三相电压型PWM整流器VOC与DPC比较研究
2017-10-31景利学
景利学
(甘肃省建筑设计研究院有限公司,甘肃兰州730030)
1 引言
PWM整流器因具有单位或可调的功率因数、电能双向流动、能有效抑制谐波等优点而被称为真正意义上的“绿色变流”装置[1-2]。PWM 整流器在无功补偿、有源滤波、统一潮流控制、超导储能、高压直流输电、电气传动以及新型能源并网等领域有着广阔的应用前景[3]。PWM整流器VOC是通过电网电压矢量定向确定参考坐标系,控制交流侧电流矢量与电网电压同步旋转,使其相位一致,以实现单位功率因数运行[4]。DPC是通过分析整流器瞬时功率流向,对瞬时有功功率和瞬时无功功率进行实时跟踪,以实现单位功率因数运行[5]。本文对PWM整流器VOC和DPC算法进行综合比较研究,得出了一些有参考价值的结论。
2 电压型PWM整流器模型
2.1 电压型PWM整流器VOC模型
电压型PWM整流器主电路拓扑结构如图1所示。
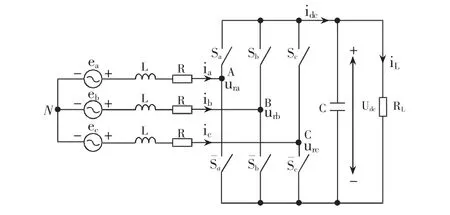
图1 电压型PWM整流器主电路拓扑结构
图中 ea、eb、ec为三相对称电源电压;ia、ib、ic为三相线电流;Sa、Sb、Sc为整流器的开关函数,Sj定义为单极性二值逻辑开关函数。