基于人工神经网络的太阳能电池片表面质量检测系统
2017-10-24伍李春刘明周蒋倩男葛茂根
伍李春, 刘明周, 蒋倩男, 葛茂根, 凌 琳
(合肥工业大学 机械工程学院,安徽 合肥 230009)
基于人工神经网络的太阳能电池片表面质量检测系统
伍李春, 刘明周, 蒋倩男, 葛茂根, 凌 琳
(合肥工业大学 机械工程学院,安徽 合肥 230009)
针对依赖人工进行太阳能电池片表面质量检测时效率和精度低的问题,文章提出了基于机器视觉以及人工神经网络的太阳能电池片表面质量检测方法。将表面缺陷分为外形缺陷、颜色缺陷、裂纹以及丝印线路缺陷4类,基于模板匹配检测外形缺陷,基于HIS空间下的颜色直方图检测颜色缺陷;针对细微性缺陷容易受噪声影响的特点,利用2类人工神经网络进行断栅检测,并对这2类神经网络进行比较。大量实验结果验证了上述方法能够准确、快速地检测出太阳能电池片表面缺陷。
缺陷检测;机器视觉;人工神经网络;正则化径向基函数(RBF)网络;学习向量化(LVQ)网络
随着化石能源逐渐走向衰竭,太阳能作为一种清洁能源得到了飞速发展,同时,硅太阳能电池片的产量也迅速增长。太阳能电池片的表面质量不仅影响其自身的发电效率和可用寿命,而且表面缺陷还会造成太阳能模块在后续使用中的电气故障[1]。因此,在太阳能电池片制造过程中,其表面质量的检测显得尤为重要。
目前,绝大多数的太阳能电池生产厂家仍依赖电子显微镜进行视觉判断[2]。人工视觉检测属于接触性检测,不仅在检测的过程中带来二次损伤,同时也会由于疲劳、经验等引起人为误差,降低检测的精度[3]。基于机器视觉的缺陷检测具有以下特点:① 能够自动控制检测过程;② 检测的速度快、精度高;③ 具有非接触的特点。因此,太阳能电池片缺陷检测更适合采用基于机器视觉的自动检测方式。
文献[2]通过拟合直线和圆进行外形尺寸测量和外形破损检测,并采用多模板匹配和差影法实现丝印缺陷检测;但该方法的检测效率较低,且只能判断缺陷的有无,不能对缺陷进行分类。文献[4]提出了基于鲁棒主成分分析(robust principle component analysis,RPCA)的太阳能电池片表面缺陷检测方法,将图像矩阵进行变换,使之分解成无缺陷的低秩矩阵图像和有缺陷的稀疏矩阵图像,通过凸优化的方法求出最优解,进而判断太阳能电池片是否存在缺陷;该方法能够准确地检测出裂纹缺陷以及缺角缺陷,但不能准确地检测出丝印缺陷。文献[5]提出了基于深度学习的太阳能电池片表面缺陷检测方法,首先根据样本特征建立深度置信网络(deep belief network,DBN),并通过网络训练以及反向传播 (back propagation,BP)算法获取网络参数,得到训练样本到无缺陷模板之间的映射关系,然后利用重构图像与缺陷图像之间的对比关系,实现测试样本的缺陷检测;应用该方法对低像素图片进行检测,可以得到较优的检测结果,且检测速度较快,但在实际应用中,因为细微型缺陷在高精度相机下才能显现出来,所以待检测的图片一般都为百万像素级,这对DBN的网络训练形成很大挑战。
基于上述检测方法的缺陷和不足,本文提出了一种基于人工神经网络的太阳能电池片表面缺陷检测方法;该方法不仅能够从低像素图片中检测出一般缺陷并对缺陷进行分类,而且能够快速地处理高像素图片并进行细微型缺陷检测。
1 太阳能电池片表面缺陷的种类
依据太阳能电池片表面缺陷的特点[6],同时便于检测算法的设计,本文将表面缺陷分为外形缺陷、颜色缺陷、裂纹以及丝印线路缺陷4类。其中,外形缺陷表现为电池片的外形尺寸或特征与标准电池片存在差异,包含表面弯曲、外形破损等;颜色缺陷表现为电池片的主体颜色偏离蓝色、深蓝色或电池片上有明显的脏污痕迹或颜色突变区域,包含色差、表面脏污、斑点、漏浆等;裂纹是指在电池片上有1个或1个以上的裂纹、裂痕;丝印线路缺陷表现为电池片的栅线或电极线存在部分缺失或偏离正确位置,包含断栅、栅线变厚、变薄。常见缺陷的具体形态如图1所示。
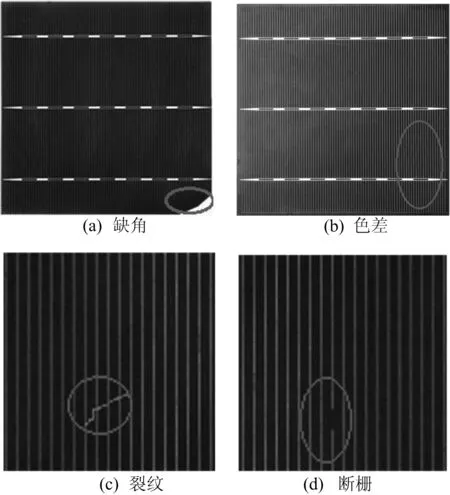
