模糊PID控制下移动机器人定位方法研究
2017-11-01苗永梅
苗永梅,林 辉
(1.宝鸡职业技术学院 电子信息工程系,陕西 宝鸡 721304; 2.渭南师范学院 网络中心,陕西 渭南 714000)
模糊PID控制下移动机器人定位方法研究
苗永梅1,林 辉2
(1.宝鸡职业技术学院 电子信息工程系,陕西 宝鸡 721304; 2.渭南师范学院 网络中心,陕西 渭南 714000)
机器人定位研究一直是机器人学研究的重点,但目前机器人定位方法都存在缺点,抗干扰能力差,不能做到准确定位,主要是由于环境等多方面因素的干扰,定位误差会逐渐加大;由于上述原因,提出了一种基于设定值加权模糊PID控制的移动机器人自定位方法;给出了定位过程的参数,为机器人移动建立模型,设计一种模糊 PID 控制器,根据误差及变化率大小,选择模糊定位或PID定位,实现移动机器人的智能定位,提高机器人定位准确的准确性;通过仿真实验结果证明:模糊PID控制的机器人自定位方法对移动机器人的定位过程有较好的改善作用,实用效果较好。
模糊PID;移动机器人;定位
0 引言
20世纪60年代以来,随着机器人的产生,把人类从恶劣、危险和繁重的工作环境中解放出来,通过减轻劳动强度,改变生产模式,提高生产率等途径,已经成为人类的新型生产工具,并相继应用到工业生产中,包括喷涂、检测、弧焊、机械加工、点焊、装配种类型,提高了产品生产的一致性和量,具有很大的优势。然而,机器人常常位于某一个固定的位置进行操作,并不能满足人类各个方面的需求。因此,移动机器人应运而生。
移动机器人在人们生活中受到越来越高的重视,其中智能定位研究成为研究移动机器人的重点工作。定位是确定移动机器人所处环境[1],对机器人实现导航、侦测等功能具有重要的指导意义,是移动机器人智能控制的核心功能之一。传统的移动机器人在定位是采取RTFL定位方法,但这种定位方式存在着定位受外界因素影响大,不易控制等问题,所以RTFL定位算法并不十分有效[2]。PID控制器在移动机器人定位控制中广泛应用,其优点就是操作简单容易学会,但它的控制精度低,受环境干扰大,很难做到准确定位。文献[3]提出了主元法对移动机器人进行定位。这种方法就是在机器人身上安装一个传感器,从传感器传回数据中寻找主要标识,并将这些标识在环境地图中进行定位匹配,确定这些主要标识在地图中具体位置,传感器位置即移动机器人位置。