船载“动中通”伺服系统控制电路的硬件设计
2017-11-02陈庆超
陈庆超
(南京邮电大学 通信与信息工程学院, 江苏 南京 210003)
船载“动中通”伺服系统控制电路的硬件设计
陈庆超
(南京邮电大学 通信与信息工程学院, 江苏 南京 210003)
船载“动中通”地球站的整个硬件系统的组成包括伺服分系统、天馈分系统和监控分系统三大分系统。本设计主要完成的工作是以STM32为基础,实现对船载“动中通”地球站下位机伺服系统的硬件控制电路的研究与设计。以硬件设计为主线,介绍了“动中通”伺服系统的控制电路具体的设计和实现,包括硬件的选型和电路图的设计。
船载“动中通”;伺服系统;STM32
0 引言
当今社会是高速发展的信息化社会,人们对于通信的依赖性变得越来越强,通信方式也变得越来越多样化,因而通信方式选择也变得尤为重要。随着无线通信技术的飞速发展,通信方式也变得越来越多样化。而卫星通信由于其不受地域限制、通信范围广以及较为灵活的机动性等特点,在通信领域占据着非常重要的地位,尤其是在海洋通信领域内,卫星通信因为其不需要地面基站这一特点,更是有着其他的通信方式无法替代的地位[1-2]。
通常所使用的卫星通信地球站可以分为两种,一种是固定式地球站,一种是移动式接收站,“动中通”便是一种移动式的地面接收站。由于船载“动中通”是放在船上使用的,在整个通信的过程中,船体始终在晃动,而为了获取稳定连续的卫星通信信号,就要保证接收站能够始终对准卫星。