一种有效抑制阵列后方声源的心形指向性传声器阵列
2017-10-26黄朝慧刘伟张晋源
黄朝慧,刘伟,张晋源
一种有效抑制阵列后方声源的心形指向性传声器阵列
黄朝慧1,刘伟2,张晋源1
(1. 重庆工业职业技术学院,车辆工程学院,重庆401120;2. 一汽-大众汽车有限公司成都分公司,四川成都610100)
基于心形指向性传声器的波束形成可以有效抑制阵列后方声源的干扰,提高前方声源的识别精度。以平面轮形传声器阵列为对象,借助MATLAB仿真计算,对阵列后方声源波束形成声源识别特性及其抑制方法进行研究。基于除自谱的互谱波束形成算法提出了含有传声器指向性的波束形成算法,对圆形和心形指向性传声器进行不同声源类型的波束形成仿真计算,并针对仿真结果显示出的不足,给出了既能保证阵列平面上最大声压贡献量的识别精度,又能降低旁瓣水平的幅值校正算法。试验结果证明了基于心形指向性传声器的波束形成可以有效抑制后方声源。
声源识别;波束形成;后方声源;抑制方法;心形指向性传声器
0 引言
如何降低汽车噪声已成为汽车行业人员亟待解决的问题,而对噪声源的识别是第一步。现有的声源识别技术中,波束形成声源识别技术具有测量速度快,计算效率高,成像范围大,中高频分辨率好,适宜中长距离测量,对稳态、瞬态及运动声源定位精度高等优点而受到了广泛应用[1-4]。波束形成声源识别技术采用传声器阵列来测量声信号,阵列布置形式分为一维线阵列、二维平面阵列和三维阵列。一维线阵列布置形式简单方便,但是无法全面地采集声场数据,且需假设声源为线性分布来进行数据后处理,这严重限制了其应用;二维平面阵列采集的声场数据较为全面,能够有效衰减阵列前方的干扰信号[5],识别效果较好,且其结构相对于三维阵列较为简单,因而应用较为广泛。
以往的研究采用的二维平面阵列基于圆形指向性传声器,其对阵列后方干扰信号的抑制能力差。理论上两个关于阵列平面对称的等强度声源的识别结果相同,即阵列后方声源会在阵列前方的声源计算平面上的对应投影位置处产生高强度的干扰“鬼影”声源,极大地降低了阵列前方目标声源的识别精度。为了有效抑制或消除后方声源的影响,GFai、Brüel&Kjær公司都推出了具有一定倾角的三维星形传声器阵列[5],杨洋等给出了具有一定倾角的三维星形传声器阵列的改进方法[6]。上述方案可以有效抑制后方声源的干扰,但是都需要改变阵列布置,实际上把二维平面阵列改为了三维阵列,操作较为复杂。
