刚体航天器有限时间输出反馈姿态跟踪控制
2017-11-02邵士凯张秀云王丹丹刘文静
宗 群, 邵士凯, 张秀云, 王丹丹, 刘文静
(1.天津大学 电气与自动化工程学院, 天津 300100; 2.北京控制工程研究所, 北京 100190)
刚体航天器有限时间输出反馈姿态跟踪控制
宗 群1, 邵士凯1, 张秀云1, 王丹丹1, 刘文静2
(1.天津大学 电气与自动化工程学院, 天津 300100; 2.北京控制工程研究所, 北京 100190)
为提高航天器系统飞行可靠性,研究角速度信息不可测量的刚体航天器有限时间姿态跟踪控制, 将姿态导数信息作为未知状态,设计基于改进自适应超螺旋滑模的状态观测器,避免未知状态导数上界需要已知的约束,将姿态运动方程进行扩维,在有限时间内实现对未知角速度估计. 同时考虑环境干扰和模型不确定,设计新的有限时间干扰观测器,结合连续自适应方法实现对系统综合不确定上界的估计. 在此基础上,基于终端滑模技术,设计有限时间连续姿态跟踪控制器,较好地减小了控制输入抖振,并采用Lyapunov理论证明了观测器和控制器的有限时间稳定性. 最后仿真结果说明了所提方法的有效性.
滑模控制;姿态跟踪;输出反馈;干扰观测器;状态观测器
航天器高精度姿态稳定与跟踪控制是执行在轨操作的基础, 随着航天器在空间探测、通信、导航等领域的广泛应用,航天器的姿态控制问题吸引了众多国内外学者的关注[1-2]. 考虑航天器飞行过程的外界干扰和系统不确定,滑模控制作为一种鲁棒控制方法,在航天器姿态控制系统中受到广泛关注. 线性滑模首先在航天器姿态控制系统中获得应用,包括单星级航天器姿态跟踪控制和航天器编队姿态协调控制[3-4]. 由于终端滑模具有更高的控制精度和更快的响应特性,在航天器姿态控制获得了更广泛的研究和应用[5-6].
同目前大多数航天器姿态控制研究相同,上述航天器姿态控制系统均采用全状态反馈. 在控制器设计中既利用航天器姿态信息,同时也需要航天器角速度信息. 但在实际工程应用中,由于角速率陀螺损坏或者研制成本约束,导致角速度信息无法获取,只能利用输出反馈技术进行航天器姿态控制器设计. 针对这一问题,文献[7]首先提出的是滤波器算法,利用航天器姿态四元数或MRPs(修改罗德里格斯参数)作为滤波器输入,从而获得对应导数信息并进行反馈控制,此算法在航天器姿态跟踪及编队姿态协调控制中获得了较多应用[8-9]. 除此之外,状态观测器设计也是解决姿态输出反馈的一种重要手段,其中包括全阶状态观测器[10]、降阶状态观测器[11]、扩张状态观测器[12]等,通过状态观测器的设计,也能得到对应的姿态导数信息. 但是,上述滤波器技术和观测器技术都只能实现对姿态导数的渐进估计. 为进一步减小估计时间,提高估计精度,文献[13-14]基于几何齐次性理论设计了有限时间状态观测器,能够实现对MRPs导数的有限时间估计,但观测精度会受到外界扰动及系统不确定影响. 文献[15-16]基于终端滑模设计了有限时间观测器,但需要系统综合不确定和未知状态导数上界已知. 并且上述有限时间观测器都是基于姿态动力学模型的,只能实现对四元数或MRPs导数的估计,无法获取角速度估计值.
当前在滑模姿态控制研究中,一般采用带有符号函数的鲁棒项对系统外界扰动和不确定进行处理,从而使控制输入产生抖振. 为减小控制器抖振,同时对系统综合不确定进行处理,采用自适应控制,并且在航天器姿态跟踪控制中获得较多应用[17]. 但在这些自适应滑模控制器设计中,由于引入了符号函数,使得控制输入是不连续的,不可避免会产生抖振. 干扰观测器技术是进行航天器鲁棒姿态控制的另一种手段,能够观测出系统综合不确定信息,同时抑制抖振. 文献[18]设计了扩张状态观测器来进行航天器姿态系统综合不确定的估计,但只得到了渐进稳定结果. 文献[19]设计了一种终端滑模干扰观测器,能够实现对系统不确定的有限时间精确估计. 高阶滑模干扰观测器[20]也可用来进行系统不确定的有限时间估计,但这些有限时间干扰观测器均需要系统综合不确定导数或Lipschitz常数已知. 本文研究了角速度不可测的航天器有限时间姿态跟踪控制. 首先,设计了无需模型的改进自适应超螺旋滑模状态观测器,在有限时间内实现对四元数导数的估计,进而结合扩维姿态运动学方程得到角速度信息;然后,提出了一种新的有限时间自适应干扰观测器,并进行了有限时间姿态跟踪控制器设计. 设计的两种观测器无需未知状态导数和综合不确定导数上界已知,同时控制器能较好实现抖振抑制.
1 刚体航天器非线性姿态模型
航天器在空间进行姿态控制过程中,有多个坐标系需要明确. 定义FB为本体固连坐标系,FI为惯性坐标系,FD为期望姿态坐标系,采用单位四元数描述航天器姿态,则刚体航天器运动学与动力学方程[4]为
(1)
(2)