因此必须引进伺服系统,将接收站和船体的运动进行隔离,从而消除船体运动以及其他运动因素的影响,保证天线能够始终对准卫星[3-8]。
1 系统功能
“动中通”的伺服系统也是通常所说的跟踪系统,它通过接收、分析和处理所有安装在接收站上的传感器的数据,获取天线的实时的姿态信息,根据情况对天线做出调整控制,最终实现对天线的跟踪[3]。
“动中通”伺服系统的主要功能如下:
(1)完成对“动中通”地球站姿态信息的测量,包括地球站的方位角、俯仰角和横摇角的测量,还包括地球站在三轴方向上的转速和地理位置信息的测量,其中地球站的姿态信息可通过传感器获取,地理位置信息可通过GPS获取[2]。
(2)地球站控制信号输出,包括各个电机的控制信号。
(3)通过RS485串行接口与上位机之间的通信。一方面可以收到上位机发送过来的控制命令,另一方面将地球站的各种信息发送给上位机。
2 硬件设计
2.1 伺服系统硬件模块整体设计
伺服系统硬件设计整体框图如图1所示。
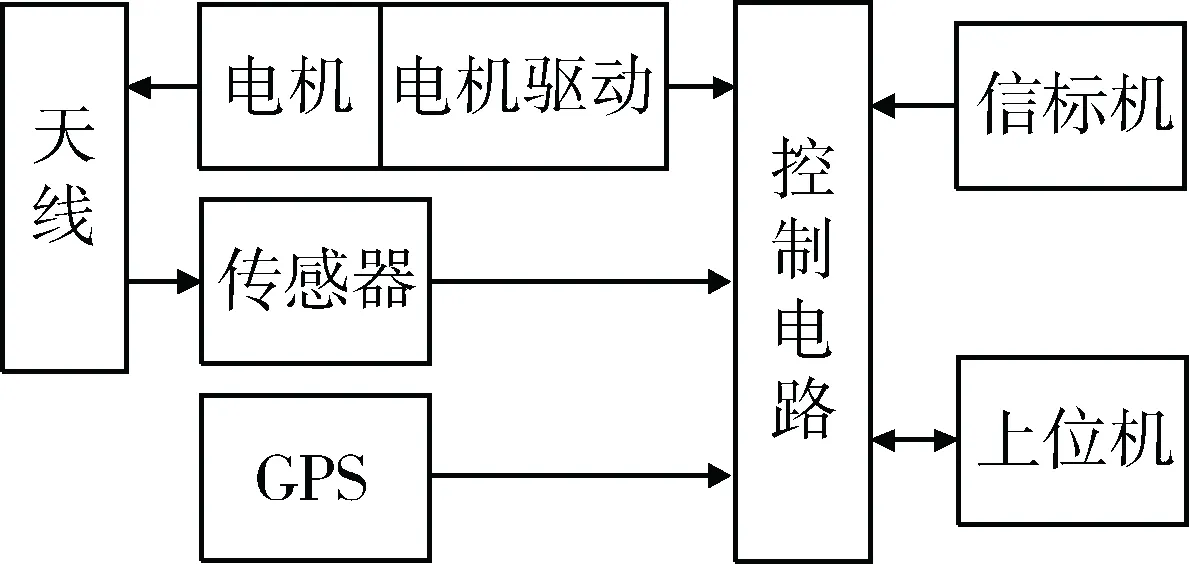
图1 伺服系统硬件模块整体框图
2.2 CPU控制单元
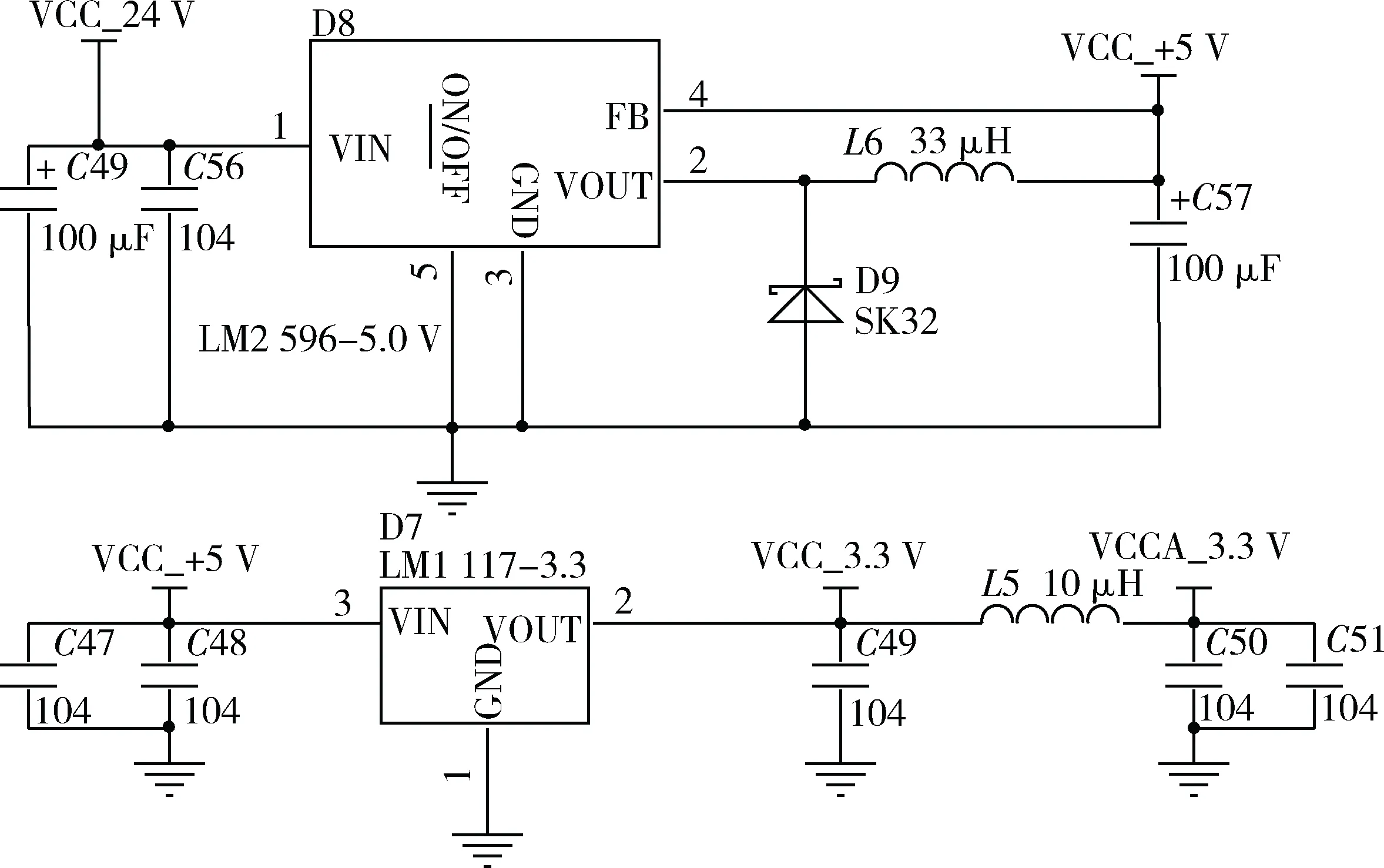
图3 电源模块