Sj(j=a、b、c)=1(上桥臂开关导通,下桥臂开关关断),Sj(j=a、b、c)=0(下桥臂开关导通,上桥臂开关关断);Udc为直流电压;R、L为滤波电抗器的电阻和电感;C为直流侧电容;RL为负载;ura、urb、urc为整流器的交流侧电压;iL为负载电流。
三相PWM整流器在两相同步旋转坐标系中的数学模型为[6]:
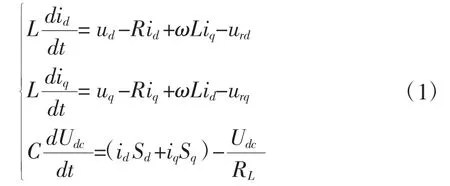
式中,urd=SdUdc,urq=SqUqc,urd和 urq是整流器交流侧输入电压矢量在d、q轴上的分量。Sd、Sq分别为开关函数在d、q轴上的分量。
基于PWM整流器在两相同步旋转坐标系中的数学模型,利用双闭环解耦结构,构建VOC系统的控制系统结构图如图2所示。
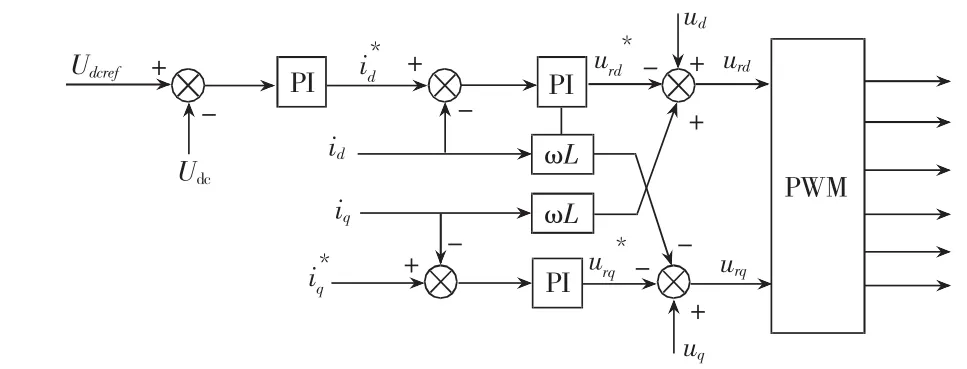
图2 电压型PWM整流器VOC系统结构图
2.2 电压型PWM整流器DPC模型
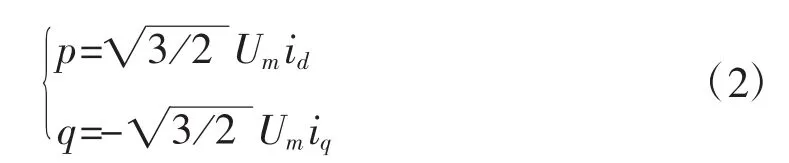
根据式(1)和式(2)可得整流器 DPC数学模型为[7]:
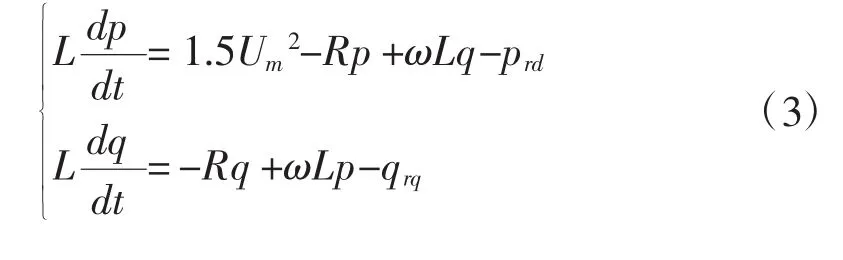
电压型PWM整流器DPC系统结构如图3所示,它由主电路和控制电路构成。主电路包括交流电源、滤波电抗器、整流器、直流侧电容和负载;控制电路包括交流侧电压电流测量和功率计算单元、扇区判断单元、功率滞环比较器、直流电压PI控制器和开关表。
