基于3D打印机控制结构的自动进样器系统设计
2017-11-01郭孔跃马兴录孙燕芹
郭孔跃,马兴录,孙燕芹
(青岛科技大学 信息科学技术学院,山东 青岛 266061)
基于3D打印机控制结构的自动进样器系统设计
郭孔跃,马兴录,孙燕芹
(青岛科技大学 信息科学技术学院,山东 青岛 266061)
自动进样器现已大量应用于分析用仪器设备中;为了实现更快速、高效、智能化的进样,在传统进样器基础上设计了一种基于3D打印机控制技术的液相自动进样器控制系统;设计将三轴联动技术应用于进样器瓶号定位,电机加减速的S形曲线优化方案确保针架起停的稳定性和定位的精度;触摸屏的添加,可将进样器单独使用,增强了人机交互能力,同时还支持485联机通讯离子色谱仪等专用分析仪器,操作的详细提示也可杜绝用户误操作;驱动电路方面采用双极型电机专用控制芯片DRV8825,改进系统的整体结构与组成,优化主控与驱动电路的控制设计;进样器具有结构简单,操作方便,应用面广,自动化和智能化程度高,制造与维护成本低等优点;实际应用测试表明,该系统拥有良好的稳定性,系统整体性能大大提高,满足了设计需求,达到了设计要求。
自动进样器;色谱分析;3D打印;步进电机
0 引言
随着科研和生产技术的不断飞速发展,人们对于样品分析仪器的自动化要求也在不断提高,在样品数量、分析周期、数据准确性、降低工作成本和提高工作效率等方面都提出了更高的要求和标准。自动进样器以其快速连续自动进样、无需人员值守、工作效率高和操作成本低等明显优势,越来越多地应用在自动化分析仪器中[1]。目前绝大多数中低端自动进样器可以完成简单的自动进样和针头、管路的清洗等功能。样品的前期处理,包括自动配样、稀释等仍需要人工来完成。高端自动进样器则存在成本过高的问题,影响了智能化自动进样器的推广。
本设计从自动进样器的结构化、模块化方向出发,参考3D打印机控制结构的X、Y、Z三轴联动技术,设计完成了一款简单实用,多样品位,可靠工作的低成本液体自动进样器。系统除实现最基本的进样和清洗功能外,还增加自动样品稀释、自动配置标样、增添人机交互界面等功能,使得进样器更加自动化和智能化,功能更加全面。系统的硬件设计重点放在结构和功能的优化及可靠性控制上,实现高精度的定量取样和定量稀释等工作,满足样品分析时的高精度要求。
1 系统总体结构
参照3D打印机的控制结构,本设计使用3个步进电机分别实现针头在X、Y、Z三个方向上的精准移动,并在3个方向的两端都安装光电限位开关,确保移动位置的安全可控。电机选择两相混合式42步进电机,特点是输出力矩大、步距角小、动态性能良好等。系统整体结构如图1所示。
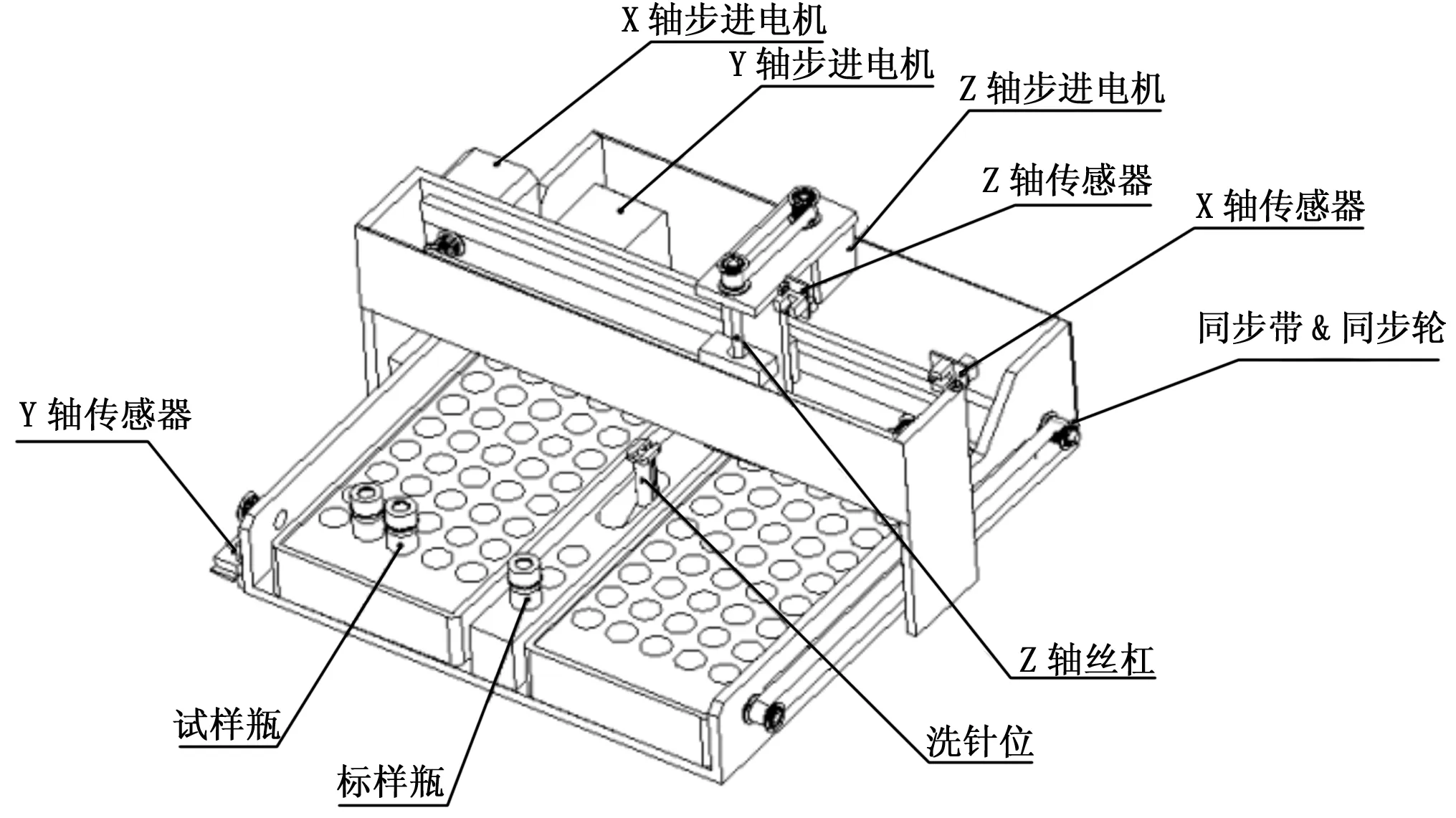
图1 系统整体结构图
