基于相位差测距的RFID室内定位系统设计*
2017-11-01蓝威涛张卫强罗健宇蒋金涛
蓝威涛, 张卫强, 罗健宇, 蒋金涛
(宁波大学 信息科学与工程学院,浙江 宁波 315211)
基于相位差测距的RFID室内定位系统设计*
蓝威涛, 张卫强, 罗健宇, 蒋金涛
(宁波大学信息科学与工程学院,浙江宁波315211)
针对当前室内定位的广泛需求及传统室内定位技术的缺陷,设计了一种基于相位差测距的射频识别(RFID)室内定位系统。系统主要由RFID阅读器、电子标签、STM32模块组成,3个电子标签固定在特定位置作为信标节点,1个RFID阅读器作为移动节点发射与接收超高频信号,STM32模块根据测得的相位差计算相应的距离,并利用改进后的三边定位法,确定阅读器的位置。在实验室对进行了设计并测试,结果表明:该系统能很好地完成定位功能,定位精度达到厘米(cm)级,可满足众多领域的应用需求。
相位差测量; 射频识别; 定位; STM32
0 引 言
室内定位[1,2]采用的方法主要有到达角(angle of arrival,AOA)测量、基于信号到达时间 (time of arrival,TOA)、基于信号到达时间差(time difference of arrival,TDOA)、基于接收信号强度指示(received signal strength indication,RSSI)、TDOA/AOA混合定位等。AOA算法通过测量多个信号的传播方向计算距离,算法复杂度较高。TOA定位系统通过测量信号的传播时间来求取距离,要求系统有非常精确的时钟信号。TDOA定位系统通过同一信号到达不同信标节点的时间差定位,需要精确的计数功能。RSSI定位系统的实现分为2个阶段:离线训练阶段(offline stage)和在线定位阶段(online stage),由于非视距、反射、多径等因素的影响,定位精度不高[3]。
国内外在室内定位方面作了大量研究工作,中国香港的Tong F等人[4]将超声波精确定位系统应用于导航车,进行导航研究。AT&T剑桥实验室研制了基于红外线定位方案的Active Badge系统[5],由于系统存在死角,定位精度较低。2013年,日本的Nakagawa Y等人利用一台高速鱼眼相机作为信号的接收器,组建定位系统,最大水平误差在10cm以内,但成本昂贵[6]。由于射频识别 (radio frequency identification,RFID)技术,具有非接触、非视距、成本低、技术成熟等优势,现已成为室内定位技术研究的热点[7]。
1 RFID系统组成
RFID定位系统主要由3个部分组成:阅读器、射频标签、和STM32模块。阅读器由逻辑控制单元、射频接口模块和天线3个部分组成,可以与标签或STM32模块进行通信。RFID标签由芯片和天线组成,芯片作为信息数据的载体,存储了与标签相关的信息,包括用于身份识别的工程采购和建设(engineering procurement and construction,EPC)码。标签通过电磁反向散射耦合的方式向阅读器反射信号,实现通信。标签根据供电情况的不同分为三类[8]:无源、半无源、有源。本文选用无源标签,以电磁耦合方式供电,内部电路可以等效为谐振电路,如图1所示。

图1 无源标签内部等效电路
标签内部电路会产生相位延迟

(1)
式中ω=2πf,为信号的角频率,电路内部相位的延迟量与R,C,L,ω的值有关,设R=100Ω ,C=30pF,L=1nH,信号频率f从860MHz开始,步长为5MHz,递增至960MHz,其产生的相移量与频率的关系如图2所示,可知标签内部相移量与信号的频率成非线性变化。为了克服由标签内部电路引起的相位偏移,系统在使用前需要进行校正。先将阅读器与标签放在一起,间距d=0,然后从阅读器中,读取出此时的相位差,该相位差由电路内部因素引起的,可将其在编程计算时减去,实现校正。