本文以平面轮形传声器阵列为对象,借助MATLAB软件对阵列后方声源波束形成声源识别特性及其抑制方法进行研究。基于除自谱的互谱波束形成理论,提出了含有传声器指向性的波束形成算法,对圆形和心形指向性传声器进行不同声源类型的波束形成仿真,对仿真结果进行了对比分析,给出了改进算法,并进行了相关的试验。
1 基于心形指向性传声器的波束形成声源识别
1.1 含有传声器指向性的波束形成理论
波束形成声源识别方法离散化声源平面形成网格聚焦点,将阵列中各个传声器采集的声信号对各个聚焦点分别进行相位补偿并求和,从而识别声源。图1为基于球面波假设的波束形成声源识别原理示意图,除自谱的互谱波束形成输出为[7]

当声信号以不同的角度传播至传声器振膜时,振膜受到的作用力不同,经过声-电转化后输出的电信号也不同,这种传声器灵敏度随着声信号入射方向的不同而发生变化的特性即为传声器的指向性。传声器指向性可用角指向率()来表示,()是指与传声器主轴呈角度入射的平面波产生的灵敏度与参考方向(0°)的灵敏度之比。传声器指向性类别主要分为全向型(圆形)、双向型(“8”字形)和单向型(心形、超心形、锐心形)等。以往的研究是基于圆形指向性传声器,其对各个入射方向的角指向率均为1,即对于所有入射方向的声信号都有相同的灵敏度,所以其组成的平面阵列的波束形成无法抑制后方声源的干扰;心形指向性传声器的角指向率表达式为



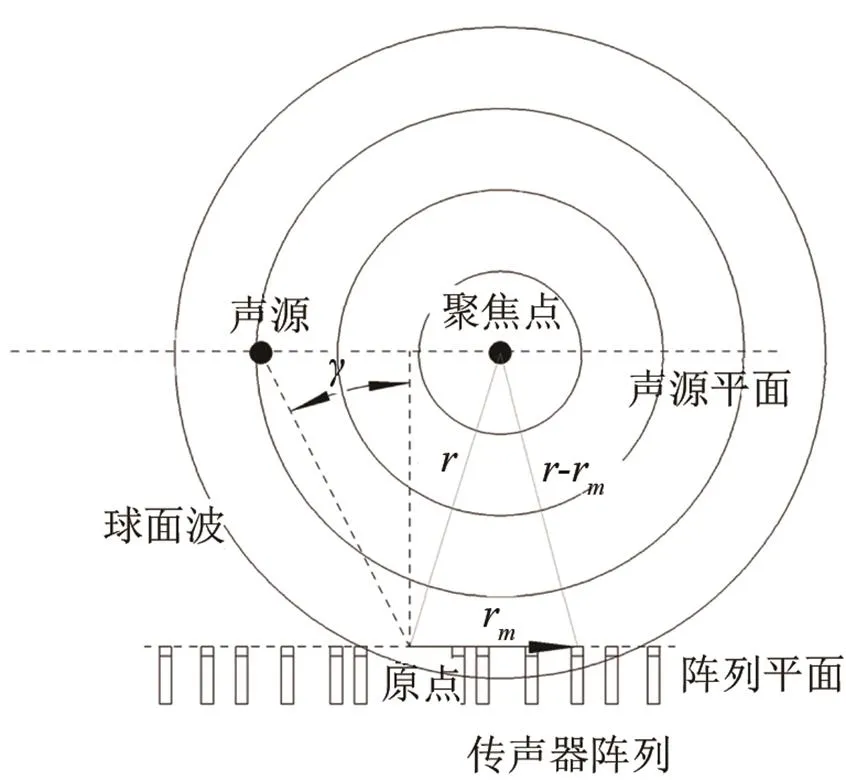
图1 基于球面波假设的波束形成原理图

图2 心形指向性极坐标图
1.2 仿真计算
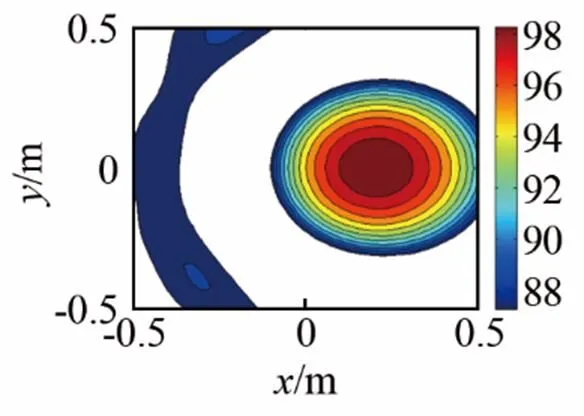
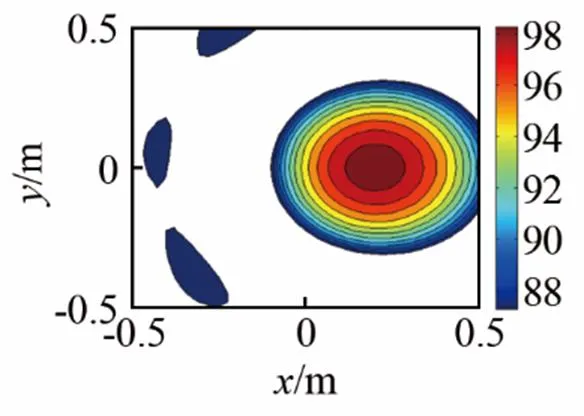
