基于多舵机协同操作的避障蜘蛛机器人设计
2017-10-31卫驰宋家宾黄家盛尚晓宇陈健超
卫驰+宋家宾+黄家盛+尚晓宇+陈健超

【摘 要】本文针对多舵机协同操作的蜘蛛机器人设计,提出蜘蛛机器人的行走与避障方案,利用红外传感器,实现了蜘蛛机器人的稳定行走与避障。
【关键词】机器人;传感器算法;机械臂控制
引言
随着科技的进步以及人类对于智能化的需求,智能科学和机器视觉成为近些年研究的热点。机器人相比于人工操作有着巨大的优势。首先,机器人将人类从繁杂的任务中解放出来,且机器人的效率更高,效果更好,成本更低;其次,某些领域的工作可能会有一定的危险,使用机器人可以有效地避免人类受到伤害。
而小型机器人可以为验证大型机器人的相关算法提供平台,因此全球各地涌现出了大批机器人粉,通过机器人实现了很多奇思妙想。而市面上已有的机器人产品,多为轮式或履带式机器人。这两种类型的机器人的运动功能实现起来较为简单,但是遇到阶梯、沙地等非常规场地时,行动会受到极大限制。为此,我们小组在仿生学的基础上,通过对蜘蛛运动的观察,决定设计出一款六足机器人,并以此机器人为平台,利用红外传感器,实现蜘蛛机器人的避障功能。
1.控制方案
蜘蛛机器人的运动控制是通过观察并模仿蜘蛛行走时的腿部运动姿态,用单片机输出特定的 PWM波形传给18个舵机,以实现蜘蛛机器人六条腿的相互配合工作使得蜘蛛机器人的稳定行走。控制系统的软件设计基于IAR Embedded Workbench编程环境,单片机使用飞思卡尔公司K64F芯片,程序使用C 语言实现。
2.行走方案
自然界中,六足昆虫在行走时大部分都不是六条腿同时前进,而是将六条腿分为两组,用稳定的三角型支撑结构,互相交替前进,其中三角步态最为常见。蜘蛛在运动过程中始终保持一边一条腿和另一边的两条腿同时着地,形成稳定的三角形结构,保持身体平衡。
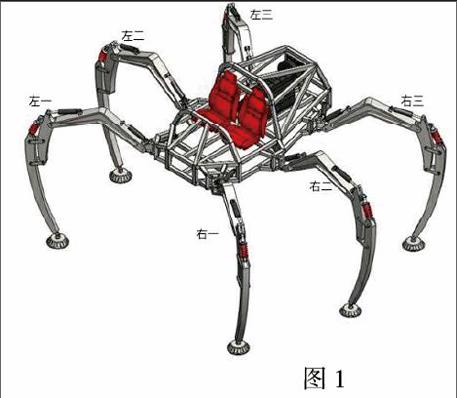
如图1所示,我们标定蜘蛛的左边三条腿从前到后的顺序分别为左一、左二、左三,右边三条腿从前到后的顺序分别为右一、右二、右三。蜘蛛直行时的腿部运动为,步骤一:左一、左三、右二下部关节向内转动抬起,左二、右一、右三支撐身体,左一、左三、右二上部关节正向转动使腿向前,然后下部关节向下转动落地;步骤二、左二、右一、右三下部关节向内转动抬起,左一、左三、右二支撑身体,同时上部关节反向转动将蜘蛛身体重心前移,左二、右一、右三下部关节向外转动落地。,步骤一步骤二如此反复,依靠上部关节前后划动来实现直行过程;蜘蛛横向运动时与直行时抬腿顺序一致,依靠中部关节左右转动实现横向运动,模仿了最典型的三角步态的行走方式,重心低,稳定性好。
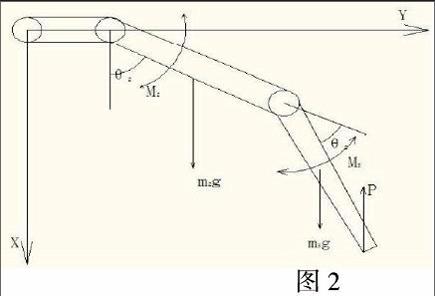
蜘蛛机器人的每条腿由三个舵机和若干支撑杆组成,一个蜘蛛机器人装有六条腿,每条腿上有3个舵机。通过18个舵机的偏转来模仿蜘蛛腿的迈动以实现机器人的运动功能。蜘蛛机器人腿部关节示意图如图2所示。
3.避障方案
我们在机器人四个方向均安装一个红外传感器来实现避障功能。在这里我们选用了GP2Y0A02YK0F红外距离测量传感器单元,由PSD集成组合(位置敏感探测器) 、IRED(红外发光二极管)和信号处理电路。各种物体反射利率,对环境温度和运行时间不易受到影响的距离检测。由于采用三角测量方法,该装置输出对应的电压检测距离,所以这种传感器还可以用来作为接近传感器。红外传感器检测到的值与障碍物之间的距离之间的关系如图3所示。
这里存在一个问题,从曲线上来看一个电压值会对应两个距离值。但由于左半边的上升曲线斜率过大,电压变化速度过快,在实际测试过程中发现在此段距离内采集到的电压数据很不稳定,所以为了避免采集到的电压数据出现在曲线峰值左半边的情况,在机械设计时只考虑利用曲线峰值的右半边,通过简单的加减换算,就能将采集到的电压数据对应到唯一的距离上,故当返回电压值大于2v 时我们可以判断前方有障碍物,从而让蜘蛛机器人进行横向运动。
4.评测结果
经过调试,蜘蛛机器人可以稳定的运行并完成前进后退左右移动等动作。在前方30cm左右遇到障碍物,可以识别出前方的障碍物,若左右两侧无障碍物,则向左移动直到前方无障碍物继续前行,同时检测右侧,直到右侧无障碍物,向右移动回到原定路线继续前行。
5.结论
该蜘蛛机器人使用飞思卡尔K64F单片机作为核心控制单元,编写了蜘蛛机器人的控制和避障程序,最终实现了目标。
参考文献:
[1]陈恳等.机器人技术与应用[M].北京:清华大学出版社,2006.
[2]林良明.仿生机械学[M].上海:上海交通大学出版社,1991,4:21-23.
[3]GP2Y0A02YK0F DATASTEET,2006.
[4]钱晋武.六足步行机静态稳定的必要性与充分性[J].上海科技大学学报,1992 Voll5 No4:200-203.
[5]蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[6]马惠钦.昆虫与仿生学浅谈[J].昆虫知识.2003,03:12-13.endprint