图2 标签内部相位差与信号频率的关系
系统工作频率决定了系统的定位范围、天线形状、成本等,可分为低频、高频、超高频、微波4类[9]。综合考虑,选用超高频段工作频率范围为200MHz~2GHz,典型波长约33cm,工作距离约10m,典型工作频率为433,868~950MHz。系统采用双向信号传输,即阅读器发出信号,标签接收信号后,返回相应信号[10]。
2 基于相位差的定位方法
2.1 差频测相原理
影响系统定位精度的关键因素是测量信号相位值的准确性,由于调制信号的频率太高,如果直接对调制信号进行相位的测量,将造成后续检相电路的设计变得复杂,且测得的相位精度较低。因此,在发射信号与接收信号进行检相之前,要对这两个信号进行降频处理[11]。降频处理过程如图3所示,电路中有2个信号源,分别用于提供2个频率相近的调制信号S1和本振信号S3。S1作为发射信号经标签反射后,接收器收到的信号为S2。分别将发射信号S1与S3进行混频,接收信号S2与S3进行混频,以降低发射信号与接收信号的频率。

图3 差频处理过程
假设发射信号S1为
S1=A1sin(ω1t+φ1+β1)
(2)
式中A1为幅值;ω1为角频率;φ1为初始相位;β1为一个固定数值的相位偏移量,偏移量大小取决于信号源到射频端口的电气长度。发射信号经电子标签反射后,接收器收到的信号S2为
S2=A2sin(ω1t+φ1+β1+ΔΦ)
(3)
式中A2为接收信号的幅值;ΔΦ为相位变化量。
假设本振信号S3为
S3=A3sin(ω2t+φ2+β2)
(4)
式中A3为幅值;ω2为角频率;φ2为初始相位;β2为相位偏移量。
混频器的功能与乘法器相似,信号S1与S3混频后,得到信号S13为
S13=S1S3=A1A3sin(ω1t+φ1+β1)sin(ω2t+φ2+β2)
(5)
根据三角函数积化和差的公式可得

cos[(ω1+ω2)t+φ1+φ2+β1+β2]}
(6)
可知:混频后的信号由差频信号与和频信号两部分组成,通过低通滤波器,滤掉和频信号后,得到参考信号Sr为
(7)
由于信号S1,S3的频率相近,且在同一个电路中,可以认为β1,β2相等,所以Sr可以化简为
(8)
同理,接收信号S2与S3混频、滤波后,可得测距信号Sd的表达式为
(9)
由式(8)、式(9)可知,混频前,发射信号与接收信号的相位差为ΔΦ,角频率ω1与ω2相接近,混频后可以使信号的频率降低为4kHz左右,这时可以比较容易测出精确的相位差ΔΦ,而且两信号相位差与混频前信号的相位差相同。
2.2 检相电路设计
对于相位差测距的定位系统而言,提高相位差检测精度,是提高系统定位精度的关键因素。如图4所示,首先将两路同频率的信号传输至过零迟滞比较器中,从而得到两路占空比为50%的方波信号,然后将一路方波信号的正半周期部分与另一路方波信号作异或处理,得到一路相位差脉冲信号,再将脉冲宽度与周期相除得到占空比,最后将占空比与2π相乘得到的结果即为两路信号的相位差。