(3)
其中R为由FD到FB的旋转矩阵,并满足
(4)
从而得到姿态跟踪误差动力学[4]为
(5)
(6)
2 有限时间角速度估计
为实现对不可测的角速度进行有限时间估计,首先设计改进自适应超螺旋滑模状态观测器,在有限时间内实现对四元数导数的估计,而后对姿态运动学方程进行扩维,并计算出对应的角速度值.
引理1[21]考虑如下非线性系统
(7)
其中‖Δ‖≤δ,存在任意正常数k1,k2,ε,满足
(8)


基于上述引理和假设,设计的改进自适应超螺旋滑模状态观测器为
(9)
φ>0为设计的边界层,自适应增益为
(10)
由(9)可得状态观测器误差方程为
(11)


注2所设计的滑模观测器(9)相比于滤波器算法[7-9]和渐进状态观测器[10-12],能够实现对未知状态的有限时间估计;相比于基于几何齐次性和终端滑模的观测器[13-16],式(9)不依赖于姿态动力学模型,同时也无需系统不确定和未知状态导数上界已知.
(12)
由于A∈R4×3不是方阵,故不能对上式进行矩阵逆操作,无法直接求出角速度信息. 为了实现对角速度的求解,将上式矩阵进行扩维,得到如下矩阵
(13)

(14)
从而,角速度估计值计算式为
(15)
(16)

(17)


3 干扰观测器与控制器设计
为实现有限时间控制,采用终端滑模进行控制器设计,设计非奇异终端滑模面为

(18)

(19)

结合式(17),得到系统方程为


(20)
其中
系统的标称部分可表示为

(21)
系统的综合不确定部分可表示为
(22)