图1 常见的多晶硅太阳能电池片表面缺陷
2 基于机器视觉的缺陷检测
本文依据不同类型表面缺陷的特征,选择不同精度的相机并设计适合该类型缺陷的检测算法。首先,由低精度相机获取一张太阳能电池片的低像素图片,并判断该图片是否包含外形缺陷、颜色缺陷或裂纹缺陷;然后通过高精度相机获取该太阳能电池片的高像素图片,并检测该图片是否包含断栅缺陷。本文规定数字图像中太阳能电池片所在区域为目标区域,并将栅线定义为目标前景,将蓝色区域定义为目标背景。基于机器视觉的太阳能电池片表面质量检测算法流程如图2所示。
在图像获取、传输等过程中,常常由于噪声干扰使图片的质量变差[7]。因此,本文首先应用图像增强技术对原始图像进行预处理,运用平滑技术消减噪声,提高图像信噪比。但是图像的平滑过程会导致图像模糊,为了消除图像模糊,需要先将滤波结果经锐化后,再采用3×3模板进行平均值平滑处理。同时,为了方便图像处理算法的后续设计,还应运用图像分割技术从改善后的图像中提取目标。首先,基于直方图形状分析进行阈值检测;然后利用最优阈值化方法[8]分割太阳能电池板与黑色背景,得出只包含太阳能电池板的感兴趣区域(region of interest,ROI)。

2.1 外形缺陷检测
外形检测只关注太阳能电池片的边缘特征,这些特征可以由图像灰度的变化来表示,因此为了减少图像处理过程中的运算量,应先对分割后的图像作二值化处理。本文采用基于形状模板匹配的改进算法[9]进行外形检测。将待检测图像的ROI与标准模板配准,得到点的匹配分数;再将其与阈值分数比较,若匹配分数大于阈值分数,则判定产品外形合格,否则判定产品存在外形缺陷。
2.2 颜色缺陷以及裂纹缺陷检测
HIS颜色空间与人的视觉系统保持一致,而且对颜色的描述比RGB要简单,因此本文基于目标背景的HIS空间颜色特征进行颜色检测。
首先,将无缺陷的样本图像进行二值化处理,通过阈值分割提取目标前景,并将图像的ROI和目标前景配准后进行减影操作,进而得到只包含目标背景(即太阳能电池片的蓝色区域)的RGB图,该处理过程的局部放大图如图3所示。

图3 减影操作处理结果的局部放大图
然后,将大量无缺陷的太阳能电池片的目标背景图转换到HIS颜色空间,得到蓝色区域的H、I、S值,并依据颜色直方图确定每一个分量的阈值,H、I、S的阈值范围见表1所列;最终,将待检测图像的目标背景的RGB图转换到HIS颜色空间下,并对每个像素点进行搜索,若像素点的H、I、S值均在阈值范围内,则该点为有效点,并将有效点占总像素点的百分比与阈值比较,判断是否存在颜色缺陷。而裂纹缺陷检测,只需将目标背景的RGB图进行阈值分割即可直接获取裂纹区域。

表1 太阳能电板目标背景颜色阈值范围
2.3 断栅检测
由太阳能电池片的图像(图1)可知,断栅在图像上表现为栅线不连续,且栅线的灰度值较高,断开区域的灰度值较低。因此在图像上可以从栅线的上端向下端扫描,若某点的灰度值小于设定的阈值,则该点为缺陷点;若与该点相邻的缺陷点数量大于设定的缺陷点的最低数量,则认为是断栅缺陷。
图像信号在产生、传输和记录过程中,经常会受到各种噪声的干扰,在图像上呈现出黑白杂点,白点为高灰度噪声,黑点属于低灰度噪声。当噪声点落到栅线位置时,仅依靠上述方法进行断栅缺陷检测,容易将黑色噪声点误识别为断栅。本文应用正则化径向基函数(radial basis function,RBF)网络和学习向量化(learning vector quantization,LVQ)网络2类人工神经网络来剔除错分点,提高检测结果的准确率。
(1) 正则化RBF网络。RBF网络具有N个输入节点,P个隐节点,l个输出节点;网络的隐节点数等于输入样本数,将所有输入样本设为RBF的中心,各RBF取统一的拓展常数。正则化RBF网络结构如图4所示。

图4 正则化RBF网络结构