但由于这种方法存在数据存储量大,且传回数据与环境地图的匹配工作量大等问题,难以广泛应用。文献[4]提出另一种移动机器人定位方法:网格图定位法。就是将移动机器人的活动区间分割成网格状,并对网格内的每一个单元格被障碍物占据的可能性的大小进行概率值分配。这种方法虽然在创建和维护方面存在优势,但由于它的信息存储量会随着环境的扩大而增大,对计算机提出较大挑战,不利于计算机实时处理[5]。文献[6]提出行位推定位算法,这是移动机器人定位的一种较经典方法。通过基数按移动机器人距起点的距离及其所在方向进行定位,但这种定位会随着距离的增加而加大,不适用于远距离移动机器人定位。长时间移动时还需要通过其它的传感器配合对相关的定位算法进行校正。
模糊控制器是采用计算机控制技术,以模糊数学、模糊语言形式的知识以及模糊逻辑推理为依据的一种自动控制器。它的控制要求是人根据经验制定的。能有效改进PID控制机器人定位不准确的问题,综合上述原因,本文提出了基于模糊PID控制移动机器人定位的方法。针对机器人定位过程中定位误差及变化率,设计一个控制器,来选择使用模糊控制器还是PID控制器,当误差及变化率较大及采用模糊控制器,否则就用PID控制器。仿真实验证明,所提模糊PID控制移动机器人的定位方法能有效减小外界环境对机器人定位产生的影响,从而提高机器人定位的准确度。
1 模糊PID控制下移动机器人定位方法
1.1 移动机器人自定位问题的转换
在对移动机器人进行定位的过程中,可以把定位问题转换为随机统计系统的状态滤波问题或是状态估计问题,将该随机统计定位系统利用公式(1)和公式(2)给出的动态方程和测量方程进行描述:
X(k)=f(X(k-1),u(k))+w(k)
(1)
Z(k)=h(X(k))+v(k)
(2)
式中,X(k)代表移动机器人在k时刻的状态向量,U(k)代表在k时刻的输入向量,w(k)代表该随机统计系统动态噪声,Z(k)代表该系统观测向量,v(k)代表该系统观测噪声向量,f(·)和h(·)分别代表该随机统计系统相应的动态方程和测量方程,结合贝叶斯推理理论[7]对移动机器人在位置空间上的概率分布过程进行描述:
p(l)←ap(s|l)p(l)
(3)

(4)