X与Y轴方向的运动,系统通过同步带传动,Z轴方向则通过丝杠来实现。由于样品数目过多,设计用两个托盘来放置样品瓶,用户也可设定单独使用任意一个样品托盘。标样瓶的位置单独位于两样品托盘中间,方便用于单个样品进样或标样的制作。
每个样品抽取之前和抽取完成后都需要对针头及管路进行清洗,且清洗次数随着待检测样品的增多而不断增加。综合考虑整体效率和样品数目,系统将清洗针头和管路的清洗位置单独设立并放置于2个样品盘的中间。系统单独设定清洗位置,方便废液的集中处理也大大加快了系统的整体效率。
2 系统控制与系统组成
本设计采用单片机加驱动器的设计思路。步进电机、电磁阀等设备对整个控制板电磁信号的干扰大,系统出于安全稳定性考虑,在主控芯片与外围设备间加光耦进行隔离,既不影响信号的传递同时也可以隔绝外围设备对主控芯片的干扰。系统控制结构如图2(虚线框中仅画出了一组电机的驱动组合)。
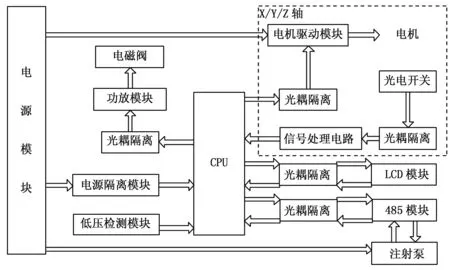
图2 控制结构图
系统工作时,主控芯片根据需求和光电开关反馈的信号,控制电机驱动模块。电机驱动模块则驱动电机按指定方向移动特定步数,步进电机将外部接收到的电磁脉冲信号转变为相应的角位移,实现步进电机的精确定位,其中脉冲个数和脉冲频率的准确控制是关键。
由于要实现复杂的冲洗管路、配样、稀释等操作,设计需要用电磁阀来切换管路,还需要注射泵提供液体流动动力。
主控芯片使用STC公司生产的STC12C5A60S2,是单时钟/机器周期的单片机,指令代码完全兼容传统8051单片机,但速度快8-12倍,且适合强干扰场合的电机控制。芯片本身自带EEPROM,可以存储用户的设置数据,4个高精度16位定时器则完全满足设计的定时需求[2]。双串口的设计则满足了系统外加触摸屏的需求,串口0用作系统与外部PC间的通信,串口1则作为与触摸屏的通信。
此外,芯片的外部低压检测引脚不作为第二复位功能时,可以作为外部低压检测中断。一旦电源电压过低,系统则立即进行现场数据的保存工作,以应对断电当前位置数据的丢失现象。低压检测模块可实现断电现场信息的保存,为设备通电继续完成后续工作提供硬件支持。
系统选用迪文的DMT48270C043_02W屏幕作为系统液晶显示模块。该屏幕4.3英寸,480×272像素,支持串口通讯,使用新的指令架构,集成大量功能于屏幕内部处理,自带ROM存储器,用户只需存储图片和配置文件后即可使用,与外部处理器交互也只需5种指令集[3]。无操作系统的项目研发中,该款触摸屏大大降低用户界面编程的复杂度,节省研发时间。
注射泵选定保定兰格的MSP1-C2工业注射泵。该泵结构紧凑,是用于精密流体传输的OEM产品,此外,该泵控制简单,精度高,效率快,可搭配各种分配阀。通讯方面则选用485通讯格式,这样既可满足触摸屏的控制也可实现上位机对该泵的单独控制。