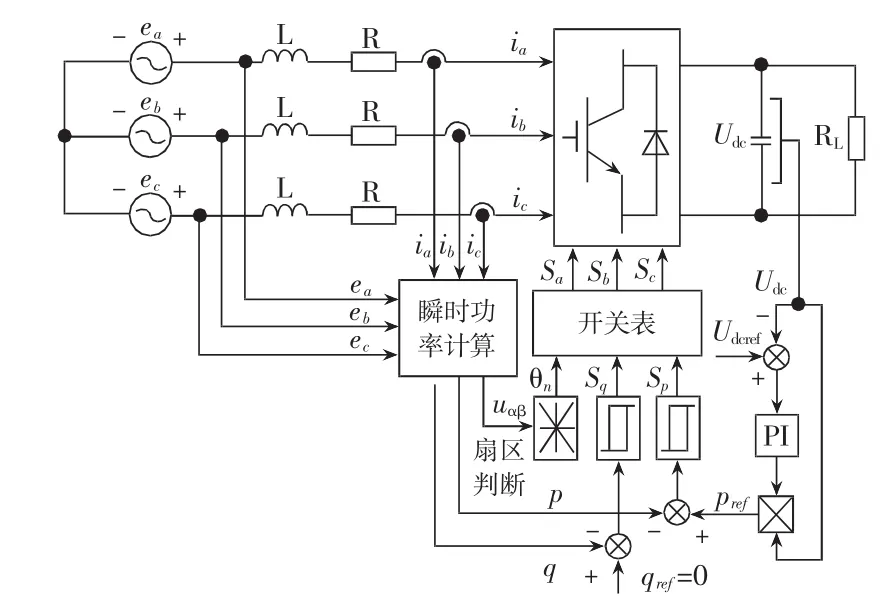
图3 电压型PWM整流器DPC系统结构图
3 电压型PWM整流器系统仿真
3.1 电压型PWM整流器VOC仿真
仿真中所取系统参数为:电源相电压Um=311V,直流侧参考电压Udcref=650V,交流侧电感L=8mH,直流侧电容 C=500μF,额定输出功率 PN=15kW,开关频率 f=5kHz,滤波系数 Tc=0.0002;电压环 PI控制器参数 KPU=0.114,KIU=15.126;电流环 PI控制器参数 KPI=106.6,KII=284.4。按上述参数在 Simulink环境下构建PWM整流器VOC系统的仿真模型,所得仿真曲线如图4所示。负载电流在0.08s反向,Udc出现较大的超调,0.1s后恢复至给定值,调节过程很快,约一个工频周期。交流侧电压与电流相位相反,d轴电流id由正变负,而q轴电流iq仍保持为0,此时交流侧功率因数为-1,系统工作于能量回馈模式。
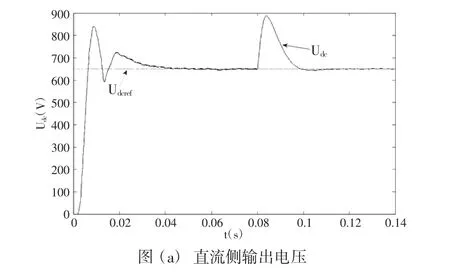
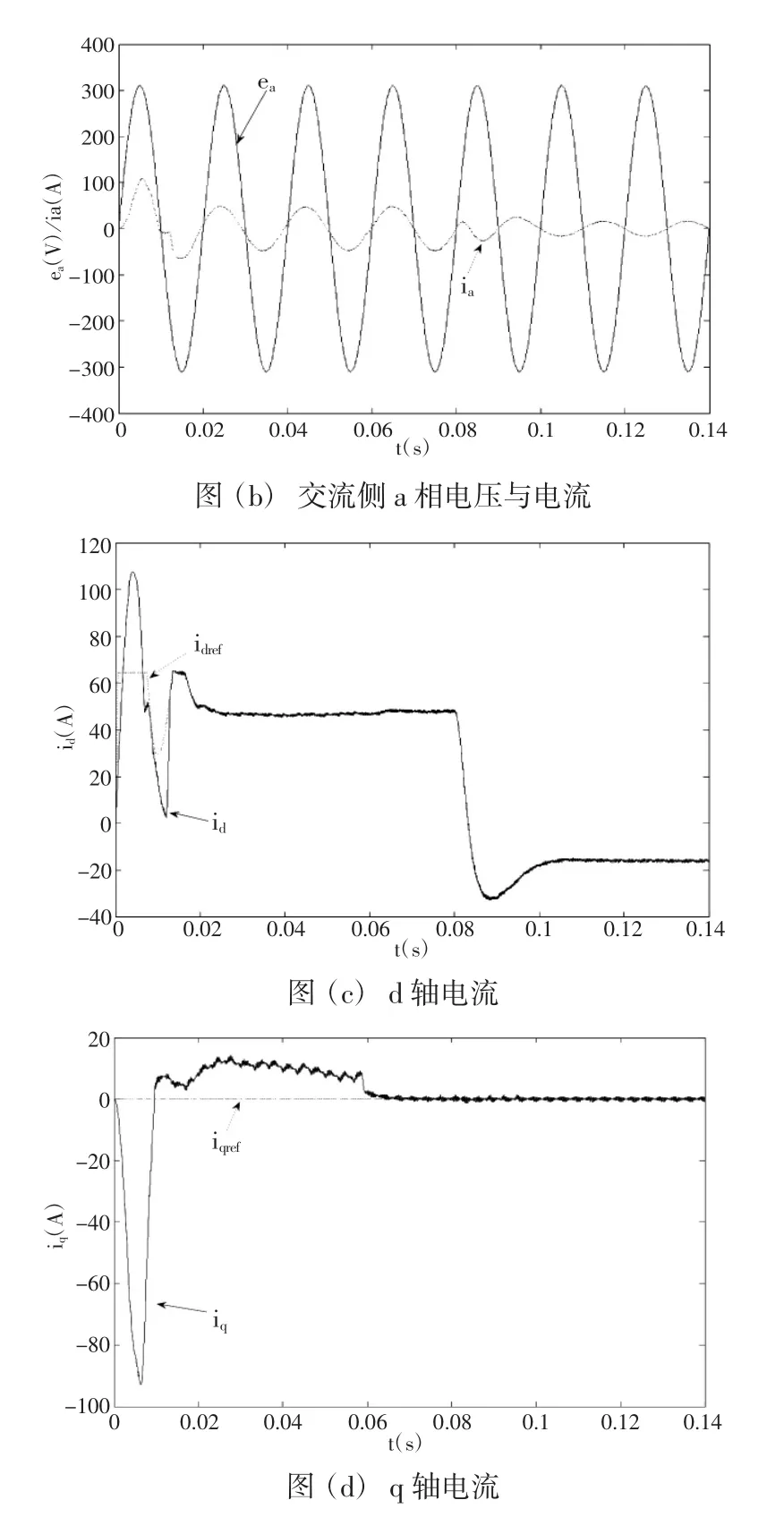