图4 相位差测量仿真结果
经降频处理过的信号,通过STM32的计数器在脉冲宽度内进行计数,再经运算处理,可得相位差为

(10)
式中n1为对相位差脉冲的计数值;n2为对整个周期的计数值。
2.3 相位差测距原理
相位差测距的一般过程如图5所示[12],首先STM32发送指令,使阅读器开始工作,发出调制信号S1给标签,再由标签反射回调制信号S2给接收器,经过处理得到相位差,最后传送至STM32模块进行计算,求出距离。
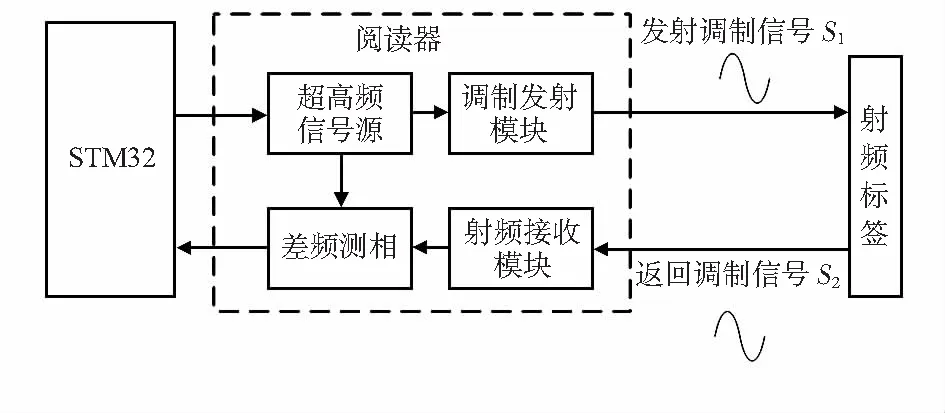
图5 相位差测距原理
如图6所示,阅读器在t1时刻发送频率为f,初始相位为θ1的调制信号,再经标签反射回给阅读器,在t2时刻到达阅读器接收端口后的相位变为θ2[13]。假设阅读器与标签距离为d,调制波往返于阅读器和标签,所经过的路程为2d,花费的时间为t2-t1。电磁波在空气中的传播速度为c=3.0×108m/s,阅读器与标签的距离可以表示为
(11)

图6 信号传播过程
在整个传播过程中相位差变化了ΔΦ可以表示为
ΔΦ=(θ2-θ1)=2nπ+Δφ=2πf(t2-t1)
(12)
式中 Δφ<2π;n的值无法测得。将式(11)与式(12)合并,可得
d=cΔΦ/4πf=c(2nπ+Δφ)/4πf
(13)
由式(13)可知,相位差测距利用简单的线性关系来求解距离,但由于n无法测得,需要通过下述方法,避免运算过程中使用变量n。
使阅读器依次发射2个频率分别为fa=900MHz和fb=905MHz的调制信号Sa,Sb,通过标签反向散射回阅读器接收端,求得两个信号的相位差ΔΦa,ΔΦb为
ΔΦa=(4πfad)/c
(14)
ΔΦb=(4πfbd)/c
(15)
再将式(15)、式(14)相减,得到第二次的相位差为
ΔΦb-a=ΔΦb-ΔΦa=4πd(fb-fa)/c
(16)
经变化可得
d=cΔΦb-a/(4π(fb-fa))
(17)
为了减小系统的测距误差,发射几组频率为fi,i=1,2,3,…,N的信号,求得对应相位ΔΦi,i=1,2,3,…,N,利用最小二乘法拟合,求出ΔΦb-a/(fb-fa)的最优值。设fb-fa=5MHz,ΔΦb-a=2π,根据式(17),可求出d=30m,满足测距范围在30m以内的需求。由于无源标签的识别距离在10m以内,超过10m不能感应,因此,不用考虑相位差大于一个周期的情况。
2.4 系统定位原理
通过相位差测距法,依次测出阅读器与3个不共线标签之间的距离,然后在STM32中编写改进后的三边定位算法,由于存在误差,3个圆不能交于一点,只是两两相交,改进后的三边定位方法分别取两圆的交点中心处,共3个点,以这三个点作三角形,取其质心作为最终的定位结果。系统工作流程如图7所示。

图7 定位系统工作流程
3 系统设计与结果分析
根据图3差频处理过程与图5相位差测距原理,通过Matlab中的Simulink对该定位系统的测距精度进行仿真,考虑到实际环境有多种因素干扰,在仿真过程中加入了随机白噪声。阅读器发射信号频率依次为900,905MHz时,在0~1000cm的范围内选定13个点作为待测点,得到相位差,如表1所示。

表1 测相误差
由表1可知,绝对误差的值有正、有负,根据此相位差,可以将其转换成距离误差。如图8所示,有些点的误差比较大,在实际环境中,可能是受外界电磁波、障碍物等因素的干扰。

图8 测距误差
通过相位差测得距离,然后根据改进后的三边定位法编写相应的代码,求出阅读器的具体位置。实验选定13个待定位点,求得位置信息系统的定位误差大多在 10 cm以内,基本可满足室内定位的精度要求,定位结果如图9所示。