根据含有传声器指向性的波束形成理论,设计了相应的声源识别算法,并进行了仿真计算。仿真基于孔径为1 m、传声器数目为42的轮形传声器阵列。首先,将阵列正前方1 m处1 m×1 m的声源平面区域划分为41×41的等间距网格聚焦点。假设有一点声源,根据球面波传播原理计算得到传播至阵列各传声器的声信号,将这些信号分别乘以相应传声器与声源连线和传声器0°方向之间的夹角所对应的角指向率,即可得到各个传声器测得的声信号,然后进行互谱运算并除去自谱元素,再对各个网格聚焦点进行相位补偿并求和,将各个聚焦点的计算结果转化为功率级进行成像。图3~5是假定点声源声压幅值为2 Pa(1 m远声压分贝值为100 dB),频率为1 000、3 000、6 000 Hz,动态范围为12 dB时,圆形和心形指向性传声器波束形成仿真结果,因为圆形指向性传声器阵列对于前方和后方声源的识别效果是相同的,所以只对其位于(0.2, 0, 1) m的前方声源条件下进行仿真,而心形指向性传声器阵列的前方和后方声源的识别效果不同,所以对声源位于阵列前方(0.2, 0, 1) m和阵列后方(0.2, 0,-1) m分别进行仿真。
由图3~5的仿真结果可知:圆形指向性传声器波束形成可以准确识别前方单声源的位置和后方单声源关于阵列平面对称的位置,其主瓣峰值相同,表明圆形指向性传声器波束形成对后方声源无抑制能力;同样的声源条件下,心形指向性传声器波束形成可以准确识别前方单声源的位置和后方单声源关于阵列平面对称的位置,而前方和后方单声源主瓣峰值的差值约为28.0 dB,表明心形指向性传声器波束形成可以有效抑制后方声源;因而在前后方声源条件下,圆形指向性传声器波束形成输出两个主瓣,而心形指向性传声器波束形成仅在前方声源的位置输出了一个主瓣。
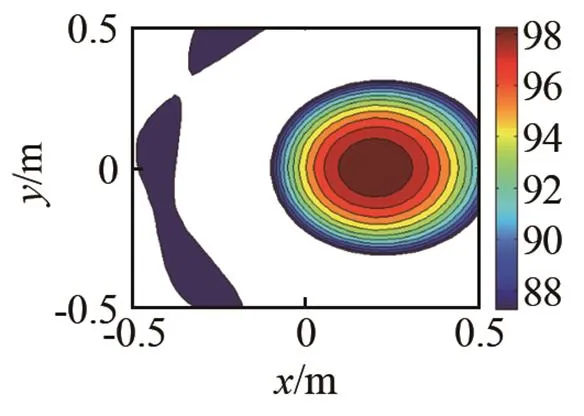
(a) 1 000 Hz MSL=88.152 dB (b) 3 000 Hz MSL=89.666 dB (c) 6 000 Hz MSL=89.440 dB
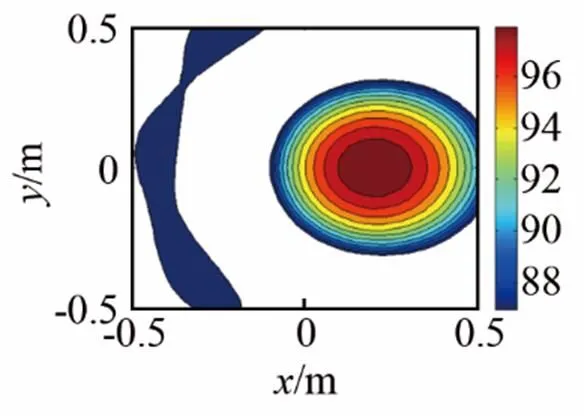