光电开关主要用作进样器初始化位置的确定,和电机移动距离的安全限制。光电开关利用被检测物对光束的遮挡或反射来检测物体[4]。受所处环境的限制,光电开关易受到外界环境的干扰而检测失误。系统设计时将光耦隔离后的信号先经过施密特触发器。利用施密特触发器的两个高低不同阈值电压,增加了信号源的稳定性和抗干扰性,减少了CPU误判的可能性。
2.1 步进电机驱动控制
进样器样品盘中样品数目较多,为了提高进样器效率,不能每次取完样品后都要校准针头位置,所以要采用连续进样方式。如果每次采样针头位置有细微误差,则这种误差会逐渐递增,最终会导致针头位置完全偏离样品瓶。为了解决移动精度的问题,一方面要选择精度高的电机,另一方面要求电机不堵转、过冲或者失步[5]。
步进电机的堵转或失步主要发生在电机的启动和停止过程中。启动或加速时如果脉冲变化过快,转子由于惯性跟不上电信号的变化速度,则会发生堵转或失步;同样道理,停止时如果减速过快则会出现过冲现象。因此,需要在电机的启动和停止位置附近都进行加减速设计。
通常步进电机升降速曲线主要有阶梯行、直线形、指数形、对数形和S形等[6]。阶梯形和直线形占用CPU时间少,响应速度快,但加减速耗时长,在加速的起始位置和减速的终止位置仍存在电机速度和角加速度的突变,电机运动过程中仍有较大冲击。指数形和对数形曲线速度变化比较平滑,速度变化率不是恒定而是时刻变化的,能较好地适应电机变化的运动状况。
设计使用S形曲线加减速控制模型,它综合了指数和对数曲线的优点,加速开始时使用指数曲线,接近加速终止时使用对数曲线,这样便很好地解决了指数曲线低频升速太快和对数曲线高频降速太快的问题。S形曲线加速控制如图3所示。
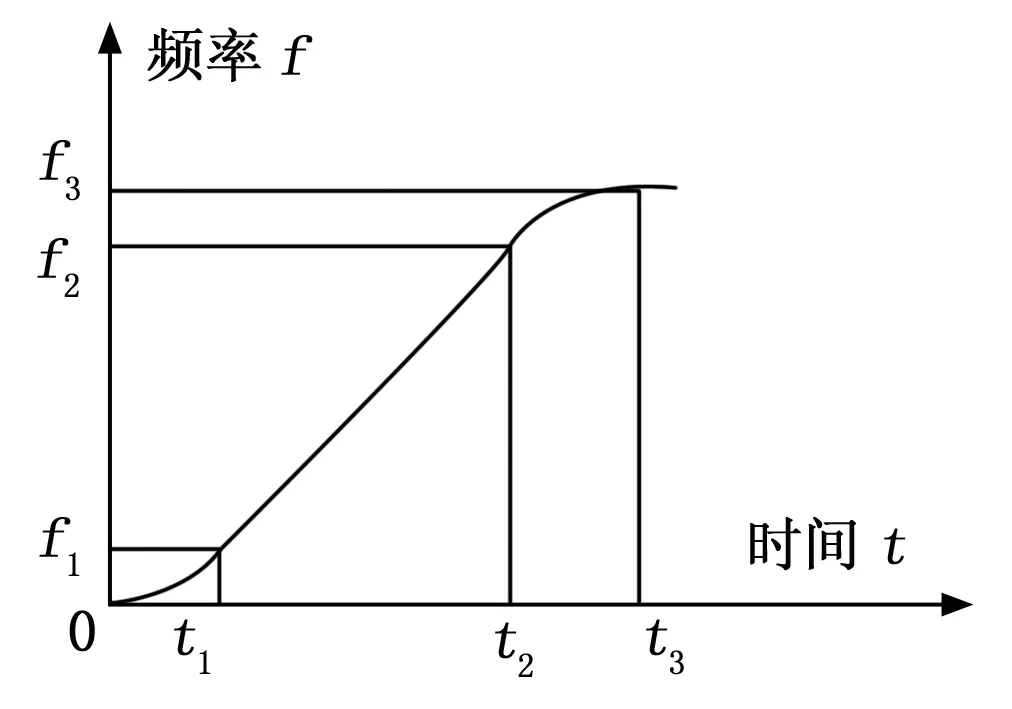
图3 步进电机升速运动速度曲线
升速曲线共由三段组成,中间是直线,两侧则是抛物线,为了使电机运行平稳,则过渡处函数的斜率及函数值应该相等,再利用各曲线段f-t的函数关系,对f(t)函数进行积分,则可得到各个线段对应的控制脉冲数。最后利用牛顿迭代法求解第n个脉冲的时刻。
步进电机高速运行时,相邻脉冲间时间间隔短,处理器不能实时完成迭代运算。因此,实际使用时需要将各个离散点速度所需要的定时值事先固化到ROM中,系统运行时用查表法查出所需要的装载值,减少CPU的运算时间,提高系统的实时性和稳定性。同样道理,电机的减速阶段,则仍可逆序调用该表,实现电机的S形曲线减速[7]。
驱动芯片的选择上,选择3D打印机常用的DRV8825驱动芯片。DRV8825芯片是德州仪器(TI)为打印机、扫描仪和其他自动化设备设计的集成电机驱动芯片。该芯片控制简单,占用PCB空间小,可驱动一个双极型电机,承受2.5A的峰值电流(24 V、25℃应用环境下),集成了2个H桥电路,最小可实现1/32的细分,满足电机控制的精度要求。此外,芯片还集成了快速响应的过热、短路、欠压及交叉传导保护等功能电路,完全满足设计的需求[8]。