式中,l,l′代表移动机器人在单位时间内的位置变量,a代表移动机器人在单位时间内的运动信息,s代表移动机器人此阶段的观测信息,p(l)代表其在位置空间上的概率分布,p(s|l)为描述当前位置l和当前观测s的评价向量,p(l|l′,a)代表几率,是机器人在时间内从l′移动至位置l的几率,其中a代表移动数据。
1.2 移动机器人自定位过程的参数计算
假设,N代表移动机器人在某个时段移动过程中扫描到的标签数量,(x1,y1),(x2,y2),…,(xN,yN)代表相应的位置坐标,由于在该时段内移动机器人得到的标签分布不同,结合真实位置的标签授予较大的权重。相反,则授予较小的权值,将高斯函数[8]定义为权重函数,为移动机器人在某个时段移动过程中扫描到的每个粒子授予相应的权值,利用式(5)和(6)进行表示:
(5)
(6)
其中:xmax、ymax分别表示移动机器人扫描区域在X轴、Y轴方向上相应的最大值,利用式(7)描述扫描到的各个标签的归一化权值,移动机器人在该时段相应的位置信息利用式(8)进行表示:
(7)
(8)
式中,r代表扫描半径,假设,移动机器人在初始位置A(x0,y0,θ0),经过Δt时间后,抵达B点位置,结合加权平均法可计算出移动机器人的位置坐标,依据几何关系可知,移动机器人在整个移动过程中对应的旋转角度:
φk=cos-1(1-l2/2R2)
(9)
其中:
(10)
(11)
所以:
θk=θ0+φk
(12)
1.3 模糊PID控制器设计
模糊PID方法是非常常见的高精度控制方法,这种方法利用真实值r(t)与真实的输出y(t)之间的差值:
e(t)=r(t)-y(t)
(13)
模糊PID控制移动机器人定位,就是通过线性组合将移动机器人偏差比例、积分和微分控制所构成的控制量进行控制的一种算法[9-10]。它的控制规律用公式可表示为:
(14)
将上式转换成函数形式为:

(15)
式中,u(t)、e(t)分别代表模糊PID控制器的输出和输入变量,d(t)代表偏差变量,Kp代表模糊PID控制器的比例系数,控制模糊PID控制器的偏差信号,其与变差信号成反比例关系,与输出信号成正比例。Tl代表积分时间系数,随着偏差的增大,控制信号会逐渐增大,当偏差消失,控制器信号也会随之消失,用函数表示为式(16),其目的是提高模糊PID控制系统受外界干扰的能力。TD则代表微分时间系数,它与偏差变化有关用函数公式表示为式(18),用于改善模糊PID控制器的动态特性。

(16)