本设计不再使用以往所使用的51系列的单片机作为控制芯片,而是选用功能更加强大的STM32系列为核心控制单元,具体选用的是STM32F407VET6型号,与51系列单片机相比,STM32运算更高,功能也更加的丰富[6]。如图1所示,伺服系统的控制电路拥有比较多的外接设备,包括电机驱动、信标机、GPS、传感器模块以及与上位机的通信。其中信标机、GPS、传感器以及和上位机的通信均需要通过串口来实现,51系列的单片机串口资源较少,需要通过串口的分时复用才能满足要求,而STM32拥有较多的串口资源,所以通过无需复用便可实现所有的串口通信目标[4]。并且STM32处理速度相较于51单片机要快很多,可以更好地实现对天线的控制调整。在软件程序的编写方面,STM32因其功能齐全、调用便捷的库函数而使得整个开发工作相对于51系列的单片机而言要简单许多。因此本设计选用STM32作为CPU控制单元。
2.3 GPS通信模块
全球定位系统GPS的作用就是提供地球站的地理位置信息。GPS通常安装在跟踪系统上,CPU通过解析从串口发送过来的GPS协议字,可以知道天线所在地的具体位置,即经纬度信息。根据得到的经纬度信息和所需要的卫星的信息,可以计算出对星所需的理论方位角度和理论俯仰角度。
如图2所示,本设计选用的是北斗GPS,即BD-126,BD-126具有标准工业级接口,提供北斗GPS单一定位或混合定位业务。此外,BD-126的体积非常小,仅为16 mm×12.2 mm×2.6 mm,功耗低,具有非常好的灵敏度和定位反应时间[6]。