2.2 注射泵及电磁阀控制
注射泵作为液体流动的动力来源,是本设计不可或缺的。注射泵的使用要考虑到进样残留、进样速度和进样重现性等问题,此外还要考虑到与系统的通信问题。
注射泵作为一个独立的器件,系统只能按照其原有的协议控制,这就减弱了整个系统的连贯性控制,系统无法完全掌控注射泵的实时状态。出于系统安全性考虑,本设计需要实时查询泵状态,并根据反馈信息情况作出相应的处理。实时查询对于单片机而言需要用额外的定时器来完成,系统每隔1s查询一次注射泵的状态,并根据注射泵的推杆位置来确定注射泵的运动状态。
电磁阀是通过通电线圈产生的磁力来开启和关闭阀门,为了保证开启状态的稳定性,需要一直通电控制。设计中电磁阀使用24 V的通电电压,使得电磁阀的发热情况不容忽视,如果长时间导通则极易使其烧毁。为此,系统借鉴PWM(脉冲宽度调制)的控制原理,对该电磁阀加载PWM波控制的通断电压,从而实现电磁阀发热量合适下的通路稳定性。设计电路图如图4。
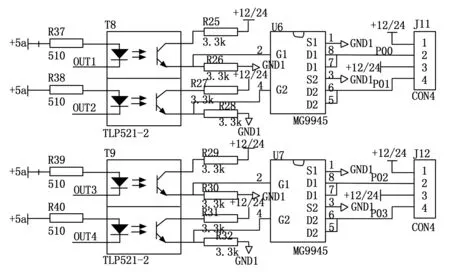
图4 电磁阀电路设计图
3 控制系统软件设计
系统软件的设计需要兼顾效率与安全,在满足系统功能的前提下尽可能地增加安全措施,减少用户误操作的可能性。系统初始化主要完成CPU硬件初始化、读取存储的电机纠偏量等配置参数、控制电机移动到初始位置和LCD显示初始化等操作。主循环程序负责检测串口通讯数据并及时作出回应,同时完成步进电机、电磁阀、注射泵等的控制,主程序流程如图5所示。

图5 主程序流程图
出于安全考虑,进样器控制Z轴运动的中断优先级最高。在扎针或抬针过程中,进样器不能同时移动到其它瓶号位置,保证针头的安全性和防止用户的误操作。同样道理,每次用户发送的移动针头命令均有隐含的针架抬起命令。
为了减轻单片机处理数据压力,设计将触摸按钮等体现触摸位置的因素提前处理后存储到触摸屏本身自带的存储器中。为了达到良好的按压视觉效果,同样将按钮按压效果做成配置文件并存储,触摸屏与单片机之间只需收发控制命令而无需数据交流。
考虑到使用人员对该仪器的灵活配置,本设计对功能进行了充分细化。用户主界面主要分样品模式、标样模式、系统维护、系统设置等几部分,各模块分别引导用户完成特定的功能。主界面如图6所示。
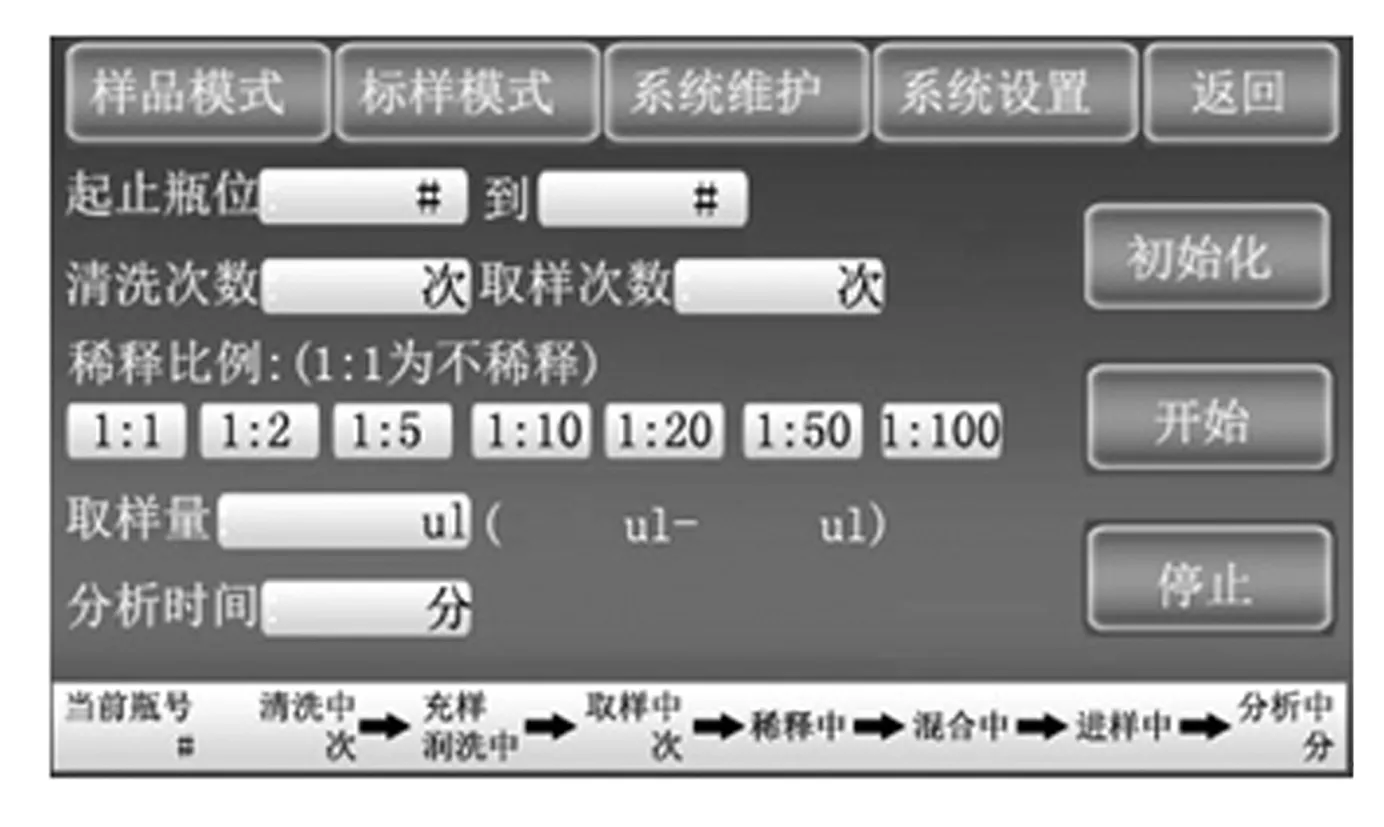
图6 触摸屏主界面
