基于EEMD的车辆微动信号提取及分类*
2017-11-01陈华杰林封笑
林 萍, 陈华杰, 林封笑
(杭州电子科技大学 通信信息传输与融合技术国防重点学科实验室,浙江 杭州 310018)
基于EEMD的车辆微动信号提取及分类*
林 萍, 陈华杰, 林封笑
(杭州电子科技大学通信信息传输与融合技术国防重点学科实验室,浙江杭州310018)
针对轮式和履带式车辆微动信号的差异对目标车辆进行了识别分类,利用集合经验模式分解(EEMD)将原始信号分解为多个本征模函数(IMF),通过相关性分析,验证了EEMD能够有效克服EMD所带来的模态混叠问题。在此基础上,提取了4种特征,采用最近邻方法进行分类。实验结果表明:经EEMD所提取的特征是有效的,对目标速度,以及方位角的变化具有相当的稳健性。
集合经验模态分解; 微多普勒; 目标分类; 信号分离
0 引 言
目标微动具有唯一性和稳定性的特点,由于目标微动会对雷达回波产生调制,通过对调制后的回波频率进行分析,发现,不同的目标之间存在明显差异,因此,美国海军实验室将微多普勒现象引入雷达领域,为雷达目标识别提供了新的研究思路[1,2]。
在实际应用中,轮式车辆和履带式车辆的微动信号往往与车身信号混合甚至夹杂着杂波,因此,必须将两类车辆的微动信号从原始信号中分离出来[3]。由文献[4]可知车辆目标的多普勒谱分布范围为[0,2fd],车身部分的分量主要集中于[0,fd],微动分量分布在整个频谱中。通过文献[5]仿真返回的回波发现存在非线性且不稳定的微动信号,传统的信号分离方法已经不能满足要求。文献[4]提出了基于经验模态分解(empirical mode decomposition,EMD)的车辆目标分类技术,并通过仿真实验进行了验证。本文在文献[4]的基础上,增加了杂波,设定了更广的车速范围和方位角范围,此时,在回波中可能会存在间断信号或者噪声等,造成极值点分布不均匀,在这种仿真环境下利用文献[4]方法会存在模态混叠的问题,导致两类车辆特征差异无法凸显[6~10]。
本文针对模态混叠问题,提出了集合EMD(ensemble EMD,EEMD)对车辆的原始回波进行分解。进一步通过相关性算法,验证了EEMD的有效性。在此基础上,基于两类车辆微动信号的差异提出了4种特征。实验结果表明:本文方法具有更好的分类效果,且具有稳健性。
1 轮式履带式车辆仿真建模
文献[5]通过建立三维点目标运动模型模拟车辆目标运动产生回波数据。分别对轮式车辆的车轮转动和车身平动这2个强散射点运动建模和履带式车辆的上半部分履带平动以及左、右两侧履带转动这2个强散射点建模。本文根据上述方法建立了仿真模型,在此基础上添加了动杂波,并对各个方位角以及不同的速度进行了仿真。
2 基于EEMD的微多普勒信号抽取
合成孔径雷达(synthetic aperture radar,SAR)微多普勒信号是从SAR方位向回波信号中提取的,因此,首先需要对SAR/地面目标指示器(GMTI)原始回波数据进行距离向压缩和距离徙动校正[5],然后,对所得的信号进行动态主元分析(dynamic principal component analysis,DPCA)处理,从而抑制静杂波;最后进行EEMD提取微动信号。流程如图1。
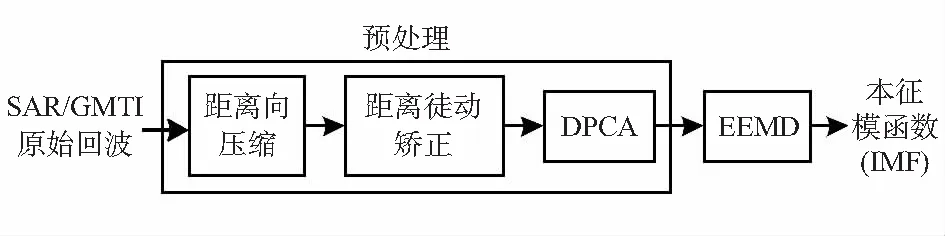
图1 微多普勒信号提取流程
2.1 EEMD算法
EEMD使高斯白噪声均匀分布在各个频段,波形更加平滑,此时,杂波也被包含在噪声中,经过多次迭代克服了EMD由于极值点分布不均匀造成的模态混叠问题。对所得到的回波信号进行EEMD步骤如下:
1)向回波信号添加一组均匀的高斯白噪声,产生新的信号;
2)对新信号进行EMD,得到若干个本征模函数(intrinsic mode function,IMF)和一个余项为
(1)
式中X(t)为步骤(1)中的新信号;xj为对应的第j个本征模函数;rn为分解到最后剩下的余项。
3)继续给回波信号添加均匀白噪声,重复步骤(1)和步骤(2),重复次数与预定义的迭代次数有关,一般多于100次。最后,得到多个步骤(2)的结果为
(2)
式中Xi(t)为第i次迭代时步骤(1)产生的新信号;xij为第i次迭代时经EMD产生的第j个IMF;rin为第i次迭代时经EMD产生的余项。
4)对步骤(3)所得到的各个IMF和余项取均值得到最终的IMF和余项,具体表示如下
xj=xij/N
(3)
rn=rin/N
(4)
式中N为迭代次数。
5)对各个IMF进行Hibert变换得到时频图。
2.2 实验结果分析
对轮式车辆回波和履带式车辆回波分别进行了EMD和EEMD,结果如图2、图3所示。EMD的IMF1频率分布范围广,产生了模态混叠的现象。
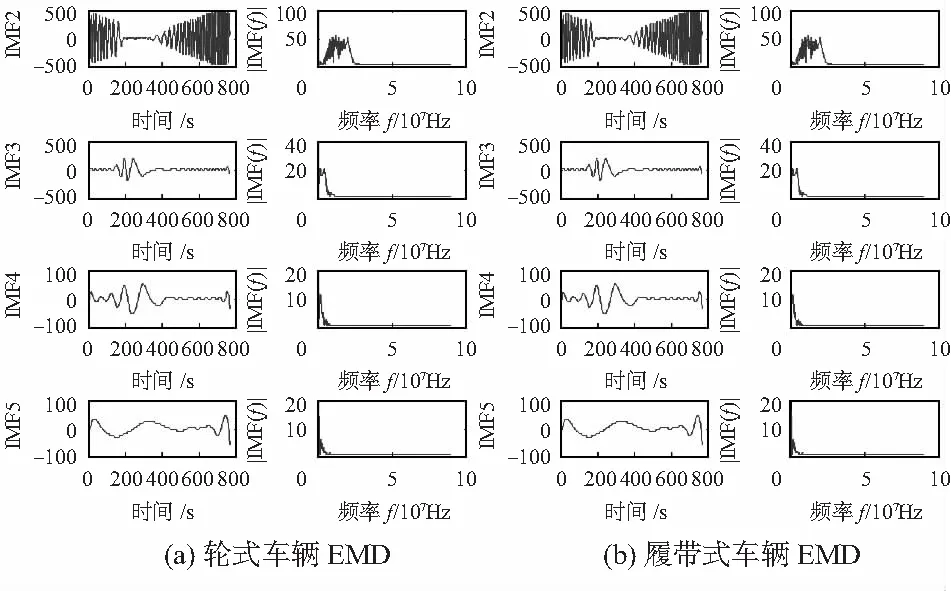
图2 EMD结果

