真和实验室有必要对控制器输出进行限幅。
Boost变换器系统建模是采用状态空间平均法,系统中存在电感和电容两个储能元件,则系统中总能量可表示为[13]:
(2)
(3)
Boost系统的稳态平衡点为:
(4)
则系统总能量在稳态时是常量,用yd表示:
(5)
因此,可以通过考虑系统的储能为稳态势的常量值,进而控制Boost变换器的输出电压。
设计系统滑模面S为[14]:
(6)
式中,α>0;p和q均为正奇数,且p>q。

(7)

(8)
2 PEMFC-Boost变换器滑模控制器仿真模型
根据前文推导得出的控制信号,在MATLAB/Simulnk环境下搭建控制电路仿真电路,如图2所示。
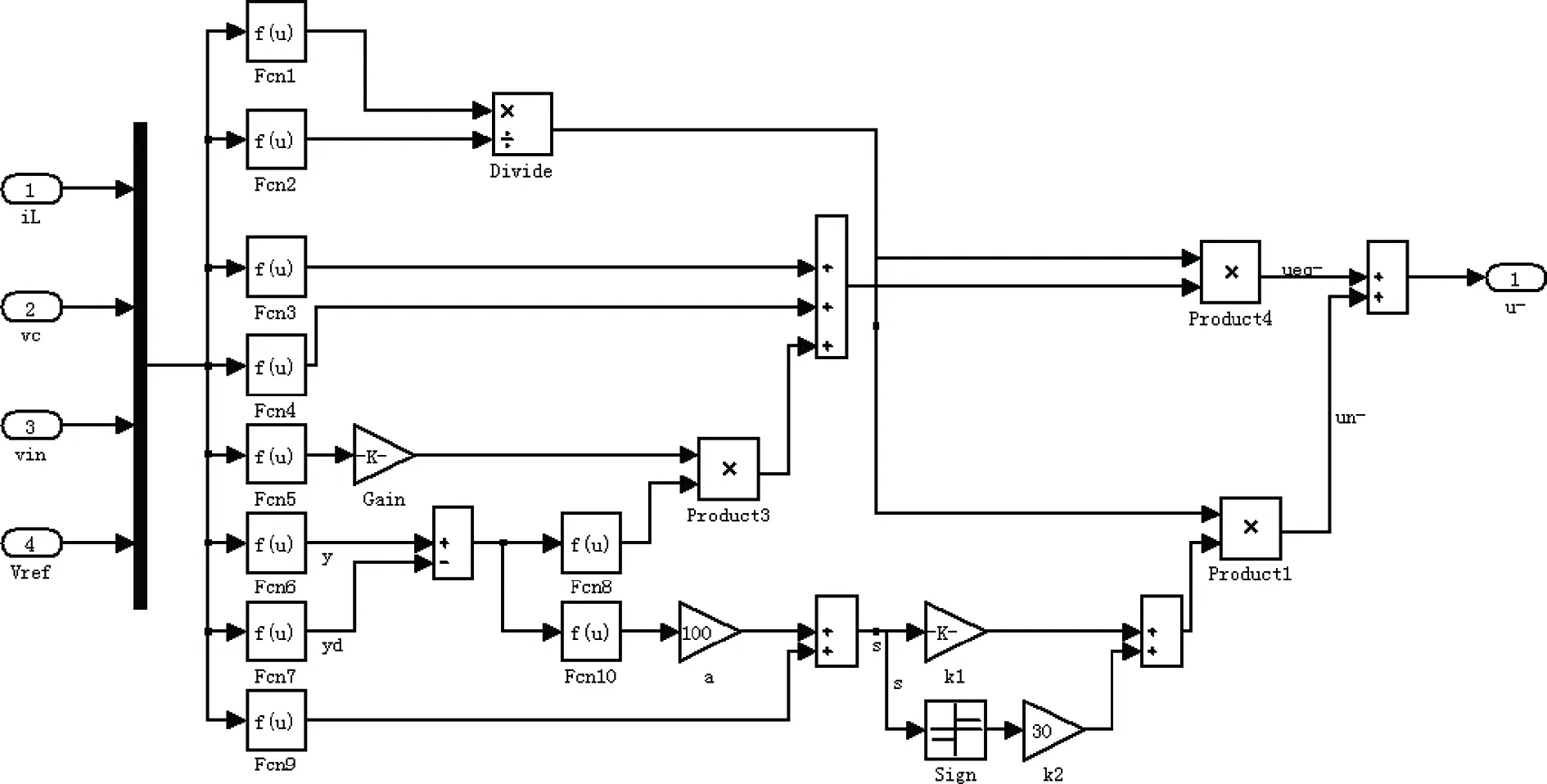
图2 滑模控制仿真电路图