或转换成:
(17)
(18)
假设,u(k)代表第k次采样时刻的计算机输出值,e(k)代表输入的偏差值,Ki为积分系数,为了提高系统的响应和执行速度[10],增加3个参数ΔKP,ΔKI,ΔKD设定PID控制参数调整量为KP=Kpo+ΔKp,Ki=Kio+ΔKi,Kd=Kdo+ΔKd,其中:
(19)
(20)
(21)
则系统实际控制器输出为:

(22)
2 实验结果与分析
2.1 定位算法
每种定位算法,用到的参数为:对于RTFL定位算法,观测噪声方差(1000,1000),初始位置为(200,-200,0.1),初始方差为(40000,40000,0.01),动态噪声方差(1000,1000,0.001)。对于模糊PID定位算法,初始位置为(200,-200,0.1)处随机采样,栅格的尺寸为30 mm×30 mm×0.026 rad,采样宽度限定为(±300,±300,±0.05),初始位置为(±300,±300,±0.05)内均匀分布。随机采样的高斯函数的根方差σ=(200,200,0.1),粒子数80[11-12]。
2.2 实验分析
为了证明模糊PID对移动机器人定位的有效性,进行了一次测试实验。通过比较规划点坐标、计算点坐标、坐标点误差和距离误差,实验将RTFL定位算法与模糊PID定位误差进行对比[13]。首先计算出通过RTFL定位算法和模糊PID定位的方法分别定位出来的定位坐标点与实际定位坐标(规划坐标点)之间的差距,然后再计算出两者之间的距离差[14-16]。定位结果如表1、2所示。
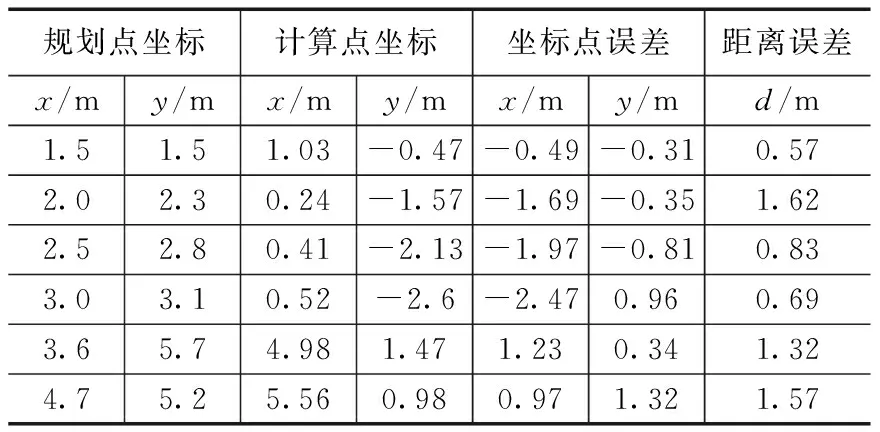
表1 RTFL定位算法实验结果
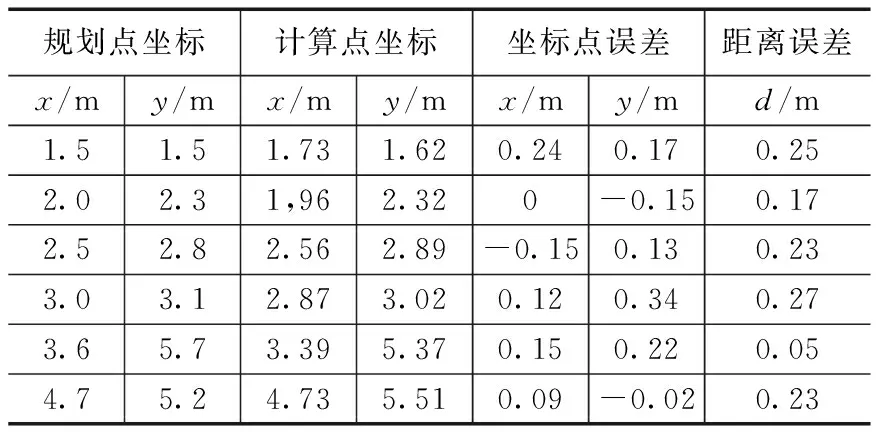
表2 模糊PID定位实验结果
从表1可知,采用RTFL定位算法的定位误差在0.57~1.62 m波动,平均定位误差为1.24 m。从表2可以看出,模糊PID定位误差 0.05~0.25 m 波动,平均定位误差为 0.15 m。
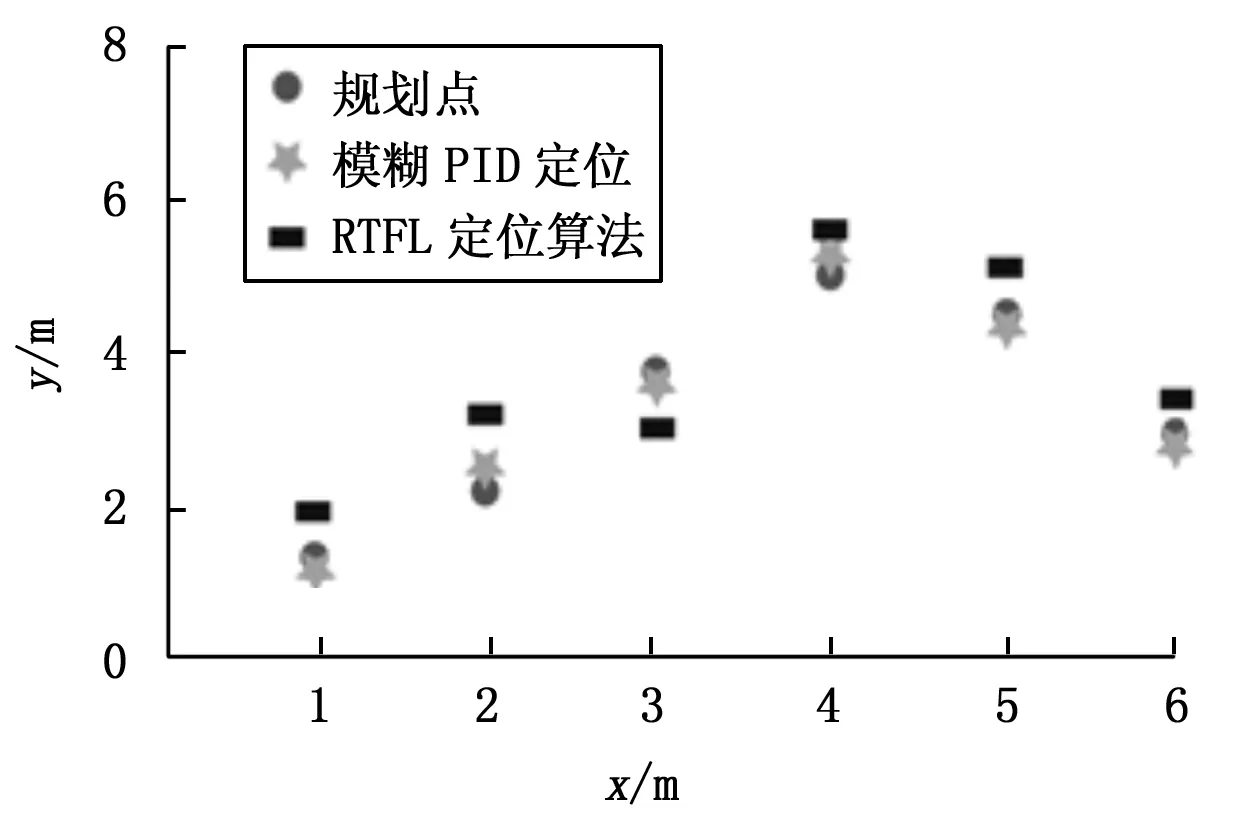
图1 模糊PID定位与RTFL定位的定位点比较
图1比较直观地表现出两种定位算法之间的定位差距。模糊PID定位更接近规划点,所以用模糊PID定位在特定位置的定位精度明显较RTFL定位算法准确。