图9 定位结果
4 结束语
研究并设计了基于相位差测距的RFID室内定位系统,平均误差在5 cm左右,可以满足绝大多数室内定位的精度需求。为了能将该定位系统运用到室内结构复杂,人员密集且走动频繁,电磁干扰严重的环境中,需要阅读器依次发射几个频率相差不大的信号,测得几组信号的相位差,将相位差跳变严重的信号组剔除,并利用最小二乘法,以减少测距的误差。另外,通过增加标签的数量,使阅读器能识别出至少4个标签,求出其中任意3个标签产生的定位结果,共4种组合,然后根据信号的波动大小利用加权算法求出结果。
[1] 莫宏伟,董会云.基于光电传感器的移动机器人室内定位[J].自动化技术与应用,2014,33(10):33-36.
[2] 诸燕平,黄大庆,李 勃.基于AOA的无线传感器网络节点定位算法[J].传感器与微系统,2010,29(1):98-101,104.
[3] 丁恩杰,乔 欣,常 飞,等.基于RSSI的WSNs加权质心定位算法的改进[J].传感器与微系统,2013,32(7):53-56.
[4] 李 晶,王仪明.基于单片机的超声波简易定位系统的设计[J].机电一体化,2011(9):66-68,81.
[5] 胡荣春.无线传感器网络中的节点定位方法研究[D].合肥:中国科学技术大学,2007.
[6] Nakagawa Y,Makino H,Nishimori K,et al.Indoor positioning using a high-speed fish-eye lens-equipped camera in visible light communication[C]∥International Conference on Indoor Positioning and Indoor Navigation (IPIN),Montbeliard-Belfort,2013:1-8.
[7] 王小辉,汪云甲,张 伟.基于RFID的室内定位技术评述[J].传感器与微系统,2009,28(2):1-3,7.
[8] Svanda M,Hudec P,Zvanovec S.UHF RF identification of people in indoor and open areas [J].Microwave Theory and Techniques,2009,57(5):1341-1347.
[9] 周晓光.射频识别(RFID)系统设计仿真与应用[M].北京:人民邮电出版社,2008.
[10] 徐 斌.低频射频识别技术研究[D].西安:西安电子科技大学,2013.
[11] 孟锦润.基于双频载波相位差测距的RFID标签定位研究[D].北京:北京工业大学,2014.
[12] 王秀芳,王 江,杨向东,等.相位激光测距技术研究概述[J].激光杂志,2006,27(2):4-6.
[13] 甄 岩,李祥珍.RFID技术的研究与应用[J].数字通信,2011,38(1):32-35.
DesignofRFIDindoorpositioningsystembasedonphasedifferenceranging*
LAN Wei-tao, ZHANG Wei-qiang, LUO Jian-yu, JIANG Jin-tao
(FacultyofElectricalEngineeringandComputerScience,NingboUniversity,Ningbo315211,China)
In order to overcome shortcomings of traditional indoor positioning technology and meet a large number of the current indoor positioning needs,design a kind of radio frequency identification (RFID) indoor positioning system based on phase difference ranging,which is mainly composed of a RFID reader,electronic tags and a microprocessor module.3electronic tags are fixed at particular positions as beacon nodes,and a RFID reader can transmit and receive ultra high frequency signals as mobile node.The STM32calculates the corresponding distance between two points according to the phase difference,and ultimately determines the location information of the reader through the improved trilateration localization algorithm.The system is designed and test in laboratory,the results show that the system can perfectly achieve the positioning function,and positioning precision reaches cm level,that can meet the application needs of many fields.
phase difference measurement; radio frequency identification(RFID); positioning; STM32
10.13873/J.1000—9787(2017)10—0085—04
2017—01—02
浙江省教育厅科研资助项目(Y201121170)
TN 96
A
1000—9787(2017)10—0085—04
蓝威涛(1992-),男,畲族,硕士研究生,研究方向为嵌入式系统设计与应用,E-mail:1569127971@qq.com。张卫强(1963-),男,通讯作者,硕士生导师,副教授,从事嵌入式系统设计与应用研究工作,E-mail:zhangweiqiang@nbu.edu.cn。