图4中,X=[x1x2…xN]T为输入向量;φj(X)(j=1,2,…,P)为任一隐节点的激活函数,称为“基函数”,一般选用Gauss函数;W为输入权值矩阵,其中wjk(j=1,2,…,P;k=1,2,…,l)为隐层第j个节点与输出层第k个节点间的突触权值;Y=[y1y2…yl]T为网络输出;输出层神经元采用线性激活函数。
(2) LVQ网络。LVQ网络的结构如图5所示,由输入层、竞争层和输出层神经元组成。
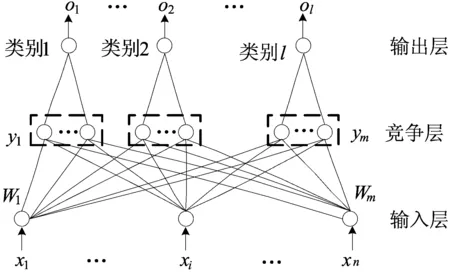
图5 LVQ网络
输入层有n个神经元接受输入向量,与竞争层之间完全连接;竞争层有m个神经元,分为若干组并呈一维线阵排列;输出层每个神经元只与竞争层中的一组神经元连接,连接权值固定为1。在LVQ网络的训练过程中,输入层和竞争层之间的权值被逐渐调整为聚类中心。
(3) 断栅缺陷图像的特征提取。断栅与黑色噪声点如图6所示。
通过比较断栅与黑色噪声点的图像特征可知,断开区域为蓝色区域,其灰度值大于黑色噪声点的灰度值,小于栅线的灰度值。因此,断栅区域与黑色噪声点区域的灰度特征不同,且该类特征向量可作为神经网络的输入向量。

图6 断栅与黑色噪声点
缺陷区域像素点集合用Ω表示,计算以下4个参数,具体如下:
(1)
(2)
R=max(zi)-min(zi)
(3)
(4)
其中,μ、δ2、R、e分别为点集Ω中像素点灰度的均值、方差、极值、熵;n为点集Ω中像素点的个数;zi为每个像素点的灰度;p(zi)为灰度zi在点集Ω中的概率。
将这4个参数作为缺陷区域的特征向量,并将其输入到BPN和LVQ网络学习,进而判断该缺陷区域是否为断栅区域。
3 缺陷检测的实现
该缺陷检测系统运行在C#平台上,包括CCD彩色相机(低精度相机:DH MER-030-120UM/UC 1/4“656×492;高精度相机:DH Manta G-609 1” Sony ICX694 2752×2206)、光源(DH LER2-90SW2)、PC机(OS:Windows 7 64 bit;CPU:Intel Core i5-3337U;RAM: 6 GB) 3个基本硬件。在缺陷自动检测之前,应由有经验的工人对每张太阳能电池片进行检测,并将人工检测结果作为正确结果用于系统验证。
为了验证本文算法的正确性,首先选取一批废品率较高的600幅像素为656×492的太阳能电池片图像,其中包含外形缺陷、颜色缺陷以及裂纹缺陷的图像各200幅。
外形、颜色以及裂纹缺陷的检测结果见表2所列。

表2 外形、颜色以及裂纹缺陷检测结果
600张图像检测所需时间为43.57 s,平均每张检测时间为0.072 6 s。通过应用RBF和LVQ网络判断高像素图片中是否包含断栅缺陷,并对这2类神经网络的实验结果进行比较。
在进行实验验证之前,需要对2类神经网络进行网络训练,选取400幅高像素图片(200幅只包含断栅缺陷,200幅只包含黑色噪声点)作为训练样本。为检验2类神经网络的识别效果,再选取600个样本作为测试集(人工检测结果为400幅只包含断栅缺陷,200幅只包含黑色噪声点)。
(1) 正则化RBF的网络训练与参数选择。由于点集Ω有4个特征参数,故输入层节点数应为4;输出层节点数选为2,对应类别编码为(1,0)和(0,1)。计算机程序用Matlab编写,用Solverb函数训练网络,输出结果的判定阈值设为0.5。通过多次训练比较,可以得出目标误差为0.01且RBF的分布常数(speed constant,SC)为5时正确识别率可以达到最大值98.57%,对应的均方根误差最低,值为0.257 9。因此,选定目标误差为0.01,SC为5。
(2) LVQ的网络设计与网络训练。
输入层设计:与正则化RBF相同,样本输入维数为4。
竞争层设计:在竞争层中所需的神经元数与训练样本的类别数及训练样本数有关。由于输出结果分为2类,故在竞争层神经元必须大于2个,否则不能正常识别。同时训练样本数为400个,故在竞争层神经元数不宜多于400个,原因在于竞争层神经元过多,不仅影响网络的训练速度,而且易产生“死”神经。此处节点数设计为40个。
输出层设计:由于输出结果分为2类,将输出层节点数设为2。