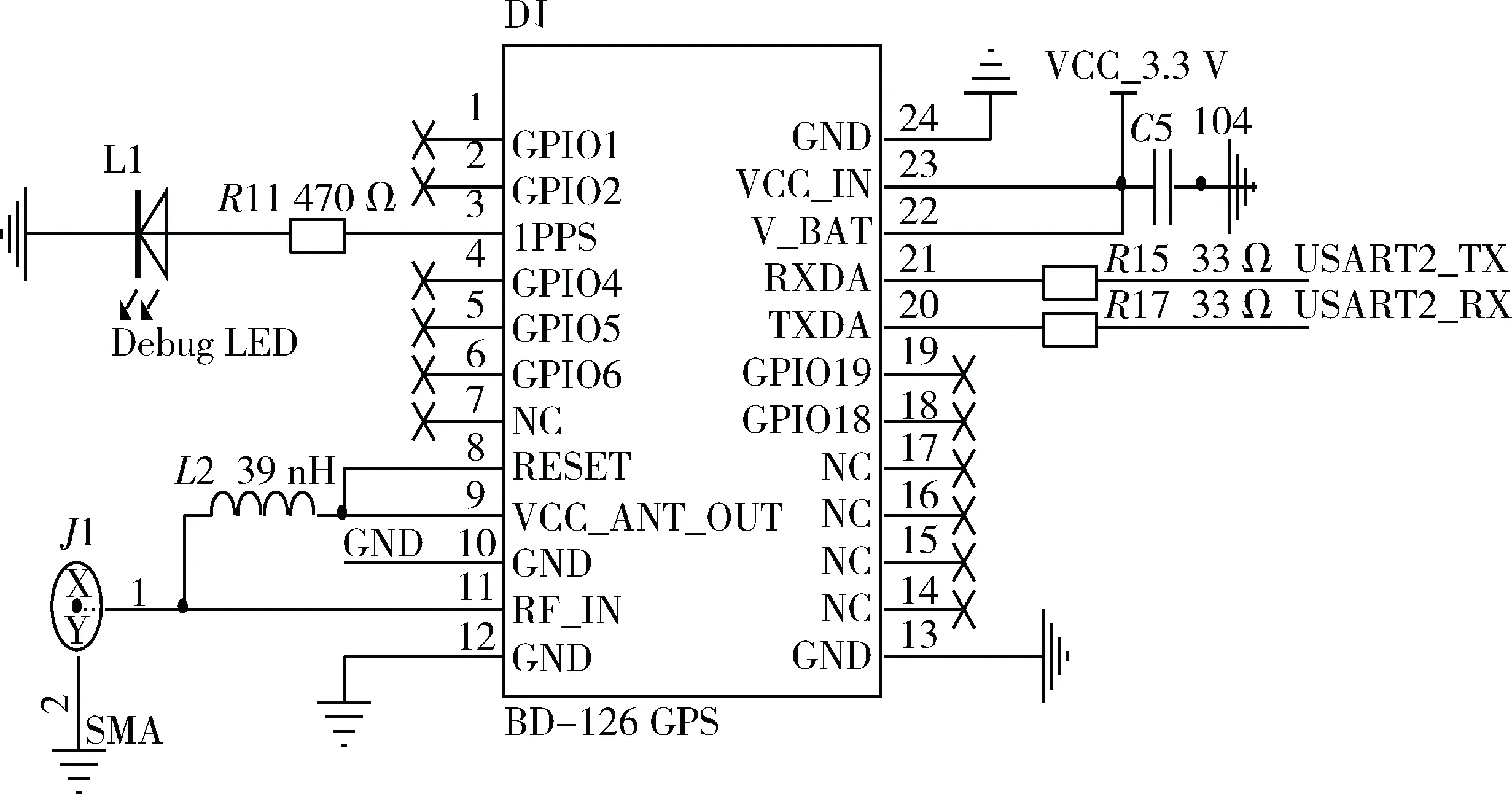
图2 BD-GPS
2.4 电源模块
在天线工作的过程中,电路中的各个模块都需要电源,并且各个模块的电源也不尽相同,比如和上位机通信的RS485模块、GPS和信标机等模块使用的是3.3 V的电源,而电机驱动电路使用的是5 V的电源,还有使用12 V和24 V的电路。所以在电路设计中就需要包含电源转换和稳压电路的设计视线。具体设计如图3所示,此模块包括24 V电源转5 V电源和5 V电源转3.3 V电源。
2.5 电机模块
2.5.1驱动
在整个船载卫星天线的设计中共需要四个电机,分别是方位电机、俯仰电机、横滚电机和极化电机。本电路设计所针对的船载“动中通”的四个电机均为步进电机。步进电机的输入是电脉冲,输出的是电机的转动位移。每当输入一个脉冲信号,电机驱动器接收到后会输送驱动信号给电机,控制电机转动一定的角度。电机转动速度的大小可以有输入电脉冲信号的周期来进行控制,周期越短,频率越高,电机的转速就越快。电机转动的角度的大小可以通过脉冲的个数来进行控制[9]。为方便对步进电机进行控制和简化控制程序的编写,电路采用MC74HCT245N作为步进电机的驱动芯片,如图4所示。MC74HCT245N包含8个具有3态输出的非反相双向缓冲器,适用于面向总线的应用程序。每块驱动芯片可实现对两个步进电机的控制,整个电路共需要两块驱动芯片。
