多自由度柔性机械手的控制系统实现
2017-11-01彭细华
王 伟,彭细华
(岳阳职业技术学院机电工程系,湖南岳阳,414000)
多自由度柔性机械手的控制系统实现
王 伟,彭细华
(岳阳职业技术学院机电工程系,湖南岳阳,414000)
本文介绍了一种基于西门子PLC和气动控制设计的多自由度柔性搬运机械手控制系统,实现了柔性自动生产线中两个位置的物料抓取和传送,结构简单、性能可靠、成本低廉,有较强的推广价值。
多自由度;柔性生产;机械手
0 引言
在柔性自动生产线中,各个加工设备、自动输送带设备之间都需要进行物料的传送,在机械代替人工后,早期的二维机械手可以实现简单的二维传送。但现代物料搬运的过程中,出现了物料传送位置和方向不固定的情况,机械手不单进行简单的两点传送,还需要改变物料的方向和位置,二维机械手就限制了其使用范围。这种情况下,采取研发能够完成变换方向进行选择,实现两个位置间物料的抓取和传送的多维的多自由度机械手,将更加适合大范围的推广使用。
1 机械手驱动系统组成和工作原理
该机械手的运动控制采用气动驱动,一方面,能源充足、清洁;另一方面,也可以简化机械手的机械结构,提高机械手的运动速率和工作效率。整个气动控制系统由空气压缩机、气泵、三联件、短程升降气缸、左右伸缩气缸、双向旋转气缸、气爪、电磁阀、接近开关、行程开关和红外开关等组成。机械手由气泵提供动力源,三联件用于分离水分、过滤杂质、保持气源干净,上下位置的移动由上下短程升降气缸控制,左右位置的移动由左右伸缩气缸实现,底座的旋转由双向旋转气缸完成。电磁阀控制气缸往复运动,红外开关用于检测物料有无,定位和行程开关用于精确确定机械手各部分的工作位置。
2 机械手控制过程要求
(1)按下启动键,机械手进行初始位置和初始状态检测;
(2)初始检测完成,回转气缸转到左工位,机械手升降气缸下降;
(3)升降气缸下降至下限位时,气动气爪开启,从左工位抓住工件;
(4)停留1秒后,升降气缸开始上升;
(5)上升至上限位后,升降气缸停止,回转气缸回转;
(6)回转气缸回转到右限位后,伸缩气缸向右伸开;
(7)右移至右极限位置后(右工位),伸缩气缸停止工作;
(8)升降气缸向下移动至下极限位置,气爪松开工件;
(9)停留1秒后,升降气缸上升至上限位,伸缩气缸回缩;
(10)伸缩气缸回缩至左限位后,回转缸气逆向回转到达左工位,开始下轮动作循环。
3 电气控制系统设计
3.1 PLC的I/O分配及功能说明
PLC主要运用于工业环境下实现计算机和继电器相结合,经过输入采样、用户程序执行和输出刷新3个阶段。经过一些典型的控制案列研究,本控制系统程序控制采用德国西门子S7-200系列的PLC,具有24点输入,16点输出。,进行启动、停止、上升、下降、伸长、回缩、抓紧、放松、左旋、右旋继电器控制系统设计。根据上述机械手动作的要求进行I/O分配。信号和功能如表1所示。
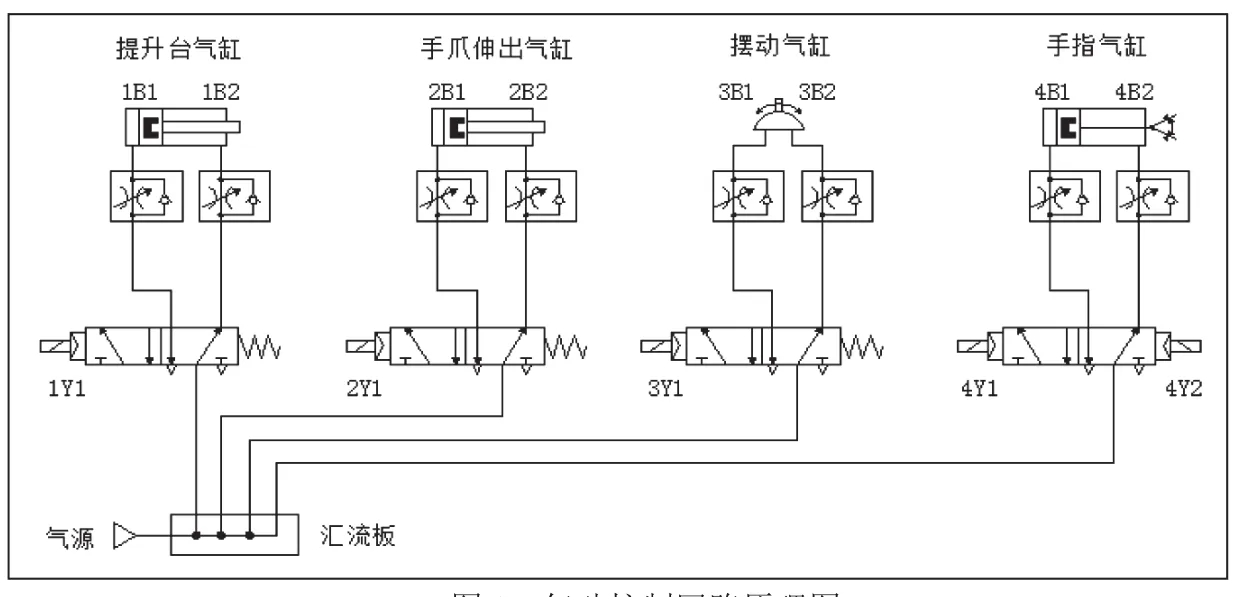