图4 电压型PWM整流器VOC系统仿真曲线图
3.2 电压型PWM整流器DPC仿真
仿真中所取系统参数为:电源相电压Um=311V,直流侧参考电压 Udcref=650,交流侧电感 L=8mH,直流侧电容 C=500μF,额定输出功率 PN=15kW,平均开关频率 fav=5kHz,滤波系数 Tc=0.0002,电压环 PI控制器参数 KPU=0.114,KIU=15.126,瞬时有功功率滞宽Hp=400W,瞬时无功功率滞宽Hq=400Var。按上述参数在Simulink环境下构建PWM整流器DPC系统的仿真模型,系统的仿真曲线如图5所示。负载电流在0.1s反向,Udc出现较大的超调,0.1s后恢复至给定值。交流侧电压与电流相位相反,瞬时有功功率p由正变负,而瞬时无功功率q保持为0,此时交流侧功率因数为-1,系统工作于能量回馈模式。
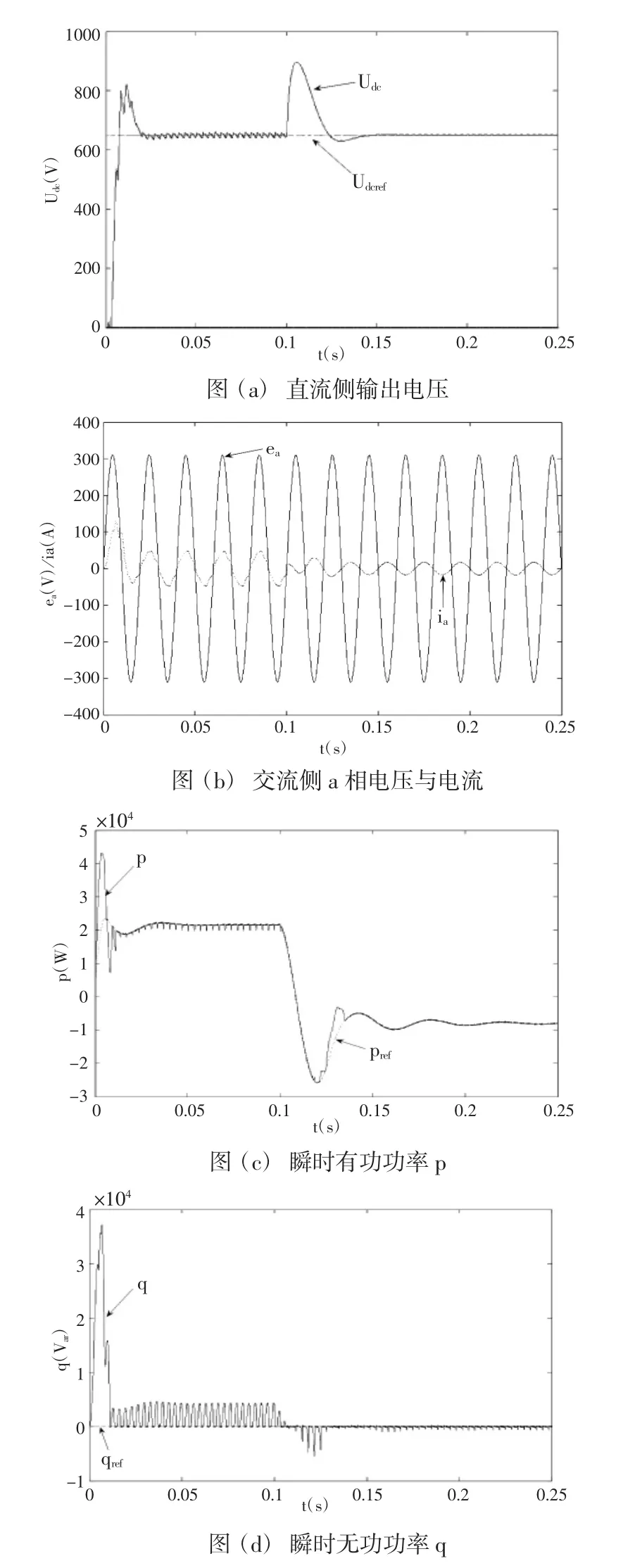
图5 电压型PWM整流器DPC系统仿真曲线图
4 电压型PWM整流器VOC与DPC比较
以仿真得到的波形数据为基础,对电压型PWM整流器VOC与DPC进行详细的比较。
4.1 启动过程