样品模式可实现与离子色谱仪等分析仪器的配套使用。设定基本参数后可与任何分析仪器实现无缝连接,自动完成清洗进样等功能,且过程进度可在屏幕底部状态栏显示。为了满足用户对样品的不同稀释比例需求,软件可选定稀释比例。不同注射泵体积不同,用户选定稀释比例后软件自动限定进样量,并将具体范围限定显示出来,方便用户替换使用不同容积的注射泵。
为了满足毫升级别的精准进样量,进样器液体连通管路中的残留液体也需要考虑,设计增加了冲样润洗过程,该过程是将待测样品先充满进样器到电磁阀的管路,并将其它管路清洗,通过电磁阀的转换可以实现精准进样。
标样模式是系统针对2个样品盘中间位置处的样品瓶单独设定的,可满足用户大剂量的样品进样、配样、稀释等功能要求。该模式下用户可单独设定进样量和稀释量,满足用户大剂量、任意稀释比例等的需求。
系统维护菜单则可实现用户的手动操作,可对进样器所有动作单步控制,包括控制抬针、落针、移动到任意瓶号、注射泵单独抽取、注射等,大大提高了自动进样器使用的灵活性和应用性。单步控制还可方便查找故障位置,增强了设备的可维护性。
系统设置界面则主要实现电机速度、落针距离、样品抽取总量、用户密码等的设定,满足用户更换注射泵、调整针管长度、位置纠偏等的需求。
4 系统测试
系统测试主要包括系统整体性能和安全性两方面。测试样机进行至少6小时连续定位与进样,同一个样品盘中随着检测样品瓶号的递增,系统定位并未出现明显的偏差,最末尾瓶号处,针头偏离中心位置不足1 mm,但扎针位置的可重现性良好,全部为同一针孔。当两个样品盘全部样品都经过测试时,样品盘定位出现明显偏差,最末尾瓶号处,针头偏离中心位置处约2 mm,但同样可重现性良好,多次测试并未出现第二个针孔,电机运行平稳。两个样品盘都使用时,样品检测总量超过100位,系统为了更快速定位并没有一瓶一校验位置,所以累计误差会在最后一个样品瓶处达到最大,但2 mm的误差对于半径4 mm的瓶盖属于可接受范围,完全满足定位的精度需求。
其它方面,系统设定自动抽样、稀释、混合、进样等命令后,系统可正常完成全部命令,无漏测样品,漏运行既定步骤等现象出现。设定的紧急停止按钮拥有中断级别最高,实现系统任何运行阶段的紧急停止操作。
安全性测试方面,系统对超出最大瓶号的位置做出忽略处理。切断传感器后,系统能在超出既定轨道位置后及时停止,保证系统即便机械碰撞后仍能正常工作。
5 结束语
基于3D打印机控制结构的X、Y、Z三轴联动技术在雕刻机、3D打印机等领域已经比较成熟,本设计将该控制结构应用于液相自动进样器中,并根据实际需求改进了系统的软硬件,设计成本大大降低。使用现有成熟的驱动模块,省去自行设计的繁琐,不仅有利于系统调试,还降低了研发成本,缩短了研发周期。新型自动进样器在原有进样器功能的基础上增加了自动稀释、自动配样等功能,进样效率等都得到了很好的提高。