(a) 1 000 Hz MSL=87.871 dB (b) 3 000 Hz MSL=89.334 dB (c) 6 000 Hz MSL=89.124 dB
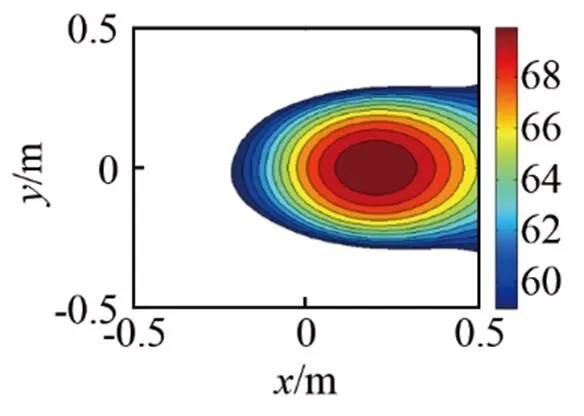
(a) 1 000 Hz (b) 3 000 Hz MSL=63.129 dB (c) 6 000 Hz MSL=65.500 dB
图6所示是频率均为3 000 Hz的两不相干声源条件下、动态范围为12 dB时,圆形和心形指向性传声器波束形成仿真结果,其中前方声源位于(0.2, 0, 1) m,后方声源位于(-0.2, 0,-1) m。图中,圆形指向性传声器识别出两个声源,而心形指向性传声器仅识别出前方声源,结果进一步表明圆形指向性传声器波束形成无法抑制背后声源,而心形指向性传声器波束形成可以有效抑制背后声源,提高前方声源的识别精度。
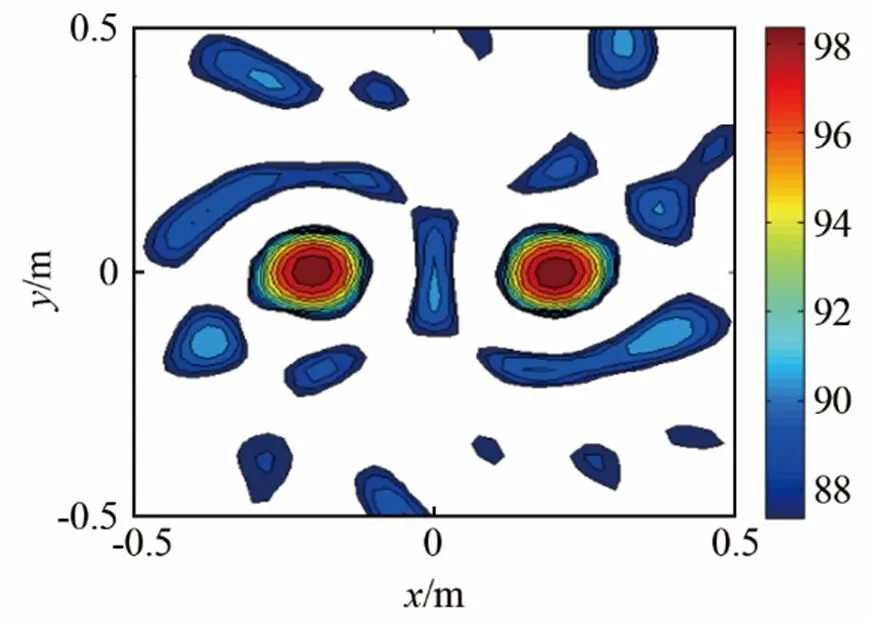
(a) 圆形指向性传声器
(b) 心形指向性传声器
图6 前后方声源,波束形成仿真结果
Fig.6 Beamforming simulations for the front and the back sources
对更普遍的情况进行仿真计算,其它条件不变。假定声源位置坐标的值恒为0,值为±1 m,将值在[-1.8, 1.8] m的范围内按照特定步长变化,声源和原点的连线与阵列轴线的夹角随之发生变化,图7为圆形和心形指向性传声器波束形成输出主瓣峰值随角的变化关系极坐标图。为了便于观察和比较,分别给出了前方单声源条件下,圆形和心形指向性传声器波束形成主瓣峰值的差值随角的变化关系曲线(图8(a)),以及后方单声源条件下,圆形和心形指向性传声器波束形成主瓣峰值的差值随角的变化关系曲线(图8(b))。由图7和图8可知:对于前方单声源,在传统的识别张角[-30°, 30°]范围内,圆形和心形指向性传声器波束形成输出的主瓣峰值的差值在[0.2, 0.8] dB范围内,说明心形指向性传声器波束形成对阵列平面上最大声压贡献量的计算精度略小于圆形指向性传声器;对于后方单声源,在[120°,240°]范围内,圆形与心形指向性传声器波束形成输出主瓣峰值的差值在[12,30] dB范围内,进一步表明心形指向性传声器波束形成可以有效抑制后方声源。