根据设计和搭建的控制电路,在MATLAB/Simulink环境下搭建滑模控制的PEMFC-Boost变换器系统仿真电路,如图3所示。

图3 PEMFC-Boost变换器滑模控制仿真电路图
由图3可知,控制电路输入信号为电感电流、电容电压、Boost变换器输入电压(即PEMFC输出电压 )以及参考电压 ,控制实验组要观测电压扰动以及负载扰动时滑模控制电路对Boost变换器输出电压的控制效果。
3 PEMFC-Boost变换器系统滑模控制效果仿真分析
仿真实验参数如表1所示[12]。
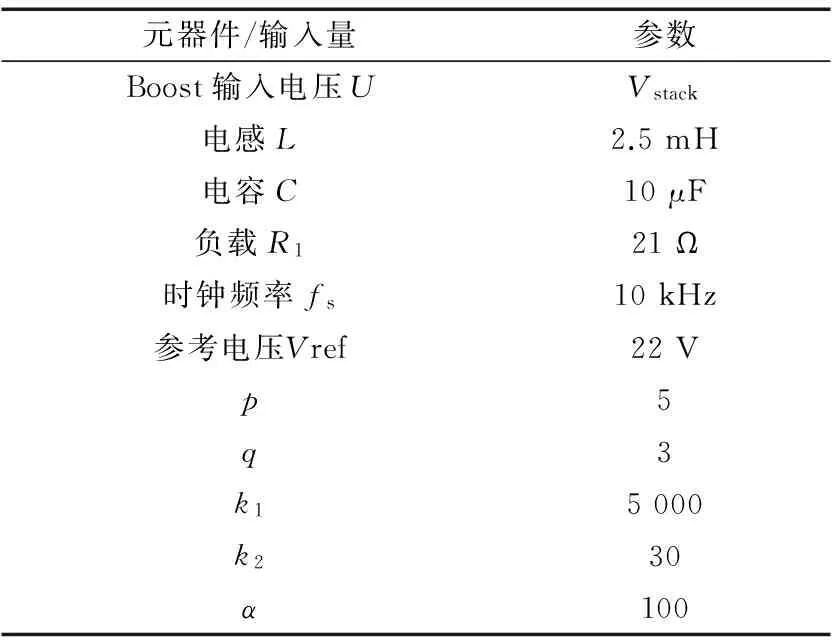
表1 滑模控制仿真参数
通过仿真得到Boost变换器施加滑模控制前后的电压,如图4所示。
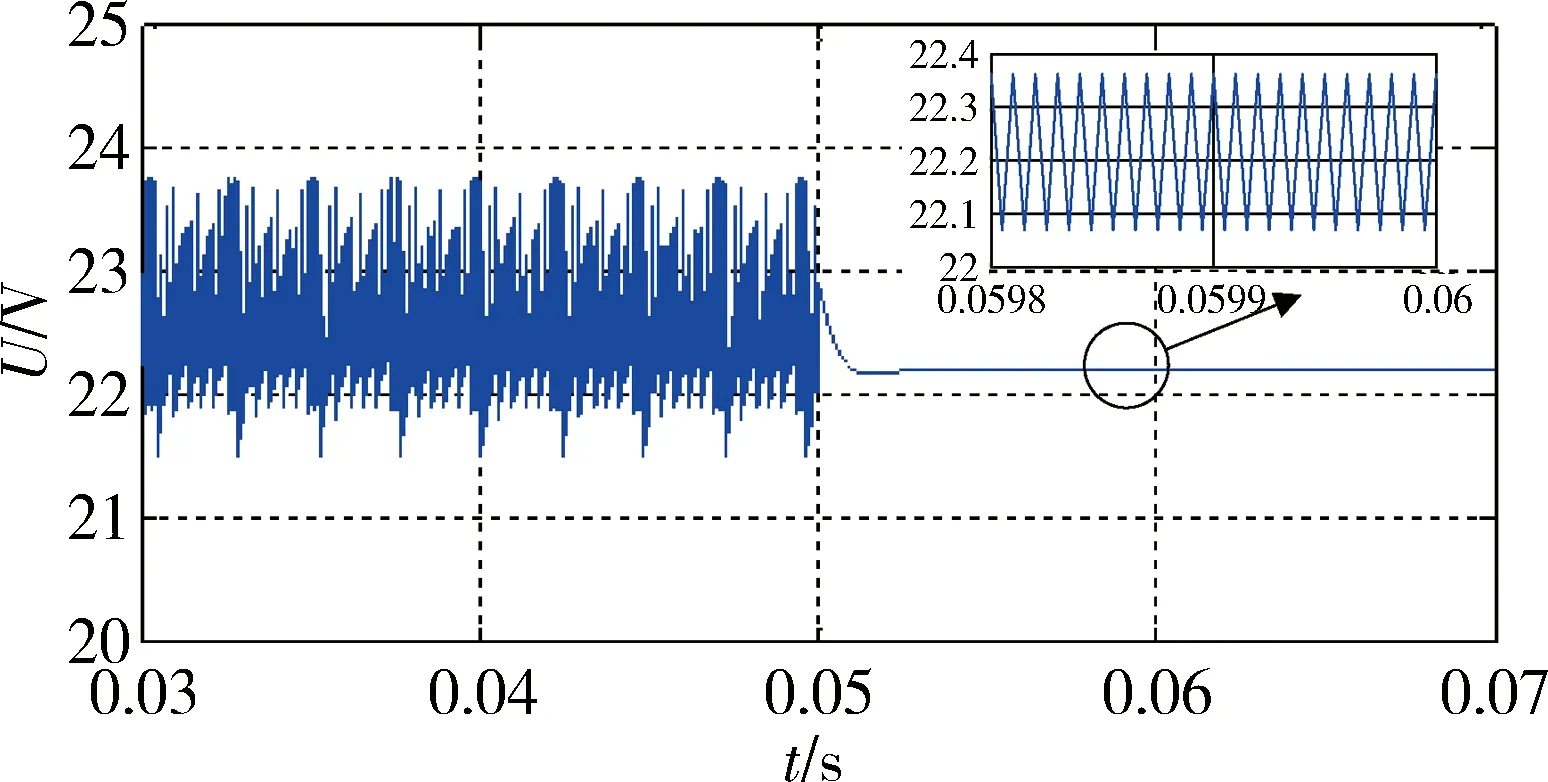