W的权值由计算机随机产生一个2行40列的矩阵。W根据上述LVQ网络学习算法进行修正,直到400个训练样本全部正确划分。
最后,将测试集中600个样本输入到设计好的2类神经网络分类器中进行测试。正则化RBF分类器和LVQ分类器的比较结果见表3所列。由表3可知,正则化RBF分类器需要花费较长的计算时间,但其具有较好的识别效果。

表3 正则化RBF分类器和LVQ分类器的测试结果比较
本文方法与基于RPCA的检测方法和基于深度学习的检测方法的对比结果如下:
(1) 基于RPCA的检测方法,平均每张图片的检测时间为2.21 s,计算速度低于本文方法(平均每张检测时间最长为0.179 6 s)。而改进的RPCA通过降低低秩矩阵图像清晰度,使得平均每张检测时间减低为0.2 s,其计算速度仍低于本文方法。
(2) 基于深度学习的太阳能电池片表面缺陷检测方法,平均每张图片的检测时间为0.151 s,其计算速度高于本文方法。但是该检测方法的检测对象是低像素图片,利用该方法可以检测出低像素图片的外形缺陷、颜色缺陷以及裂纹缺陷,而细微型缺陷在高像素的图片中才能显现出来,因此针对断栅等细微型缺陷该方法不具有较好的检测效果。本文方法能够较快地检测出太阳能电池片表面的细微缺陷,利用LVQ神经网络进行检测时,平均每张图片的计算时间为0.083 s;利用RBF神经网络进行检测时,平均每张图片的计算时间为0.107 s。
4 结 论
从检测太阳能电池片表面缺陷的实验可知,在对低像素图片进行外形缺陷检测、颜色缺陷检测以及裂纹缺陷检测时,本文方法不仅具有较高的准确率,而且具有较快的计算速度。针对断栅这一细微型缺陷,本文通过训练正则化RBF和LVQ 2类分类器来检测高像素图像中是否包含该缺陷。正则化RBF分类器的正确识别率能够达到98.57%,计算时间为0.107 s;LVQ分类器的正确识别率能够达到92.85%,计算时间为0.083 s。基于RBF神经网络检测方法花费的时间较长,但其具有较好的检测效果,因此,本文将正则化RBF分类器用于缺陷检测系统中。
本文提出了一种基于机器视觉以及人工神经网络的太阳能电池片检测系统,能够实现制造过程中太阳能电池片常见表面缺陷的检测,降低了相关的人力成本、增加了检测的可靠性和速度。该系统依靠上述检测算法流程不仅可以准确地识别出一般缺陷并对缺陷进行分类,而且能够较好地检测出断栅等细微型缺陷。为了使该系统在工厂中被更广泛地应用,在对太阳能电池片的表面缺陷检测研究的基础上,还应对太阳能电池片的电致发光图像识别进行深入研究,进而识别出电池片的隐裂、黑心等内部缺陷,并将内部缺陷检测功能加到该系统中,不断完善该系统的功能。
[1] TSAI D M,CHANG C C,CHAO S M.Micro-crack inspection in heterogeneously textured solar wafers using anisotropic diffusion[J].Image and Vision Computing,2010,28(3):491-501.
[2] 张舞杰,李迪,叶峰.硅太阳能电池视觉检测方法研究[J].计算机应用,2010,30(1):249-252.
[3] SUN T H,TIEN F C,TIEN F C,et al.Automated thermal fuse inspection using machine vision and artificial neural networks[J].Journal of Intelligent Manufacturing,2016,27(3):639-651.
[4] 姚明海,李洁,王宪保.基于RPCA的太阳能电池片表面缺陷检测[J].计算机学报,2013,36(9):1943-1952.
[5] 王宪保,李洁,姚明海,等.基于深度学习的太阳能电池片表面缺陷检测方法[J].模式识别与人工智能,2014,27(6):517-523.
