浅析纯电动汽车驱动防滑控制
2017-10-31雷金平
雷金平
【摘 要】本文将电动汽车作为研究对象,并对其建立动力学模型,然后介绍了电动汽车的防滑控制方法,更具防滑控制方法设计PID与模糊驱动防滑控制器,并查看此种方法的效果,得出结论此方式能够在很短的时间内是滑移率趋近于零。
【关键词】电动汽车;防滑控制;PID控制;模糊控制
引言
由于我国发展迅速,带来的环境影响加剧,为防止环境问题继续加剧,电动汽车的研制得到国家的大力扶持,并且世界上很多公司都在研制电动汽车,电动汽车成为了世界的焦点。随着电动汽车的防滑控制也成为了热点,驱动防滑控制是通过改变轮胎上的制动力或者是发电机上的转矩来达到控制驱动力,进而防止出现车轮的动力大于轮胎和地表的摩擦力,并且有效的控制车轮的驱动力还能够很好的掌控电动汽车的稳定性以及操作性。
1.电动汽车防滑控制原理
驱动防滑控制系统是一种有效减小电动汽车在驱动过程中发生滑转现象的控制系统,进而保证电动汽车的安全驾驶。通过大量的实验证明,电动汽车发生滑转的概率和道路的摩擦系数有关系。为有效的避免在驱动时出现滑移的现象,有效的控制滑移率是十分有必要的。
滑移率计算公式:
(1)
其中:为车轮速度,km/h;为车速,km/h。
摩擦系数为,通过实验证明在兼顾电动汽车的稳定性、动力性的同时,在保证高的安全系数情况下,车轮的滑移率应该有效的掌控在0.1~0.3之间,这样电动汽车既有良好的动力性又有很好的侧向稳定性。通过对滑移率的控制可以影响摩擦因素的大小,本文重点考虑滑移率对纵向摩擦因数的影响。电动汽车的驱动防滑控制系统充分的利用纵向摩擦系数与滑移率的关系,通过合理的控制,将滑移率控制在0.1~0.3之间。
2.电动汽车数学模型
2.1本文应用最为先进的永磁无刷直流电机,直流电机的参数见表1和表2。
2.2电机的选择
依据车速计算电机最大功率(kW),
(2)
为滚动阻力,单位为牛顿;,为滚动阻力系数,G=Mg,M为满载总质量(KG),为阻力角;,为空气阻力系数,A为迎风面积,单位为平方米。
根据式(2)代入电动汽车参数,得到最大功率为32.9 kW,因此选用两台额定功率为17KW的电机就可以满足要求。
2.3永磁无刷直流电机模型
本文选用直流电机是因为设想的控制不是十分的复杂。永磁无刷直流电机具有很大哦哦能量密度以及效率,所以是应用较为广泛的电机。
2.4滑移率计算模型
电动汽车驱动的防滑系统是依靠控制滑移率s来控制车辆的稳定性的,然而滑移率s是依据汽车速度与车轮速度之间的计算公式得到的,如果发生滑移的现象,那么轮速一定会超过车速的,这时滑移率就可以直接用公式(1)来表示。
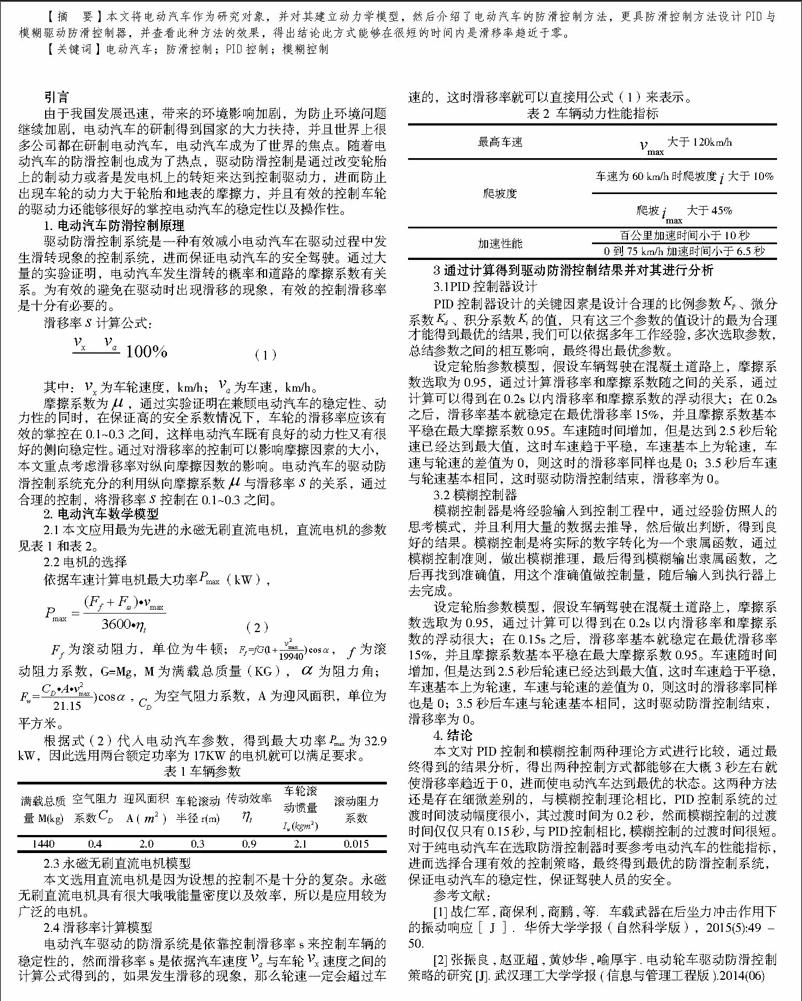