图4 滑模控制施加前后输出电压效果图
由图4可知,在t=0.05 s时,系统施加滑模控制后输出电压变化较为明显。在t<0.05 s时,系统输出电压处于混沌状态,纹波很大且变化没有规律性,系统施加滑模控制后,经过大约0.001 s的时间退出混沌状态稳定运行,系统稳定后纹波非常小(几乎为零),因此能够达到控制混沌的目的,且控制效果较为理想。
电压扰动时,滑模控制对PEMFC-Boost变换器系统输出电压的控制效果如图5所示。
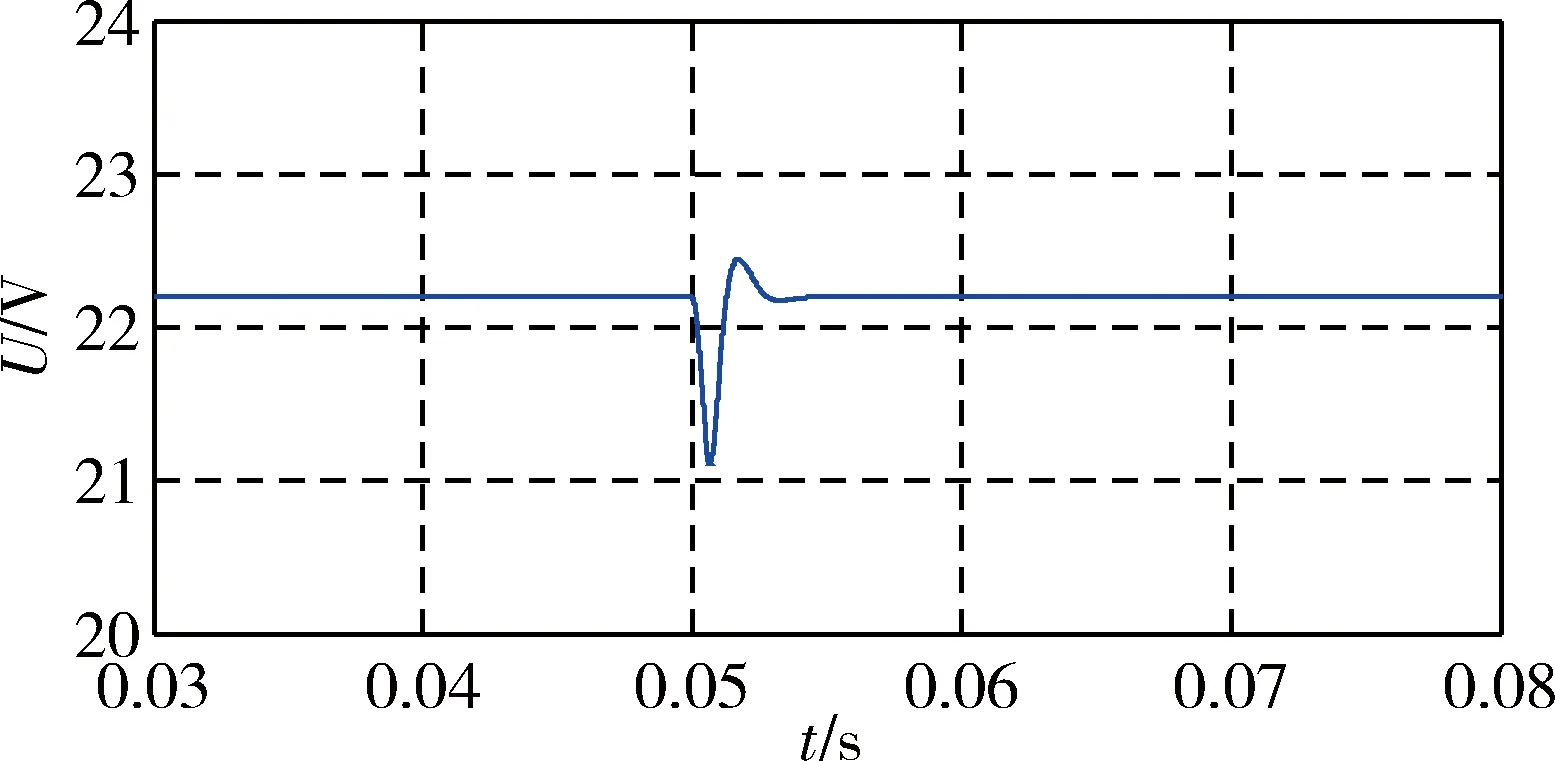
图5 电压扰动控制效果
由图5可知,系统处于稳态运行后,在t=0.05 s时,PEMFC输出电压发生1 V的扰动,系统输出电压也发生1 V左右的扰动,但经过控制电路调节后,系统经过约0.002 s的时间很快恢复稳定状态,可见此系统对输入电压的扰动具有很好的鲁棒性。