图1 气动控制回路原理图

表1 机械手控制系统I/O分配及功能说明
3.2 PLC控制系统的与触摸屏的连接和通信
触摸屏的选择非常多样,可以直接选用德国西门子原装触摸屏,也可以采用威纶通、台达、、和泉、海泰克、昆仑通态、显控、信捷、步科、永宏等国产知名品牌。本项目采用步科MT5500T型触摸屏,支持2串口同时通讯,可以同步采用不同协议,连接不同厂家的控制器;允许多个触摸屏任意组网,支持以太网通讯功能;可以直接采用USB下载,使用户组态时的下载速度得到大幅提高。PLC与触摸屏的通讯直接通过标准的电缆 RS422或 RS232 进行连接,通信界面制作采用步科EV5000软件,设计较为简单。
4 结语
该柔性机械手控制系统融合了PLC技术为核心、气压驱动和触摸屏控制等,不但能够实现物品的在两点之间的简单搬运,还满足了任意选择传送过程中物料的旋转方向,具有结构简单、操作方便、成本低廉、工作效率高的特点。在现代机械、冶金、化工等工程领域有很大范围的应用。同时融入了触摸屏控制器技术,将会有广阔的应用前景。
[1]袁贵栋,李翠英.柔性自动生产线多功能抓取及传送机械手系统[J].制造技术与机床,2011,(9):70~73.
[2]胡云堂,江卓达.多自由度柔性生产线送料机械手系统设计[J].液压与气动,2011,(6):45~46.
[3]刘明保,吕春红等.机械手的组成机构及技术指标的确定[J].河南高等专科学校学报,2004,(1):1~4.
[4]王新,张庆良.基于PLC控制的气动机械手[J].机械管理开发,2013,(2):111~112.
Realization of control system for flexible manipulator with multi degree of freedom
Wang Wei,Peng Xihua
(Yueyang Vocational Technical College,Yueyang Hunan,414000)
This article introduces a multiple degree of freedom manipulator control system based on Siemens PLC and pneumatic control, and realizes the material grabbing and transmitting of two positions in the flexible automatic production line, with simple structure, reliable performance and low cost, and has strong promotion value
multiple degree of freedom; Flexible Produce; manipulator