图3 EEMD结果
3 基于EEMD的轮式和履带式车辆分类算法
3.1 算法原理
主要通过2种算法实现了对车辆目标的分类:EEMD算法以及基于微动信号的差异性所做的特征提取算法,流程如图4。

图4 车辆算法流程
3.1.1基于相关性分析的有效IMF选择
提出了相关性分析方法描述EMD与EEMD之间的具体差异。相关系数计算如下

(5)

利用EEMD对轮式车辆和履带式车辆进行信号分解,对分解后的各个IMF与其车身信号以及微动信号做相关性分析,得出了如下实验结论:
1)有效的IMF选择:实验中选择0.1作为门限值,因此,本文仅选择前5个IMF进行实验分析。
2)基于EEMD微多普勒信号分离的效果分析:从表1可以看出,EEMD能克服模态混叠问题,使得微多普勒信号能够更有效地分离。
3)轮式车辆与履带式车辆分解后的IMF之间比较:由表1可知:轮式车辆的车身主体部分信号主要集中在前2个IMF,微动信号几乎可以忽略。履带式车辆微动信号较为均匀地分布在前4个IMF中,其中IMF2与IMF3也存在车身分量,而IMF1主要为微动信号。

表1 两类车辆EEMD相关系分析
3.1.2 基于微动的特征提取
针对上述所分析的这两类车辆微多普勒信号的差异,提取了4种新特征作为这两类车辆的分类依据,具体如下
特征1:第1个IMF高频段能量
(6)
式中x1为第1个IMF;f为频率;fd为目标多普勒频率。
特征2:第1个IMF高频段波动程度。将x1分为m份,使用u表示每个等份中的个数,则第1个IMF高频段波动程度

(7)
式中t=1,2,3,…,m;总的波动程度为F=sum(F′)。
特征1和特征2描述了两类车辆在第1个IMF上的差异。根据前面的相关性分析可知轮式车辆的IMF1主要为车身主体部分,微动信号可以忽略,其频谱分布较窄[0,fd]。而履带式车辆的IMF1主要为微动信号部分,导致其频谱展宽,因此,两类车辆在[fd,2fd]段频谱的能量和波动均存在差异。
特征3:第2个IMF的频谱的极大值点
(8)
式中Y为各个IMF的傅里叶变换的幅值;x2(k)为第2个IMF的第k个元素。
特征3描述了第2个IMF峰值点的大小。根据相关性分析可知,履带式的IMF2部分是车身和微动信号并存的。轮式车辆的IMF2只存在部分车身信号。因此可以得出如下结论:轮式车辆IMF2部分频谱的幅度要小于履带式车辆IMF2频谱的幅度。
特征4:模态能量熵判断IMF之间的离散度
(9)