反之亦表明,在保证至少12 dB的抑制能力时,阵列背后声源抑制的有效张角范围为[120°,240°]。
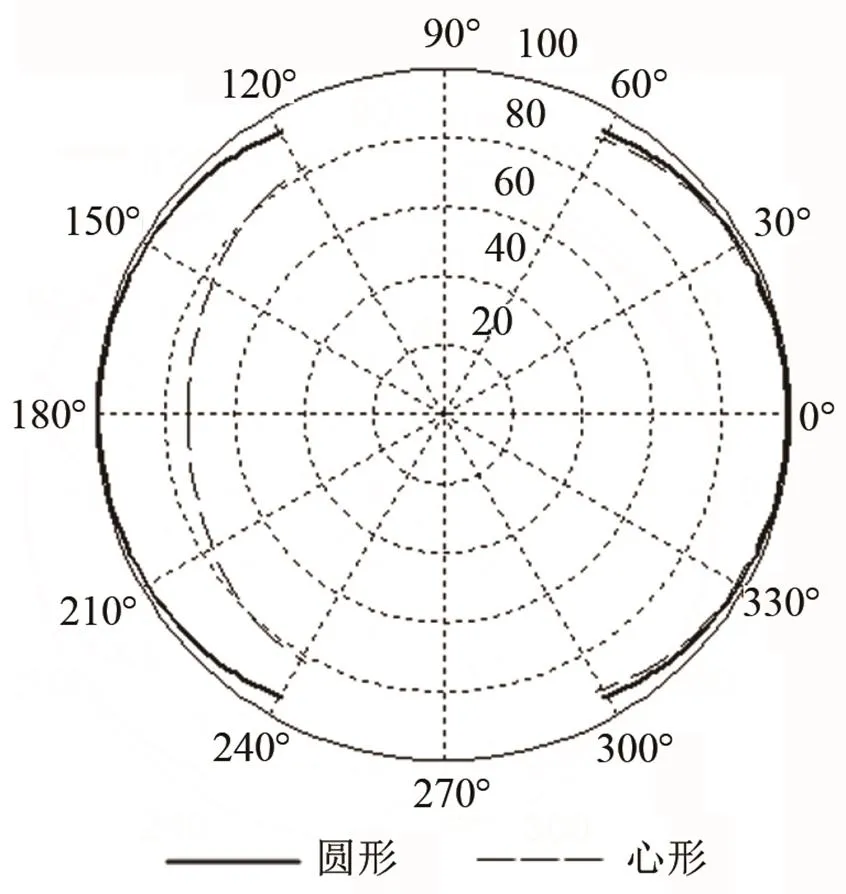
图7 圆形和心形指向性传声器波束形成主瓣峰值随γ角的变化图
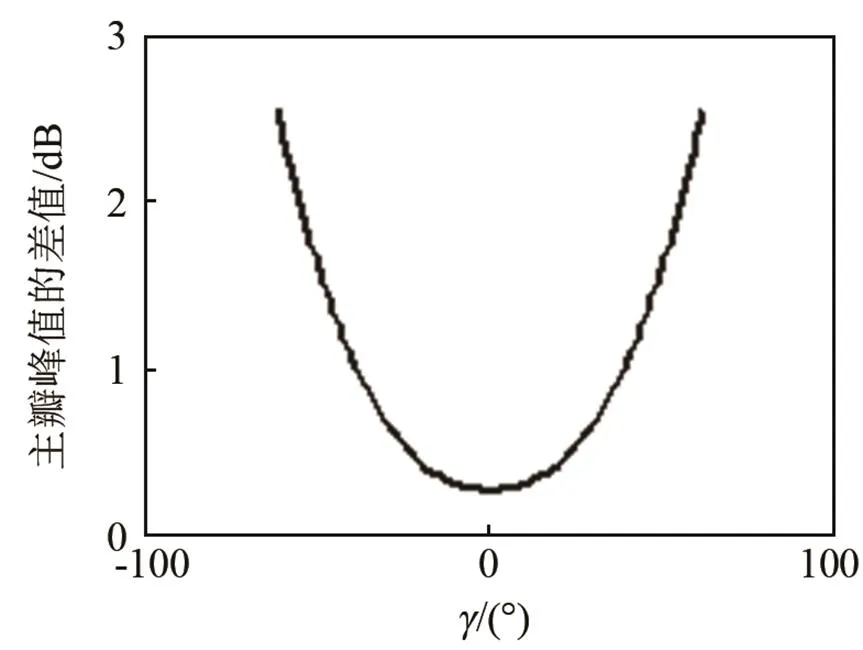
(a) 前方单声源
(b) 后方单声源
图8 圆形和心形指向性传声器波束形成主瓣峰值的差值随角的变化
Fig.8 Difference between the mainlobe peaks output by the round and the heart-shaped directional microphone arrays vs. the angle
1.3 幅值校正算法
1.2节表明心形指向性传声器波束形成可以有效抑制后方声源,但是对阵列平面上最大声压贡献量的计算精度不及圆形指向性传声器,针对这一问题给出了一种幅值校正算法:在对各个聚焦点进行反向聚焦时,在进行相位补偿的同时,将各传声器接收的声信号按对应的来波方向角进行相应的幅值校正。除自谱的互谱波束形成输出幅值校正如式(5)所示[7]:

当前方声源位于(0.2, 0, 1) m时,含有幅值校正的心形指向性传声器波束形成仿真结果如图9所示,对比图3~4中相同条件下波束形成仿真结果可知:同一频率下,阵列平面上最大声压贡献量的计算精度与图3圆形指向性传声器相同;但是最大旁瓣水平(Maximum Srclelobe Level,MSL)比如图4所示校正前分别增大1.137、1.165、1.021 dB。综合心形和圆形指向性传声器各自的优点,给出进一步的改进方法:首先基于心形指向性传声器阵列对各个聚焦点进行含有传声器指向性的波束形成仿真计算,其次在计算结果中找到最大值及其对应的位置,然后单独对该最大值点进行幅值校正,即可得到较小的旁瓣水平。