[6] 桑野幸德.太阳电池及其应用[M].钟伯强,马英仁,译.北京:科学出版社,1990.
[7] SONCA M,HLAVAC V,BOYLE R.图像处理、分析与机器视觉[M].艾海舟,苏延超,译.3版.北京:清华大学出版社,2011.
[8] GONZALEZ R C,WOODS R E..Digital image processing [M].2nd.Boston: Addison-Wesley Longman Publishing Co.Inc.,2010.
[9] 张代林,陈文广,谢经明,等.基于形状模板匹配的印刷品缺陷检测[J].机械与电子,2013(12):40-43.
Solarcellsurfacequalitydetectionsystembasedonartificialneuralnetwork
WU Lichun, LIU Mingzhou, JIANG Qiannan, GE Maogen, LING Lin
(School of Mechanical Engineering, Hefei University of Technology, Hefei 230009, China)
For the low efficiency and precision problem of solar cell surface test relying on manual labor, a method of the solar cell surface detection based on machine vision and artificial neural network is raised. Surface defects are firstly divided into four categories, including appearance defects, color defects, cracks and defects of screen printing line. Then the appearance defects are detected based on template matching and the color detection is realized according to the image of color histogram on HIS space. Finally, for the characteristics of small defects which are easily affected by noise, two types of artificial neural networks are used to detect the broken gate and the two networks are compared. The experimental results show that the presented method can accurately and quickly detect the solar cell surface defects.
defect detection; machine vision; artificial neural network; regularized radial basis function(RBF) network; learning vector quantization(LVQ) network
2016-06-20;
2016-08-29
安徽省科技攻关计划资助项目(1604a0902182)
伍李春(1978-),男,安徽潜山人,合肥工业大学助理研究员;
刘明周(1968-),男,安徽六安人,博士,合肥工业大学教授,博士生导师.
10.3969/j.issn.1003-5060.2017.09.006
TP391
A
1003-5060(2017)09-1176-06
(责任编辑 胡亚敏)