特征4主要根据各个IMF的能量分布判别。轮式车辆的车身主体部分信号主要集中于前2个IMF,由于其微动信号较少,所以微动信号相对于车身信号含量几乎可以忽略。履带式车辆车身主体信号主要集中于IMF2和IMF3,但是由于履带的反射系数大,在运动过程中产生了一个较大的微多普勒信号,所以它在各个IMF的分布上就更加均匀。
3.2 实验结果
实验主要有两类目标:轮式车辆与履带式车辆。采用仿真数据作为训练样本和测试数据,最后采用最近邻分类器对测试数据进行测试。仿真实验主要参数有:雷达带宽150 MHz,脉冲重复频率750 Hz,雷达载频3 GHz,信号脉冲宽度1.33 μs,目标车辆速度2~20 m/s,方位角0°~40°,两类车辆的回波数据按照文献[5]仿真产生。实验过程中,采用最近邻分类器分类,分别测试了不同特征下,不同速度和不同方位角下的各个特征识别率,结果如表2、表3所示。

表2 不同速度下各个特征的识别率

表3 不同方位角下各个特征的识别率
从表2中可以看出,特征1和特征2在目标车辆低速过程中识别率较低,在高速过程中识别率较高。特征3和特征4刚好相反,在低速过程中,这2个特征对于目标车辆具有较好的区分度。通过以上分析,可以发现本文所提出的4种特征存在互补关系。在含有动杂波下,针对大速度范围以及方位角范围,也可以获得较高的识别率。
4 结 论
针对复杂环境和复杂运动模式下的轮式车辆和履带式车辆提出了EEMD。通过高斯白噪声克服了EMD的模态混叠问题。利用相关性判别方法,进一步验证了EEMD的有效性。在此基础上,针对2类车辆微动特性的差异提出了4种特征,通过最近邻分类器进行分类的结果表明,本文算法在一定方位角和速度下具有良好的识别性能。
[1] Chen V C,Li F,Ho S S,et al.Micro-Doppler effect in radar:Phenomenon,model,and simulation study[J].IEEE Transactions on Aerospace and Electronic System,2006,42(1):2-21.
[2] Kim Y,Ling H.Human activity classification based on micro-Doppler signatures using a support vector machine[J].IEEE Transactions on Geoscience and Remote Sensing,2009,47(5):1328-1337.
[3] 聂 鹏,徐洪垚,刘新宇,等.EEMD方法在刀具磨损状态识别的应用[J].传感器与微系统,2012,31(5):147-149.
[4] 李彦兵.基于微多普勒效应的运动车辆目标分类研究[D].西安:西安电子科技大学,2013.
[5] 骆宇峰.SAR轮式/履带式车辆微多普勒建模和特征分析[D].杭州:杭州电子科技大学,2013.
[6] 吕艳新,李海涛,邓 冬,等.基于EEMD的多传感器信息融合降噪方法[J].传感器与微系统,2014,33(10):5-7.
[7] 董 伟,王红亮,黄洋文.基于多重特征提取的战场车辆声目标识别[J].传感器与微系统,2010,29(7):30-32.
[8] 刘桂林,孔祥维,刘 航.基于无线传感器网络的车辆检测识别算法研究[J].传感器与微系统,2010,29(2):9-12.
[9] 卢 丹,周以齐.基于EEMD和CWT的挖掘机座椅振动分析[J].山东大学学报:工学版,2015(3):58-64.
[10] 蒋留兵,韦洪浪,管西海,等.基于EEMD和HOC的超宽带雷达生命探测算法研究[J].现代雷达,2015,37(5):25-30.
EEMD-basedvehiclemicro-motionechosignalextractionandclassification*
LIN Ping, CHEN Hua-jie, LIN Feng-xiao
(KeyLaboratoryofFundamentalScienceforNationalDefense-CommunicationInformationTransmissionandFusionTechnology,HangzhouDianziUniversity,Hangzhou310018,China)
Aiming at difference of micro-motion echo signal of two kinds of vehicles,target vehicle is identified and classified.Ensemble empirical mode decomposition(EEMD) is employed to decompose original signal into a number of intrinsic mode function(IMF).By means of correlation analysis,it is proved that EEMD can effectively overcome the mode mixing problem caused by EMD.On this basis,four features are extracted,the nearest neighbor method is used for classification.Experimental results show that the features extracted after EEMD are effective and fairly robust against the variation of the target velocity and azimuth angle.
ensemble empirical mode decomposition(EEMD); micro-Doppler; target classification; signal separation
10.13873/J.1000—9787(2017)10—0038—03
2016—09—12
国家“十二五”预研项目
TN 957
A
1000—9787(2017)10—0038—03
林 萍(1992-),女,硕士研究生,主要研究方向为模式识别,信号处理。