2.5.2码盘
码盘是用来测量角度位移的编码传感器,本设计中使用的是一种增量式正交码盘,是相对式计数的码盘,安装在电机上。码盘的输出为两组相互正交的方波,相位相差90°[5],如图5所示。
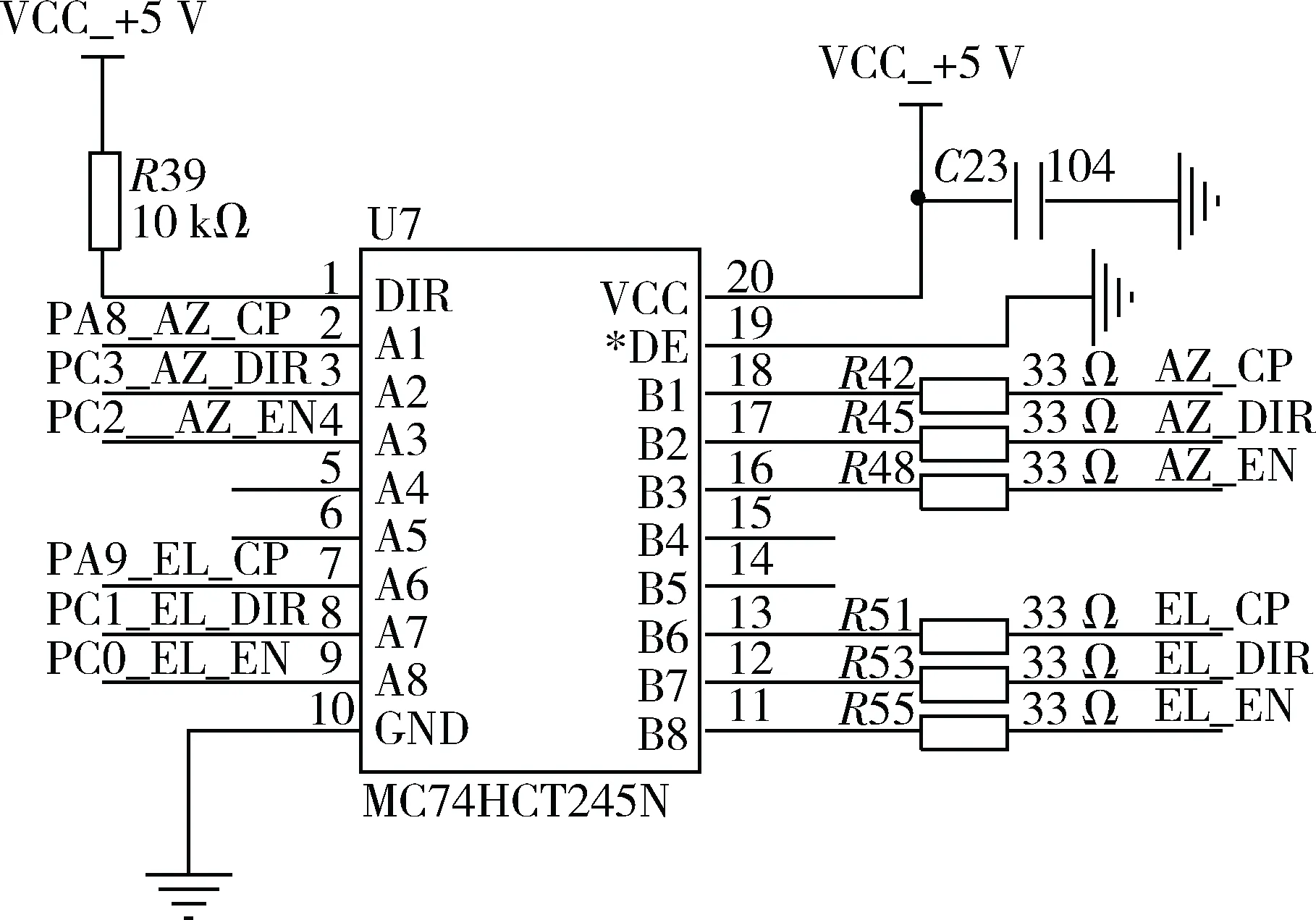
图4 电机驱动
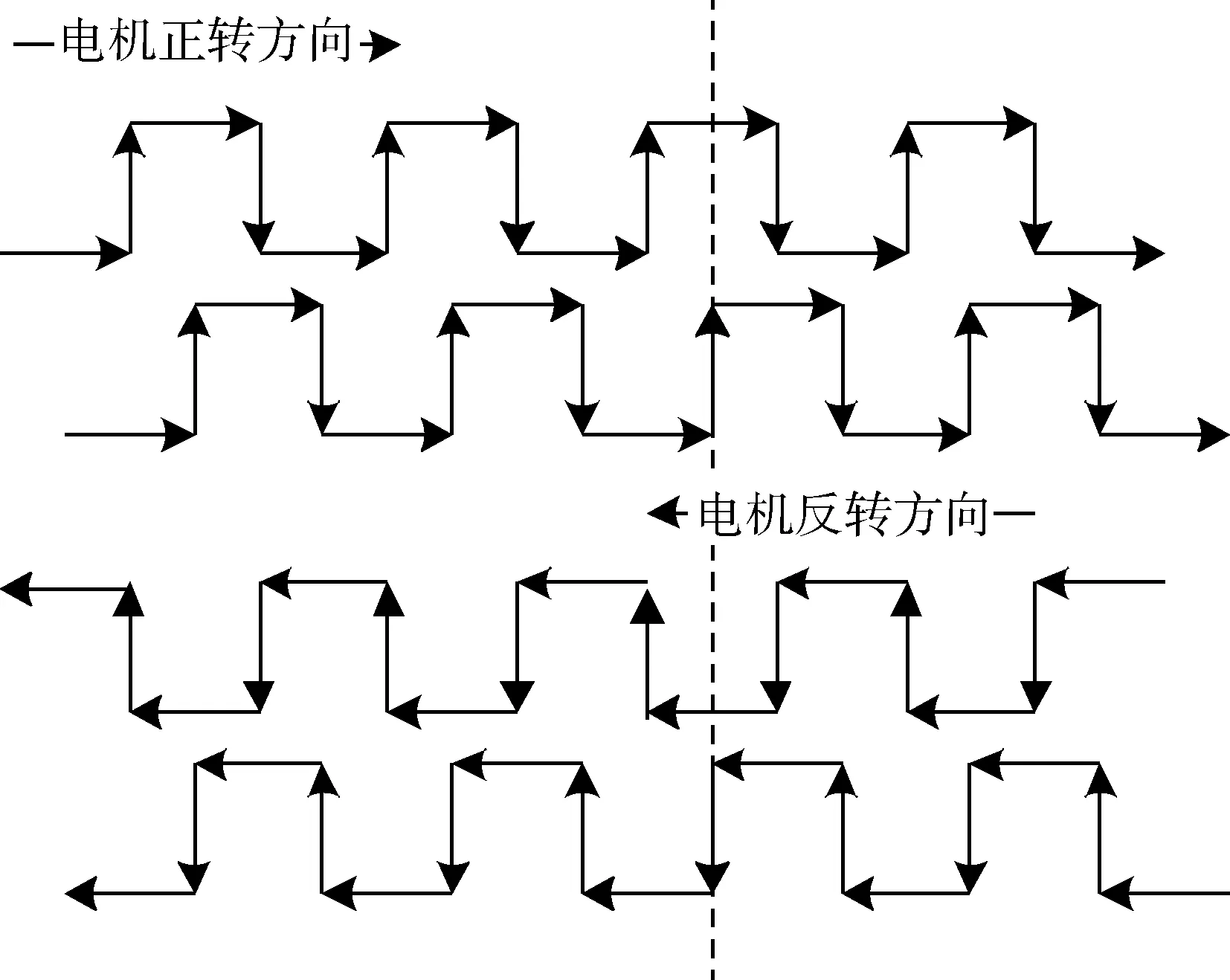
图5 码盘两相转动图
当电机转动时,电机每转动一圈码盘便会产生256个脉冲。在通过软件来提高分辨率时,比如进行四分频,电机每转动一圈将会产生1 024个脉冲信号。这种情况下每个脉冲的角度为360°/1 024=0.035 156 25°。通过差分编码器AM26LS32对码盘的A相和B相的脉冲进行统计,得到最终转动的绝对脉冲计数,以此可以算出电机转动的方向和角度[3]。
2.6 接近开关传感器
在初始化的过程中天线需要走到设定的姿态,即电机走到相应的限位,这些限位就是通过接近开关传感器测得的。电机在转动的过程中,当电机走到相应的限位时,接收传感器的引脚就会由高变低,此时控制电机停止转动,直到天线的初始化完成进入到下一个步骤。接近开关传感器的连接较为简单,如图6所示。