与传统盘式自动进样器相比,本设计定位精度更高,若配以箱式外观,则可大大缩小系统整体体积,有效保护针架等精密仪器。
[1] 张西咸, 陈 莲, 李海洋, 等. 一种低成本的气相色谱仪液体自动进样器的设计[J].现代科学仪器, 2007, 17(3): 49-53.
[2] 宏晶科技. STC 系列单片机器件手册[Z].宏晶科技,2009.
[3] 周 峰, 朱宗玖. 电动汽车充电桩迪文 DGUS 触摸屏的实现[J]. 科技视界, 2013 (3): 45-46.
[4] 杨帮文. 新型接近开关和光电开关实用手册[M].北京:电子工业出版社,2009.
[5] 谭秀腾, 郭小定, 李小龙, 等. 基于 ARM 的桌面型 3D 打印机控制系统设计[J]. 应用科技, 2014, 41(5): 57-61.
[6] 刘宝志. 步进电机的精确控制方法研究 [D]. 济南: 山东大学, 2010.
[7] 杨 猛. 3D 打印驱动电路设计及文件切片算法研究[D].北京: 北京印刷学院信号与信息处理, 2014.
[8] 吴 迪. 基于 DRV8825 的打印机电机驱动电路设计[J].电子技术与软件工程, 2013 (11): 62-62.
Design of Automatic Sampler System Based on 3D Printer Control Structure
Guo Kongyue, Ma Xinglu, Sun Yanqin
(School of Information Science and Technology, Qingdao University of Science and Technology, Qingdao 266061, China)
Automatic samplers are now widely used in analytical instruments and equipments. In order to achieve more faster, efficient and intelligent injection, a liquid-phase automatic sampler system designed based on the traditional sampler and 3D printer control technology. Three-axis linkage technology used to position the sampler bottles. The optimization solution of acceleration and deceleration can ensure the stability of needle in the motor starting or stopping process and the positional accuracy. The using of touch screen can make the sampler used alone. It can enhance the capacity of human-computer interaction and can also support the 485 communication with ion chromatography equipments or other special analytical equipments. The operation prompt can prevent the user operation errors. The system used the dedicate control chip DRV8825 designing for bipolar motor as drive circuit. It can improve the overall structure and composition, optimize the control of the master and drive circuit. The sampler has the advantages of simple structure, convenient operation, wide application, high degree of automation and intelligence, low cost of the manufacturing and maintenance. The practical application tests show that the system has good stability. The overall system performance improved greatly, and reached the design requirement.
automatic sampler; chromatographic analysis; 3D printing; stepper motor
2017-02-11;
2017-03-07。
山东省自然科学基金项目(ZR2013FL013)。
郭孔跃(1989-),男,山东潍坊人,硕士研究生,主要从事嵌入式软硬件方面的研究。马兴录(1970-),男,山东临沂人,副教授,硕士研究生导师,主要从事嵌入式系统与自动化控制方面的研究。
1671-4598(2017)08-0054-04
10.16526/j.cnki.11-4762/tp.2017.08.015
TH864
A