3通过计算得到驱动防滑控制结果并对其进行分析
3.1PID控制器设计
PID控制器设计的关键因素是设计合理的比例参数、微分系数、积分系数的值,只有这三个参数的值设计的最为合理才能得到最优的结果,我们可以依据多年工作经验,多次选取参数,总结参数之间的相互影响,最终得出最优参数。
设定轮胎参数模型,假设车辆驾驶在混凝土道路上,摩擦系数选取为0.95,通过计算滑移率和摩擦系数随之间的关系,通过计算可以得到在0.2s以内滑移率和摩擦系数的浮动很大;在0.2s之后,滑移率基本就稳定在最优滑移率15%,并且摩擦系数基本平稳在最大摩擦系数0.95。车速随时间增加,但是达到2.5秒后轮速已经达到最大值,这时车速趋于平稳,车速基本上为轮速,车速与轮速的差值为0,则这时的滑移率同样也是0;3.5秒后车速与轮速基本相同,这时驱动防滑控制结束,滑移率为0。
3.2模糊控制器
模糊控制器是将经验输入到控制工程中,通过经验仿照人的思考模式,并且利用大量的数据去推导,然后做出判断,得到良好的结果。模糊控制是将实际的数字转化为一个隶属函数,通过模糊控制准则,做出模糊推理,最后得到模糊输出隶属函数,之后再找到准确值,用这个准确值做控制量,随后输入到执行器上去完成。
设定轮胎参数模型,假设车辆驾驶在混凝土道路上,摩擦系数选取为0.95,通过计算可以得到在0.2s以内滑移率和摩擦系数的浮动很大;在0.15s之后,滑移率基本就稳定在最优滑移率15%,并且摩擦系数基本平稳在最大摩擦系数0.95。车速随时间增加,但是达到2.5秒后轮速已经达到最大值,这时车速趋于平稳,车速基本上为轮速,车速与轮速的差值为0,则这时的滑移率同样也是0;3.5秒后车速与轮速基本相同,这时驱动防滑控制结束,滑移率为0。
4.结论
本文对PID控制和模糊控制两种理论方式进行比较,通过最终得到的结果分析,得出两种控制方式都能够在大概3秒左右就使滑移率趋近于0,进而使电动汽车达到最優的状态。这两种方法还是存在细微差别的,与模糊控制理论相比,PID控制系统的过渡时间波动幅度很小,其过渡时间为0.2秒,然而模糊控制的过渡时间仅仅只有0.15秒,与PID控制相比,模糊控制的过渡时间很短。对于纯电动汽车在选取防滑控制器时要参考电动汽车的性能指标,进而选择合理有效的控制策略,最终得到最优的防滑控制系统,保证电动汽车的稳定性,保证驾驶人员的安全。
参考文献:
[1]战仁军,商保利,商鹏,等.车载武器在后坐力冲击作用下 的振动响应[J].华侨大学学报(自然科学版),2015(5):49-50.
[2]张振良,赵亚超,黄妙华,喻厚宇.电动轮车驱动防滑控制策略的研究[J].武汉理工大学学报(信息与管理工程版).2014(06)endprint