同样仿真条件下,含最大点幅值校正的心形指向性传声器波束形成仿真结果如图10所示,对比图3中相同条件下波束形成仿真结果可知:阵列平面上最大声压贡献量的计算精度与图3圆形指向性传声器相同,且最大旁瓣水平相比图3减小了0.281、0.332和0.316 dB,增大了有效动态范围。
2 试验
如图11所示的伪随机阵列,分别采用圆形指向性传声器和心型传声器进行声源识别试验。实验时前方扬声器位于(-0.1, 0, 0.35) m,后方扬声器位于(0.1, 0,-0.35) m,对4 000 Hz频率下的试验数据进行计算,图12~图13为显示动态范围为10 dB时,不同声源、不同指向性声源的计算结果。图12为采用圆形指向性传声器的声源识别结果,图13为采用心形指向性传声器的声源识别结果,且图12(a)、图13(a)对应于只有阵列前方声源发声的声源识别结果,图12(b)、图13(b)对应于只有阵列后方声源发声的声源识别结果,图12(c)、图13(c)对应于阵列前方声源和后方声源同时发声的声源识别结果。从图12可见,对应于真实的前方声源位置和后方声源关于阵列平面的镜像对称位置处出现了相应的声学中心,即将阵列后方的声源错误地成像到阵列前方,未能对阵列后方的声源起到抑制作用。从图13(a)可见,采用心型传声器的阵列能有效地识别阵列前方的声源位置,且相比于如图12(a)所示的圆形指向性传声器的阵列成像结果而言其成像结果几乎没有发生变化。对比图12(b)、图13(b)可知,对于阵列后方的声源,采用心形传声器的阵列相比于采用圆形传声器的阵列而言,声学成像结果中的主瓣峰值下降了28.765 dB,表明阵列后方声源在采用心形传声器时能够得到有效抑制。此外,对比12(c)和13(c)进一步可知,相比于采用圆形指向性传声器的阵列,采用心形指向性传声器的阵列在准确识别阵列前方声源的同时能够有效地抑制阵列后方声源,即降低了平面传声器阵列后方声源对前方声源的干扰,提高了对前方声源的识别精度,极大地提高了平面传声器阵列的声源识别应用场合。