启动过程实际上是交流侧向直流侧电容充电的过程,此时系统的各个物理量的变化都很剧烈,超调较大。对于VOC系统,充电过程的响应速度取决于对有功电流和无功电流的控制。由仿真波形可以看出,有功电流能够快速地跟随给定值,而无功电流的响应速度较慢,经过3个周波才达到给定值。出现这个现象的原因是因为有功电流的给定值是直流电压外环的输出,为达到外环的控制效果,内环的计算给定输出变化范围大,这样使得有功电流的调节速度较快。无功电流的给定设置始终在0位,使得无功电流的响应速度较慢。由表1可知,两种方案中对直流电压的超调相差4%,VOC超调稍大,相反的,DPC系统有功功率和无功功率的超调均较大,且均大于VOC系统有功电流与无功电流。
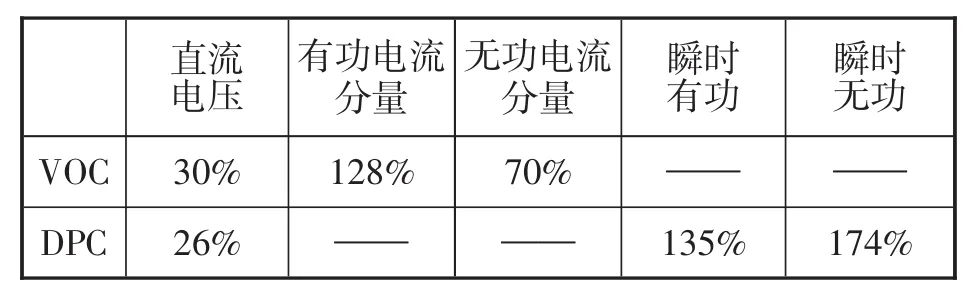
表1 启动超调量比较
4.2 直流侧电压纹波
DPC系统中滞环调节器类似比例调节器。当环宽足够小时,其对有功和无功的控制精度高,对内环的响应速度很快,反映在电压外环上,其使稳态下直流电压仍然有波动。VOC系统采用坐标变换技术,使得交流量的控制转换为直流量的控制,因此,直流电压的纹波含量很少,电压质量较DPC系统高。
4.3 交流侧电流谐波
交流侧电流波形的正弦化程度是衡量控制策略优劣的一项重要指标,这里选择VOC与DPC运行于稳态下的电流波形做FFT分析。由图6可知,VOC系统交流电流谐波含量为 THD5=0.21%,THD11=0.19%,THD17=0.097%,总电流畸变系数为THD=0.38%,正弦化程度较高。