(23)
即综合不确定为
(24)
故姿态跟踪系统可整理为
(25)
(26)
(27)
其中ed=zd-J0s,自适应增益为
(28)
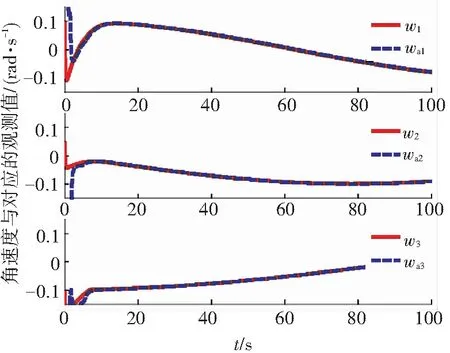
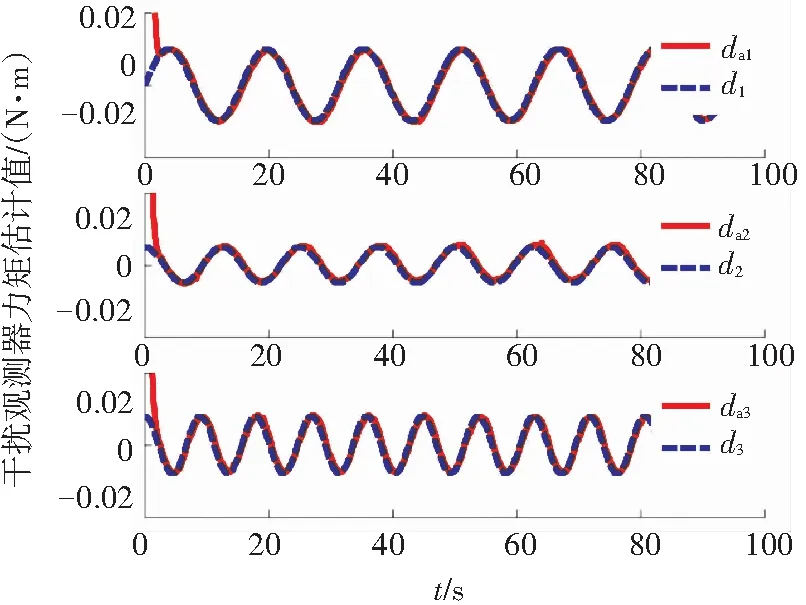
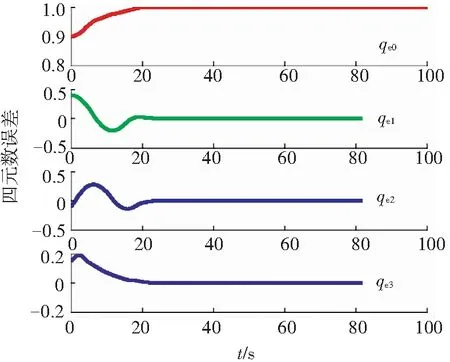
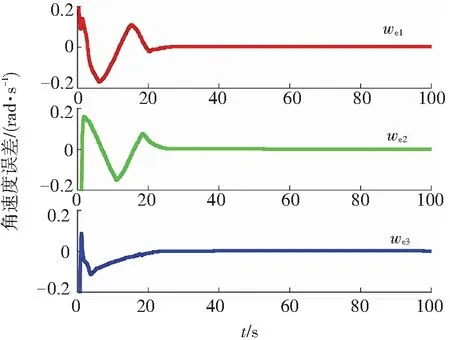
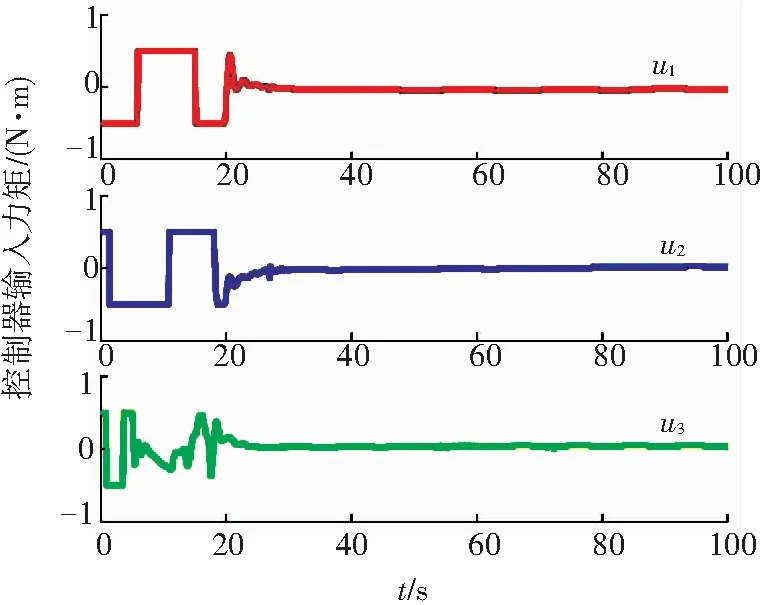
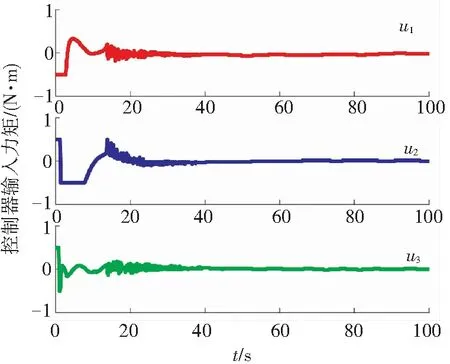
参数σ1>0,σ2>0,kd1>0,kd2>0,εd>0,指数0 证明选取Lyapunov候选函数为 (29) (30) (31) (32) 其时间导数为 (33) 所以,可得到 (34) 由于干扰观测器(27)只能收敛到干扰真值邻域内,为抵消干扰观测器误差,提高控制精度,设计如下有限时间姿态跟踪控制器 (35) 推论1考虑系统(25)和干扰观测器(27)、(28),设计的控制器(35)在有限时间内保证q和w分别收敛至qd和wd附近邻域内. 证明选取Lyapunov函数为 . (36) (37) 其中第4到第5步可由文献[17]引理3.1推出,对于任意δψ0>0.5,可推导如下 (38) 则式(37)可整理为 (39) (40) (41) (42) 故总有 (43) 则可得 (44) (45) (46) 故计算得出滑模面的有限时间收敛域为 (47) 依据文献[17]定理3可知,q和w在有限时间内分别收敛至qd和wd邻域内. 证毕. 为验证所提方法的有效性,进行仿真验证与分析. 仿真中,各参数选取如下 航天器姿态及角速度初值为 期望姿态与角速度为 w(t)=0.1[cos(t/40) -sin(t/50) -cos(t/60)]T. 干扰观测器参数设计为σ1=2,σ2=0.5,kd1=0.1,kd2=20,εd=0.5,指数rd=0.7,zd(0)=[0 0 0],γ(0)=1. 为更好说明角速度估计算法优越性,将其与滤波器估计算法进行比较,滤波器算法[8]为 (48) 其中a>0为滤波器增益,p为滤波器辅助变量,满足p(0)=aq,采用试凑法仿真中取a=22. 图1所示为基于观测器(9)的角速度估计效果以及与基于滤波器(48)的角速度估计对比,其中标注w为真实角速度,标注wa为对应观测值. 可以看出设计的角速度观测算法能在数秒内实现对真实角速度的较高精度估计,并且估值中没有抖振;由于设定了观测精度阈值,状态观测器增益也不会发生过估计问题;同时设计的角速度估计算法精度相比基于滤波器的角速度估计精度有明显提高,说明了所设计的角速度估计算法的优越性. (a)角速度估计 (b)状态观测器参数α1变化 (c)角速度估计误差对比 图2为自适应干扰观测器对设定外界干扰的估计,标注d为真实干扰,da为对应观测值. 虽然式(27)只能保证干扰观测误差收敛到一定范围内,但在应用中容易看出干扰观测器能很快实现对给定干扰的较高精度估计,并且干扰观测值是连续无抖振. 图3、4为控制过程中,四元数误差和角速度误差的变化曲线,可以看出航天器的姿态误差和角速度误差值在有限时间内收敛到平衡点附近. 图5为对应的控制输入曲线,可以看出控制输入在设计的约束范围内,同时控制输入信号无抖振. 图2 自适应干扰观测器估计曲线 图3 四元数误差变化曲线 图4 角速度误差变化曲线 图5 控制输入变化曲线 为进一步说明所设计观测器和控制器的有效性,将所提方法与纯自适应滑模控制进行对比,设计纯自适应滑模姿态控制器为[17] 图6 自适应滑模控制的角速度观测 图7 自适应滑模控制的控制输入 可以看出,设计的角速度观测器能够实现对角速度的高精度估计,同时对比图5、7,容易得出本文设计的控制器能够较好地减小控制器的抖振,说明了所设计干扰观测器和控制器的优越性. 1)研究了角速度不可测的刚体航天器有限时间姿态跟踪控制. 分别设计了基于超螺旋滑模状态观测器的角速度估计算法和有限时间自适应干扰观测器. 2)设计的角速度估计算法比传统滤波估计算法具有更高的精度,同时干扰观测器结合了连续自适应技术,实现了干扰的连续估计,并减小了控制输入抖振. 3)仿真结果验证了所提算法的有效性,对工程应用有一定参考意义. 