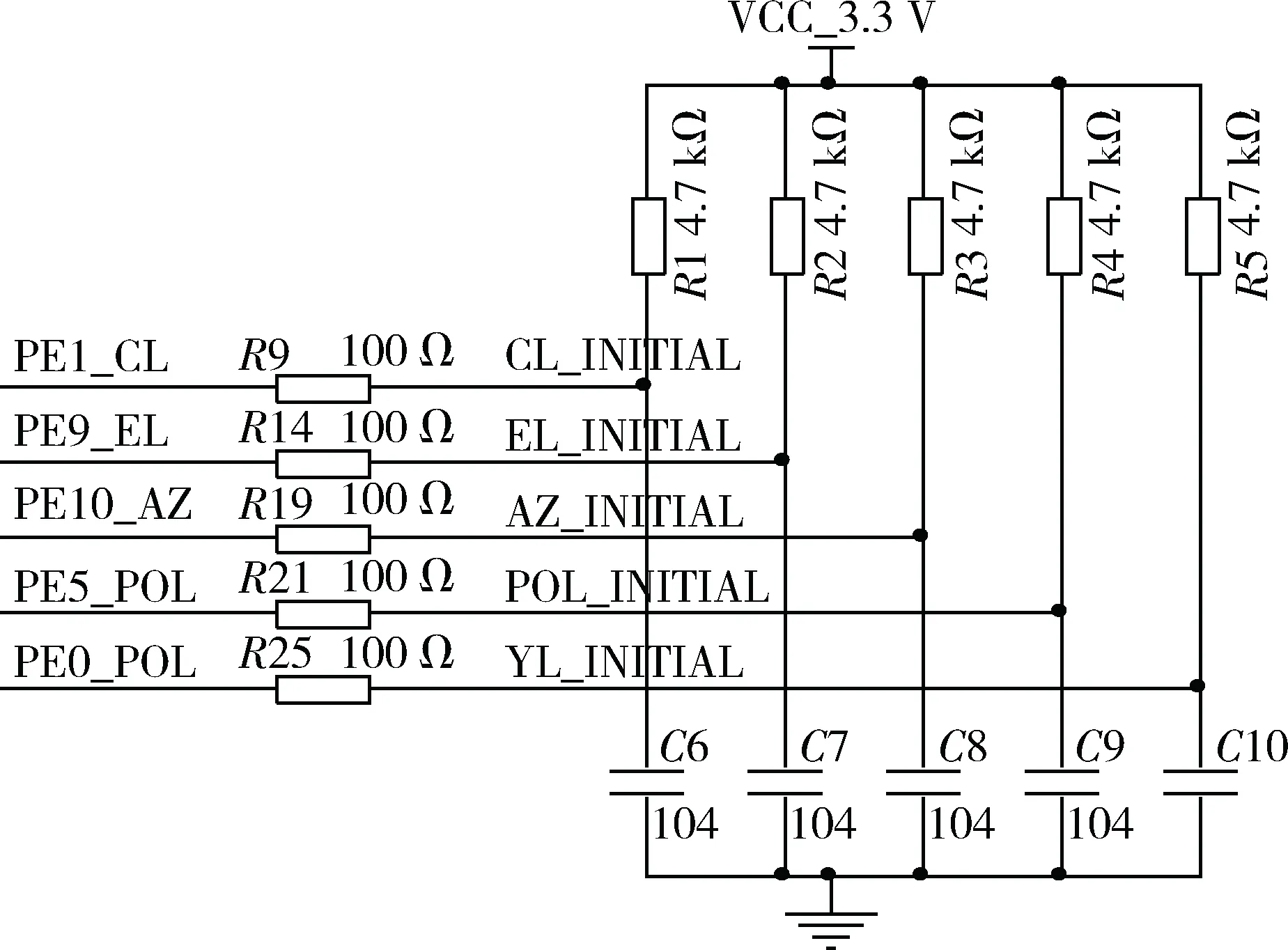
图6 接近开关传感器
2.7 串口通信模块
本控制电路属于船载通信中的下位机部分,它需要通过串口与上位机进行通信,以接收上位机发来的命令以及将天线当前的一些信息发送给上位机进行显示和观察分析[7]。在上下位机的通信中该系统使用的是RS485标准,具体电路的实现如图7所示。

图7 RS485通信
3 结束语
通过编写简单的测试程序对该控制电路进行调试,该控制电路基本可以实现设计的初衷,可以通过编写控制程序实现电路对电机的控制,也能够实现和上位机的通信以及通过其他串口接收其他设备传送过来的信息,如传感器、信标机、GPS等。该控制电路的主要缺陷是没有数据存储模块,可在原有的基础上再添加数据存储模块进行改进。
[1] 李迪阳.船载卫星通信地球站中上位机系统的研究与实现[D]. 南京:南京邮电大学, 2016.
[2] 许磊磊. 一种新型船载卫星通信天线控制器研究与应用[D]. 南京:南京邮电大学, 2011.
[3] 靳丰远. 基于C8051F120的船载卫星通信自动跟踪控制硬件系统的研发与应用[D]. 南京:南京邮电大学, 2016.
[4] 张加娟, 雷电. 车载卫星天线控制系统的研究与设计[J]. 计算机工程与设计, 2007, 28(11):2708-2710.