(a) 1 000 Hz MSL=89.007 dB (b) 3 000 Hz MSL=90.499 dB (c) 6 000Hz MSL=90.144 dB
(a) 1 000 Hz MSL=87.871 dB (b) 3 000 Hz MSL=89.334 dB (c) 6 000 Hz MSL=89.124 dB
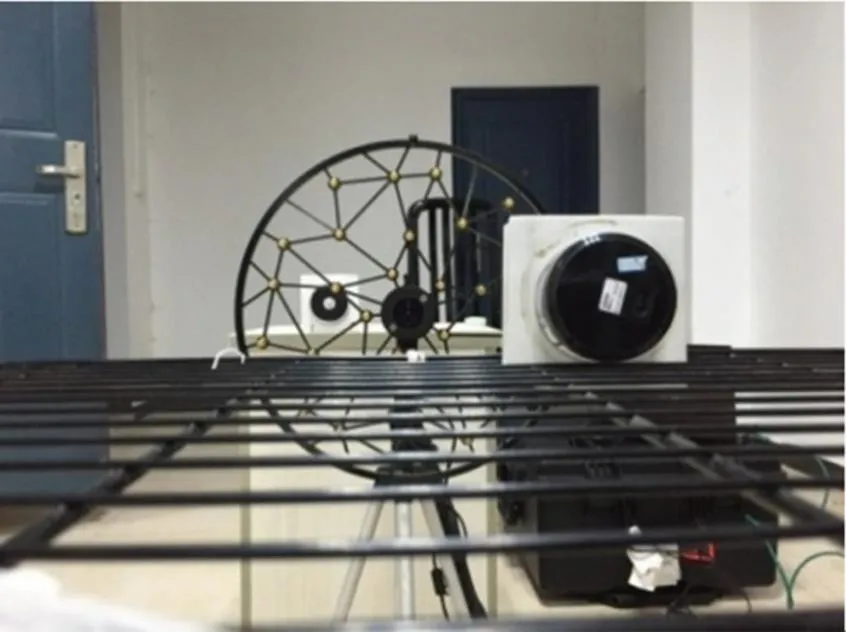
图11 阵列及其试验现场
3 结论
基于除自谱的互谱波束形成声源识别理论,提出了含有传声器指向性的波束形成算法,并对采用圆形和心形指向性传声器的传声器阵列,在不同声源类型条件下进行了仿真计算和实验验证。取得的主要结论如下:
(1) 基于圆形指向性传声器的平面阵列波束形成对阵列后方声源无抑制能力,基于心形指向性传声器的平面阵列波束形成则可以有效降低后方声源的旁瓣干扰,但降低了阵列平面上最大声压贡献量的识别精度;
(2) 采用幅值校正算法能有效提高心形指向性传声器阵列波束形成的最大声压贡献量计算精度,且有效降低旁瓣水平。
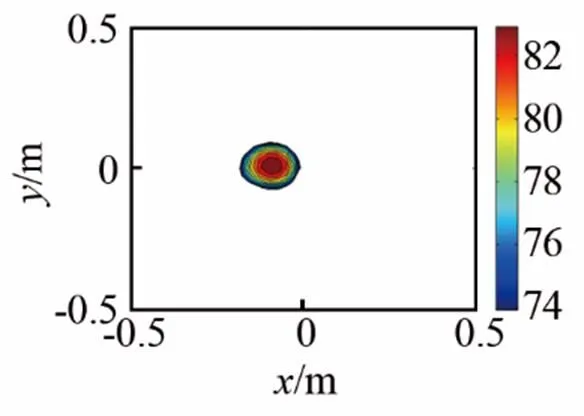
(a) 前方单声源 最大值84.042 dB (b) 后方单声源 最大值81.468 dB (c) 前后方声源
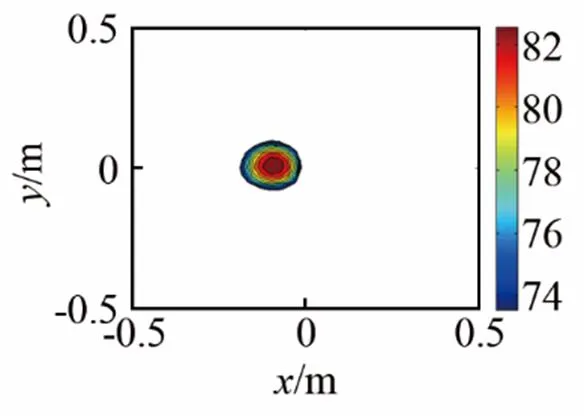
(a) 前方单声源 最大值83.898 dB (b) 后方单声源 最大值52.703 dB (c) 前后方声源
[1] 王子腾, 杨殿阁, 李兵, 等. 运动汽车噪声的可视化测量方法比较研究[J]. 振动工程学报, 2011, 24(5): 578-584. WANG Ziteng, YANG Diange, LI Bing, et al. Comparative study of methods for moving vehicles noise measurement and visualization[J]. Journal of Vibration Engineering, 2011, 24(5): 578-584.