但只研究了刚体航天器的姿态跟踪控制,对于挠性航天器以及故障条件下的航天器姿态控制有待进一步研究. [1] SANYAL A, FOSBURY A, CHATURVEDI N, et al. Inertia-free spacecraft attitude tracking with disturbance rejection and almost global stabilization [J]. Journal of Guidance, Control, and Dyna-mics, 2009, 32 (4): 1167-1174. DOI: 10.2514/1.41565. [2] MAYHEW C G, SANFEILICE R G, TEEL A R. Quaternion-based hybrid control for robust global attitude tracking [J]. IEEE Transactions on Automatic Control, 2011, 56 (11): 2555-2566. DOI: 10.1109/TAC.2011.2108490. [3] WU Baolin, WANG Danwei, POH E K. Decentralized robust adaptive control for attitude synchronization under directed communication topology [J]. Journal of Guidance, Control, and Dynamics, 2011, 34(4): 1276-1282. DOI: 10.2514/1.50189. [4] WU Baolin, WANG Danwei, POH E K. Decentralized sliding-mode control for attitude synchronization in spacecraft formation [J]. International Journal of Robust and Nonlinear Control, 2013, 23(11): 1183-1197. DOI:10.1002/rnc.2812. [5] JIN Erdong, SUN Zhaowei. Robust controllers design with finite time convergence for rigid spacecraft attitude tracking control [J]. Aerospace Science and Technology, 2008, 12(4): 324-330. DOI:10.1016/j.ast.2007.08.001. [6] ZONG Qun, SHAO Shikai. Decentralized finite-time attitude synchronization for multiple rigid spacecraft via a novel disturbance observer [J]. ISA Transactions, 2016, 65: 150-163. DOI: 10.1016/j.isatra.2016.08.009. [7] GELAND O, GODHAVN J M. Passivity-based adaptive attitude control of a rigid spacecraft [J]. IEEE Transactions on Automatic Control, 1994, 39 (4): 842-846. DOI: 10.1109/9.286266. [8] WONG H, DE QUEIROZ M S, KAPILA V. Adaptive tracking control using synthesized velocity from attitude measurements [J]. Automatica, 2001, 37: 947-953. DOI: 10.1016/S0005-1098(01)00038-3. [9] XIAO Bing, HU Qinglei, SHI Peng. Attitude stabilization of spacecraft under actuator saturation and partial loss of control effectiveness [J]. IEEE Transactions on Control System Technology, 2013, 21(6): 2251-2263. DOI:10.1109/TCST.2012.2236327. [10]ZOU Anmin. Distributed attitude synchronization and tracking control for multiple rigid bodies [J]. IEEE Transactions on Control System Technology, 2014, 22(2): 478-490. DOI:10.1109/TCST.2013.2255289. [11]ZOU Anmin, KUMAR