[5] 万冰. 船载“动中通”通信地球站天线及其跟踪系统研究与设计[D]. 南京:南京邮电大学, 2015.
[6] 刘军. 原子教你玩STM32,寄存器版(第2版)[M]. 北京:北京航空航天大学出版社, 2015.
[7] 成玉柱, 潘玲云, 夏雪婷. 基于ARM和B/S的船载卫星通信跟踪系统[J]. 微型机与应用, 2017, 36(1):25-28.
[8] 唐升, 张展培. 天线姿态监控管理系统中管控主机的设计[J]. 微型机与应用, 2014,33(20):25-28.
[9] 马文斌, 杨延竹, 洪运,等. 步进电机控制系统的设计及应用[J]. 电子技术应用, 2015, 41(11):11-13.
Hardware design of control circuit for servo system of shipborne mobile communiation
Chen Qingchao
(College of Telecommunications and Information Engineering, Nanjing University of Posts and Telecommunications, Nanjing 210003, China)
The shipborne system includes servo subsystem, feed subsystem and monitoring subsystem. The main work of this design is completing the research and design of the hardware control circuit for the servo system of shipborne system. The circuit is based on STM32. This paper introduces the specific design and implementation of control circuit with hardware design as the main line. The work includs hardware selection and circuit design.
shipborne mobile communication; servo system; STM32
TP21;TP30
A
10.19358/j.issn.1674- 7720.2017.20.013
陈庆超.船载“动中通”伺服系统控制电路的硬件设计[J].微型机与应用,2017,36(20):45-47.
2017-03-31)
陈庆超(1991-),男,在读硕士研究生,主要研究方向:计算机网络、卫星通信技术。E-mail:2386765342@qq.com。