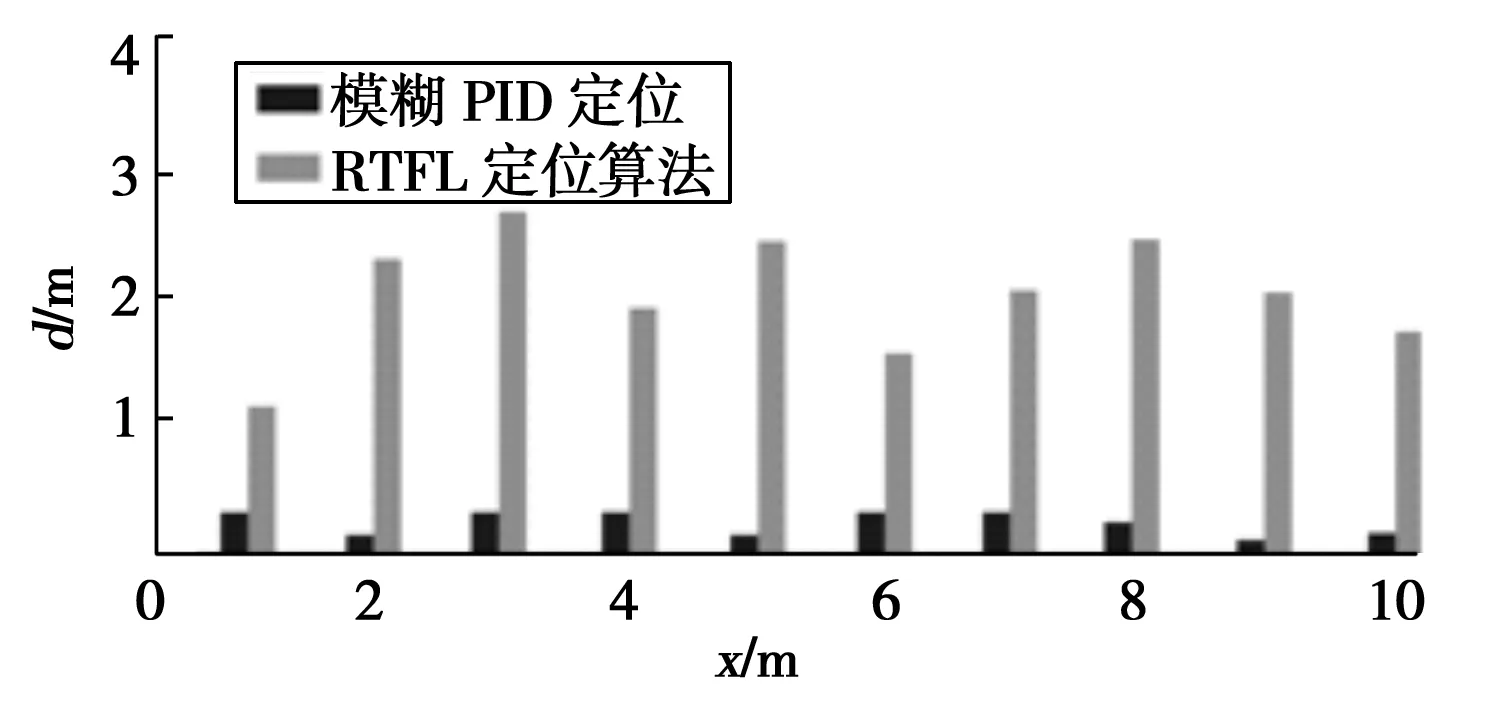
图2 模糊PID定位与RTFL定位误差直方图
由图2定位误差直方图可看出,模糊PID定位误差比较小,整体误差在0.3 m以下,比较平缓,在0~0.3 m波动;相反RTFL定位算法的定位误差比较大,总体定位误差在1.2 m以上,且波动幅度也比较大,在1.2~2.7 m 波动。
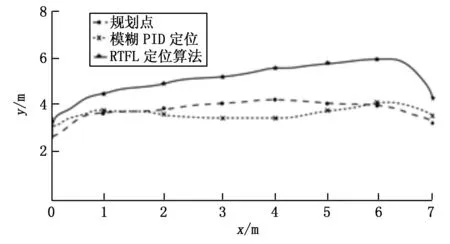
图3 模糊PID定位与RTFL定位的规划路径图
由图3定位规划路径图可看出,在相同条件下,机器人在移动过程中用模糊PID定位得到的路径与规划路径更接近,相较而言,用RTFL定位算法得到的估算路径与规划路径之间则存在较大差异。
在实验中,随机设定了60条路径,每一条路径的实验结果都与上述实例结论相同,模糊PID控制定位较RTFL定位算法定位的更准确,表明模糊PID定位的方法提高了定位的准确度[17-19]。
在实验中,分别利用表格列出RTFL定位算法与模糊PID控制定位的误差,还通过3个图分别说明RTFL定位算法与模糊PID控制定位之间的定位区别,都说明了模糊PID控制定位的定位误差小于RTFL定位算法的定位误差[20-21]。
综上所述,RTFL定位算法的定位误差为1.24 m,通过模糊PID的定位方法的定位误差为0.15 m,较RTFL定位方法大大的提高了定位精确度。由此可见,模糊PID的定位精度有较大提高。
3 结束语
移动机器人定位在移动机器人研究中占据重要地位,基于当前机器人定位不准确的问题,提出一种模糊PID控制移动机器人定位的方法。模糊PID控制移动机器人定位即具有模糊控制器控制机器人定位的优点,又具有PID控制器控制机器人的优点,并通过仿真实验证明,所提方法可以精确地对移动机器人进行定位,并具有良好的应用价值。
[1] 曾志刚,杨 海,黄望军,等.基于自适应滤波与模糊PID的移动机器人导航研究[J].控制工程,2015,22(5):953-957.
[2] 尹梦舒,冯 常.基于WEBOTS的模糊PID控制的研究[J].电子设计工程,2016,24(13):41-44.
[3] 刘开创,施家栋,王建中,等.移动机器人自主返航控制系统设计与实验[J].计算机测量与控制,2016,24(3):71-75.