K D, HOU Zengguang. Attitude coordination control for a group of spacecraft without velocity measurements [J]. IEEE Transactions on Control System Technology, 2012, 20(5): 1160-1174. DOI:10.1109/TCST.2011.2163312. [12]YANG Hongjiu, YOU Xiu, XIA Yuanqing, et al. Adaptive control for attitude synchronization of spacecraft formation via extended state observer [J]. IET Control Theory and Applications, 2014, 8(18): 2171-2185. DOI:10.1049/iet-cta.2013.0988. [13]ZOU Anmin, ANTON H J, KUAMR K D. Distributed finite-time velocity-free attitude coordination control for spacecraft formations [J]. Automatica, 2016, 67: 46-53. DOI: 10.1016/j.automatica.2015.12.029. [14]ZOU Anmin. Finite-time output feedback attitude tracking control for rigid spacecraft [J]. IEEE Transactions on Control System Technology, 2014, 22 (1): 338-345. DOI:10.1109/TCST.2013.2246836. [15]XIAO Bing, HU Qinglei, WANG Danwei. Spacecraft attitude fault tolerant control with terminal sliding-mode observer [J]. Journal of Aerospace Engineering, 2013, 28(1):04014055. DOI: 10.1061/(ASCE)AS.1943-5525.0000331. [16]XIAO Bing, HU Qinglei, ZHANG Youmin, et al. Fault-tolerant tracking control of spacecraft with attitude-only measurement under actuator failures [J]. Journal of Guidance, Control, and Dynamics, 2014, 37 (3): 838-849. DOI: 10.2514/1.61369. [17]ZHU Zheng, XIA Yuanqing, FU Mengyin. Attitude stabilization of rigid spacecraft with finite-time convergence [J]. International Journal of Robust and Nonlinear Control, 2011, 21(6): 686-702. DOI:10.1002/rnc.1624. [18]XIA Yuanqing, ZHU Zheng, FU Mengyin. Attitude tracking of rigid spacecraft with bounded disturbances [J]. IEEE Transactions on Industrial Electronics, 2011, 58(2): 647-659. DOI:10.1109/TIE.2010.2046611. [19]XIAO Bing, HU Qinglei, SINGHOSE W, et al. Reaction wheel fault compensation and disturbance rejection for spacecraft attitude tracking [J]. Journal of Guidance, Control, and Dynamics, 2013, 36(6): 1565-1575. DOI: 10.2514/1.59839. [20]SHTESSEL Y B, SHKOLNIKOV I A, LEVANT A. Smooth second-order sliding modes: Missile guidance application [J]. Automatica, 2007, 43(8): 1470-1476. DOI: 10.1016/j.automatica.2007.01.008. [21]DONG Qi, ZONG Qun, TIAN Bailing, et al. Adaptive-gain multivariable super-twisting sliding mode control for reentry RLV with torque perturbation [J]. International Journal of Robust and Nonlinear Control, 2017, 27(4):620-638. DOI: 10.1002/rnc.3589. Finite-timeoutputfeedbackattitudetrackingcontrolforrigidspacecraft ZONG Qun1, SHAO Shikai1, ZHANG Xiuyun1, WANG Dandan1, LIU Wenjing2 (1. School of Electrical Engineering and Automation, Tianjin University, 300100 Tianjin, China;2. Beijing Institute of Control Engineering, 100190 Beijing, China) To improve the reliability of spacecraft system, this paper researches the finite-time output feedback attitude tracking control for rigid spacecraft without angular velocity measurement. The attitude derivative is firstly viewed as an unknown state, and a modified adaptive super-twisting sliding mode state observer is designed and the requirement for the upper bound of unknown state is avoided. By extending dimensions of attitude kinematics equation, the precise angular velocity was estimated in finite time. Then, considering environmental disturbances and system uncertainties, and combining a continuous adaptive approach for estimating the upper bound of system uncertainties, a novel finite-time disturbance observer was designed. Based on the terminal sliding mode, a continuous finite-time attitude tracking controllers is also designed. The control chattering is greatly reduced and the finite-time stability for the observer and the controller is proved via the Lyapunov theory. Finally, simulation results illustrate the effectiveness of the proposed method. sliding mode control; attitude tracking; output feedback; disturbance observer; state observer 10.11918/j.issn.0367-6234.201612060 TP273 A 0367-6234(2017)09-0136-08 2016-12-12 国家高技术研究发展计划(2013AA122902);国家自然科学基金(61673294) 宗 群(1961—),男,教授,博士生导师;邵士凯(1987—),男,博士生 邵士凯,kdssk@126.com (编辑魏希柱)




















4 仿真分析







5 结 论