负载产生扰动时,滑模控制对PEMFC-Boost变换器系统输出电压的控制效果如图6所示。
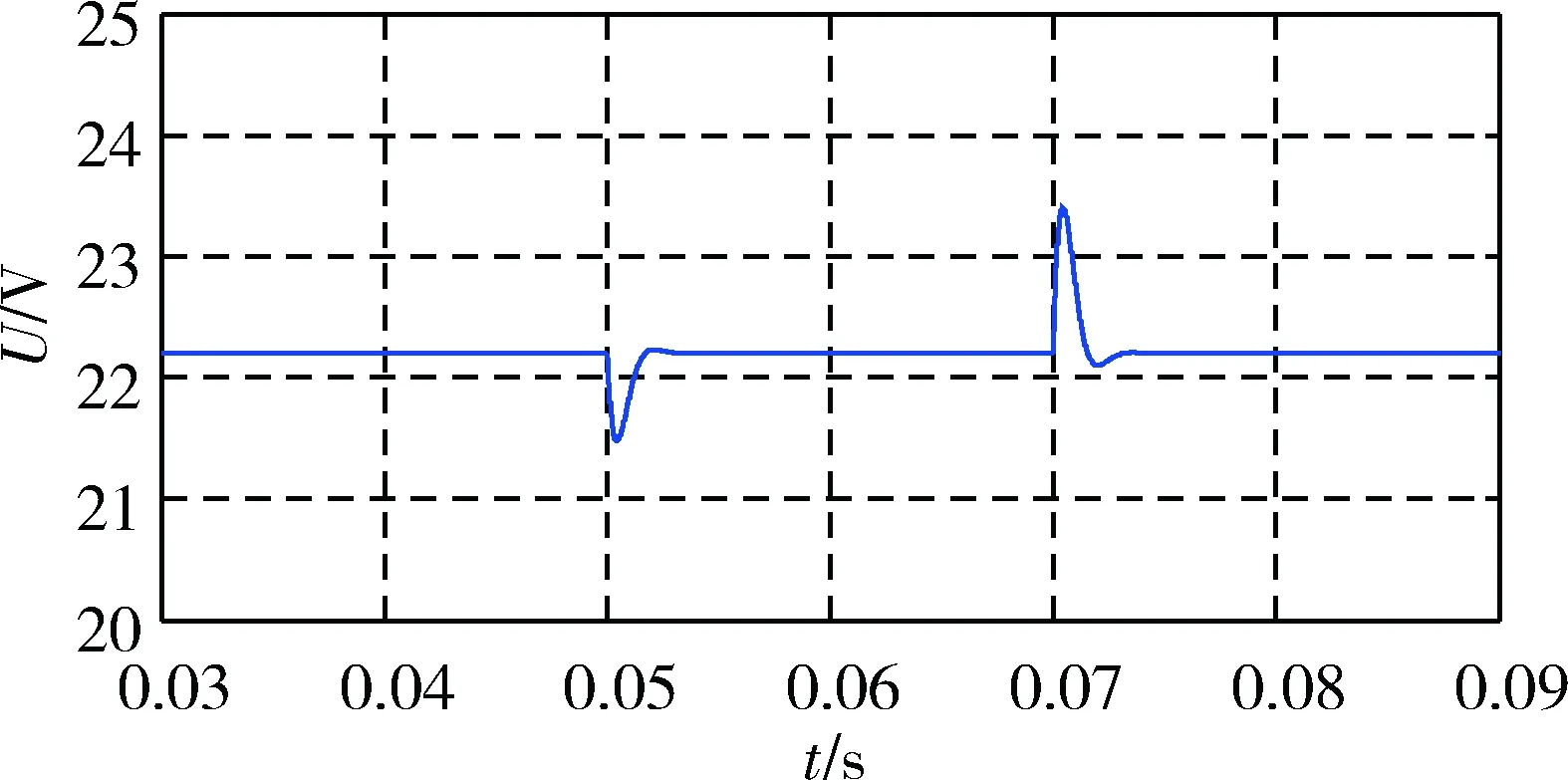
图6 负载扰动控制效果
由图6可知,系统处于稳态运行后,在t=0.05 s和0.07 s时,系统所接负载发生±1 Ω的扰动,系统输出电压也发生约为±1 V的扰动,但经过控制电路调节后,系统经过约0.003 s的时间很快恢复稳定状态,可见此系统对负载的扰动具有很好的鲁棒性。
对微小扰动的极端敏感性是混沌系统的一个主要特征,通过仿真实验可知,所建立的滑模控制策略可以使处于混沌状态的PEMFC-Boost变换器系统恢复到稳定状态,并使系统对电源电压和负载的扰动都具有很好的鲁棒性。
4 结论
本文针对传统Boost变换器控制方法在PEMFC-Boost变换器系统中输出稳定性差的特点,设计了PEMFC-Boost系统滑模控制电路,并在MATLAB软件中搭建了仿真模型,通过仿真研究了系统施加滑模控制策略前后输出电压的特性,以及电压和负载分别发生扰动时,滑模控制对系统输出的影响特性。研究结果表明:(1)PEMFC-Boost变换器系统运行时,滑模控制策略能够很好地稳定系统输出电压,达到控制混沌的效果。(2)在系统发生电压或负载扰动时,本文建立的滑模控制策略可以使处于混沌状态的PEMFC-Boost变换器系统恢复到稳定状态,并使系统对电源电压和负载的扰动都具有很好的鲁棒性。
[1] 王玲, 李欣然, 马亚辉, 等. 燃料电池发电系统的机电动态模型[J].中国电机工程学报, 2011, 31(22): 81-86.