DPC系统交流电流谐 波 THD5=6.12% ,THD7=5.61% ,THD11=1.02,THD13=0.87%,总电流畸变系数为 THD=8.55%。由此可见,在稳态情况下交流侧的电流波形畸变方面,VOC系统谐波含量较小,优于DPC系统。
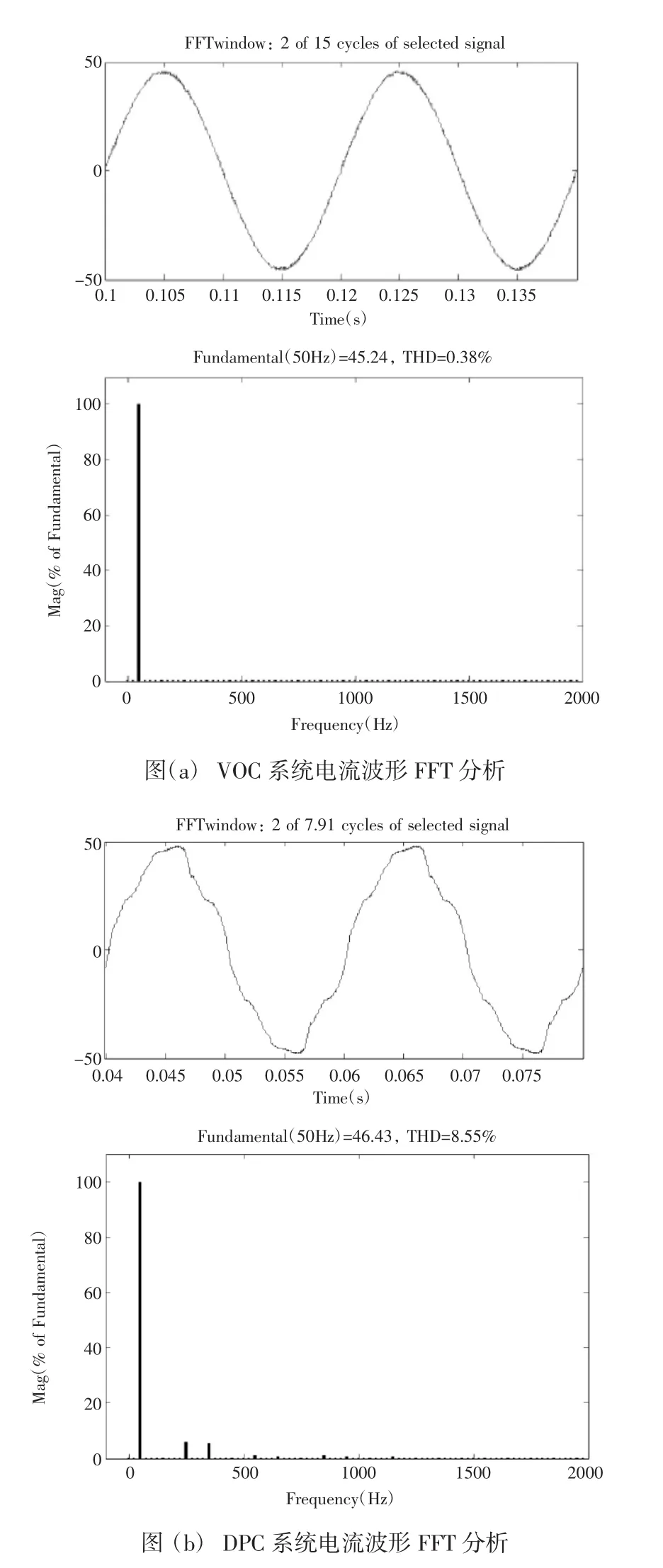
图6 电压型PWM整流器VOC和DPC的FFT分析
4.4 跟踪与抗扰性
VOC跟随给定过程迅速,过渡过程大概有2个工频周期,有功电流响应曲线也良好,且精度较高,而无功电流始终保持为0。DPC系统对给定也呈现良好的跟随性,但随着给定值的增大,直流电压纹波也增大,波形变得粗糙,在一定程度上限制了其调节范围。对于扰动,两个系统都呈现良好的抗扰性。
5 结束语
通过对PWM整流器VOC和DPC算法进行综合比较研究,得出了有一定参考价值的结论。电压型PWM整流器VOC控制策略具有开关频率固定、调制方案灵活、采样速率要求较低等优点,同时它具有坐标变换计算复杂、解耦算法计算量大、控制器参数依赖于电路参数等不足。DPC控制策略具有无特殊PWM算法、无电流内环调节、棒棒控制、动态性能好、鲁棒性强、静止坐标变换等优点,同时具有开关频率不固定、直流电压纹波大、需要较高采样频率才能使得交流电流波形正弦化等不足。