[2] Mehdi Batel, Marc Marroquin. Noise source location techniques—simple to advanced applications[J]. Sound and Vibration, 2003, 37(3): 24-38.
[3] 杨洋, 倪计民, 褚志刚, 等. 基于互谱成像函数波束形成的发动机噪声源识别[J]. 内燃机工程, 2012, 33(3): 82-87. YANG Yang, NI Jimin, CHU Zhigang, et al. Noise Source Identification of an Engine Based on Cross-spectra Imaging Function Beamforming[J]. Chinese Internal Combustion Engine Engineering, 2012, 33(3): 82-87.
[4] Yardibi T, Bahr C, Zawodny N, et al. Uncertainty analysis of the standard delay-and-sum beamformer and array calibration [J]. Journal of Sound and Vibration, 2010, 329(13): 2654-2682.
[5] 褚志刚, 杨洋, 倪计民, 等. 波束形成声源识别技术研究进展[J]. 声学技术, 2013, 32(5): 430-435. CHU Zhigang, YANG Yang, NI Jimin, et al. Review of beamforming based sound source identification techniques [J]. Technical Acoustics, 2013, 32(5): 430-435.
[6] 杨洋, 褚志刚. 波束形成三维传声器阵列声源识别的改进方法[J]. 声学技术, 2013, 32(4): 336-341. YANG Yang, CHU Zhigang. Improvement of the sound source identification method based onbeamforming of three-dimensional array[J]. Technical Acoustics, 2013, 32(4): 336- 341.
[7] Christensen J J, Hald J. Beamforming[R]. B&K Technical Review, 2004: 1-31.
[8] 马大猷, 沈壕. 声学手册[M]. 北京: 科学出版社, 2004. MA Dayou, SHEN Hao. Acoustic manual [M]. Beijing: Science Press, 2004.
A heart-shaped directional microphone array for suppressing noise behind array
HUANG Chao-hui1, LIU Wei2, ZHANG Jin-yuan1
(1. Faculty of Vehicle Engineering, Chongqing Industry Polytechnic College, Chongqing 401120, China;2. The FAW-VW Automobile Company Ltd, Chengdu 610100, Sichuan, China)
Based on heart-shaped directional microphone, the beamforming method can suppress the noise behind arrays and make the precision of sound source identification much better. A planar wheel microphone array is taken as research target, and the beamforming performance for noise behind microphone array and the noise suppression methods are analyzed with MATLAB simulation. Based on the auto-spectrum removal algorithm, the algorithm containing microphone directivity is proposed. The beamforming based on round and heart-shaped directional microphones for different types of sound sourcesare simulated. To solve the deficiency, the amplitude correction algorithm of the maximum point, which not only ensures the accuracy of maximum sound pressure contribution on the array plane, but also reduces the side lobe level, is proposed. Finally, the experiment indicates that the heart-shaped directional microphone array can suppress the noise behind arrays.
acoustic source identification; beamforming; noise behind microphone array; suppression method; heart- shaped directional microphone
TB52
A
1000-3630(2017)-01-0081-07
10.16300/j.cnki.1000-3630.2017.01.015
2016-06-15;
2016-08-24
黄朝慧(1968-), 女, 重庆涪陵人, 副教授, 研究方向为汽车电子技术和汽车运用工程。
黄朝慧, E-mail: 760848577@qq.com。