[2] 彭飞, 赵元哲, 陈维荣. 基于质子交换膜燃料电池的交直流耦合SQ并网控制方法[J]. 电力系统自动化, 2013, 37(24): 12-18.
[3] MAJUMDER R. A Hybrid microgrid with DC connectionat back to back converters[J]. IEEE Transactions on Smart Grid,2014,5(1):251-259.
[4] Lu Xiaonan, GUERRERO J M, Sun Kai. An improved droop control method for DC microgrids based on low bandwidth communication with DC bus voltage restoration and enhanced current sharing accuracy[J]. IEEE Transactions on Power Electronics,2014,29(4):1800-1812.
[5] 余达太, 马欣. 一种用于改善燃料电池动态特性的模糊控制系统[J]. 电子技术应用, 2009,35(2): 68-70.
[6] 宋英睿,詹跃东. 质子交换膜燃料电池控制器的设计[J]. 微型机与应用,2010,29(21):100-102.
[7] 孙文静. Buck型DC-DC变换器的滑模控制研究[D]. 北京:北京交通大学, 2015.
[8] 吴宇, 皇甫宜耿, 张琳, 等. 大扰动Buck-Boost变换器的鲁棒高阶滑模控制[J]. 中国电机工程学报, 2015,38(7): 1740-1748.
[9] 周宇飞,丘水生. Boost变换器滑模控制方法及其实验研究[J]. 电力电子技术,2001,35(2):42-44.
[10] LEVANT A. Higher-order sliding modes differentiation and output feedback control[J]. International Journal of Control, 2003, 76(9-10): 924-941.
[11] LEVANT A. Homogeneity approach to high-order sliding mode design[J]. Automatica, 2005, 41(5): 823-830.
[12] HARMOUCHE M, LAGHROUCHE S, CHITOUR Y. Robust and adaptive Higher Order Sliding mode controllers[C]. 2012 IEEE 51st Annual Conference on IEEE Decision and Control (CDC), Malli, Hawaii, 2012: 6436-6441.
[13] 涂文娟,丘东元,张波.DC/DC谐振开关电容变换器潜电路发生的一般规律分析[J].电工技术学报,2007,22(12):98-103.
[14] 何金梅, 郑雪梅, 王卫, 等. Boost 变换器混沌现象的非奇异终端滑模控制方法[J]. 电工技术学报, 2013, 28(4): 104-108.
Research on sliding mode control strategy of PEMFC-Boost system
Yan Haojie, Xu Ye, Wang Jinquan, Xu Lei
(National Defense Engineering Institute, PLA University of Science & Technology, Nanjing 210007, China)
In order to realize the effective control of the nonlinear behavior of PEMFC-Boost converter and improve the system output performance, based on the basic principle of sliding mode control, the sliding mode control circuit of PEMFC-Boost converter system is designed. According to the control circuit designed, the sliding mode control simulation circuit is built in MATLAB software. The sliding mode control simulation model is combined with PEMFC-Boost system simulation to form a sliding mode control simulation model of PEMFC-Boost converter. Finally, the control effect of sliding mode control and general PI control is analyzed by simulation, and the influence of system voltage disturbance and load disturbance on sliding mode control effect is studied.
PEMFC; Boost converter; sliding mode control
TM771
A
10.19358/j.issn.1674- 7720.2017.20.024
严豪杰,徐晔,王金全,等.PEMFC-Boost系统滑模控制策略研究[J].微型机与应用,2017,36(20):84-86,91.
2017-03-26)
严豪杰(1992-),男,硕士研究生,主要研究方向:并网逆变器控制技术研究。
徐 晔(1965-),女,硕士,副教授,主要研究方向:新能源发电技术及智能微电网。
王金全(1963-),男,博士,教授,主要研究方向:新能源发电技术及智能微电网。