[4] 骆云志,张春华,王 钤.挖掘机器人电液比例位置自调整模糊PID控制技术研究[J].兵工自动化,2014,33(10):72-76.
[5] 陈珊珊.模糊PID控制在船舶动力定位系统中的应用[J].舰船科学技术,2015,37(3):119-121.
[6] 于 薇,董全林.灰色预测模糊PID控制在调节阀智能定位系统中的应用[J].液压与气动,2015,10(12):39-44.
[7] 熊中刚,叶振环,贺 娟,等.基于免疫模糊PID的小型农业机械路径智能跟踪控制[J].机器人,2015,37(2):212-223.
[8] 周武能,田林林.基于模糊PID算法的无线分布式温度控制系统[J].控制工程,2014,21(3):309-314.
[9] 孙晓明,马 青,曹 虎,等.自适应模糊PID控制在PLC变频调速同步测试中的应用[J].实验室研究与探索,2014,33(6):16-18.
[10] 潘 亮,周武能,张 杨.基于模糊PID主从式方法的多电机同步控制[J].微型机与应用,2016,35(15):5-7.
[11] 李林琛,蒋小平.基于PID控制的移动机器人路径跟踪[J].激光杂志,2016,37(2):110-112.
[12] 白 晶,于喜红,秦现生.基于PMAC的码垛机器人模糊PID算法研究[J].机械设计与制造工程,2016,45(3):46-49.
[13] 孙然然,张寅孩.基于模糊PID控制的光伏系统最大功率点跟踪[J].工业控制计算机,2014,27(5):69-71.
[14] 费红姿,范立云,费景洲,等.基于虚拟仪器的直流电机模糊PID控制实验研究[J].实验技术与管理,2015,32(3):81-84.
[15] 孟令权.基于模糊PID控制器的控制方法研究[J].引文版:工程技术,2016,10(1):50-57.
[16] 张卫钢,马红艳,邱 瑞,等.模糊PID控制算法在窗帘控制中的应用[J].计算机系统应用,2014,23(11):155-159.
[17] 朱奇光, 肖亚昆, 陈卫东,等. 基于萤火虫算法改进移动机器人定位方法研究[J].仪器仪表学报,2016, 37(2):323-329.
[18] 李朕阳, 郎 朗, 陈孟元. 基于SR-CKF的移动机器人动态目标跟踪算法[J]. 电子测量与仪器学报,2016, 30(8):1198-1205.
[19] 孙双双, 李 胜, 郭 毓,等. 基于梯度下降和二分法的移动机器人轨迹规划方法[J]. 计算机测量与控制, 2016, 24(11):201-203.
[20] 周艳聪, 董永峰, 王安娜,等. 新的室内移动机器人自定位方法[J]. 计算机应用, 2015, 35(2):585-589.
[21] 许 坤, 邹 杰, 陈 谋. 基于联邦滤波的室内移动机器人定位[J]. 电光与控制, 2016(9):77-83.
[22] 金 奇. 基于道路信息的户外移动机器人定位技术的研究[D]. 哈尔滨:哈尔滨工业大学, 2015.
Mobile Robot Localization Based on Fuzzy PID Control
Miao Yongmei2, Lin Hui2
(1.Electronic Information Engineering Department ,Baoji Vocational Technology College, Baoji 721304,China;2.Weinan Normal University Network Center,Weinan 714000,China)
Robot localization research has always been the focus of the robotics research, but the shortcomings of the current robot localization method, poor anti-interference ability can't be accurate positioning, mainly due to environmental factors such as interference, position error will gradually increase. For these reasons, puts forward a weighted fuzzy PID control of mobile robot based on value since the positioning method. RTFL localization algorithm principle is given for the mobile robot model, a fuzzy PID controller is designed, according to the error and the rate of change size to choose the fuzzy positioning or PID positioning, for the intelligent mobile robot localization, in order to improve the robot positioning accurate. Through the simulation experiment results show that the fuzzy PID control of the robot from the localization method for mobile robot localization process has good effect, the practical effect is better.
fuzzy PID; mobile robot; location
2017-02-21;
2017-03-08。
陕西省职教学会课题“互联网+”创新教育对策研究(SZJG-1629)。
苗永梅(1971-),女,陕西宝鸡人,硕士研究生,讲师,主要从事计算机、电子类实验教学和机器人方向的研究。
1671-4598(2017)08-0072-03
10.16526/j.cnki.11-4762/tp.2017.08.019
TP242
A
