家具业喷漆机械手系统的设计与研究
2017-10-24杨茸刘金枝孔晨佳
杨茸,刘金枝,孔晨佳
(湖南工程学院机械工程学院,湖南 湘潭 411101)
家具业喷漆机械手系统的设计与研究
杨茸,刘金枝,孔晨佳
(湖南工程学院机械工程学院,湖南 湘潭 411101)
在家具行业实现喷漆自动化代替手工作业,可减少油漆中甲醛对工人身体的伤害,提高工作效率。本文依据模块化和组合设计系统原理,设计出一种多功能移动式喷漆机械手臂。首先对机械手臂选型和设计,然后针对外观进行优化,最后对机械臂移动的导轨选取并进行装配。同时对该机械手系统选取适合的控制系统,组合成家具业小型喷漆机械手臂模型。
机械手臂;外型优化;移动轨道;控制系统;装配
随着自动化技术的发展,机械手臂在制造业发展过程中发挥着极其重要的作用。自动化机械手臂因动作准确灵活,可靠性高的特点,被用来代替人工进行的简单、单一的劳动,一方面可以提高工作效率,节省人力;另一方面可以提高产品的加工精度,保证产品质量等优点。随着人口老龄化的出现与人力成本的大幅度提高,市场对机器人或者机械手臂需求也越来越强烈,特别是机械加工、焊接、热处理、上下料及毛坯制造等领域用得最为广泛。由于家具喷漆工艺较为复杂,基本都是人工喷漆作业,且喷漆的效率低下。
目前主导的喷漆自动化设备有:(1)喷漆往复机包括三轴,四轴,五轴,六轴,七轴机械手臂往复机。(2)自动分度往复喷漆机。(3)内壁自动喷漆机等几大类。而在大部分喷漆机械中,基本是以圆周方向为喷漆范围,或者短距离往复喷漆,但对于结构简单距离长的自动往复喷漆设备还非常欠缺,然而在家具喷漆行业中又需要较长距离的往复喷漆机,例如喷刷一张长茶几或者一根两米的木条等,市面上普通的自动往复喷漆机根本无法完成,所以这是一个亟待解决的一个问题。目前主流的自动喷漆机械都比较大型且价格昂贵,对于私营的小家具企业难以承受,于是通过对众多喷漆机械的结构分析,设计出了一款结构精细,占地面积小,研发成本较低的机械手臂喷漆系统。
1 设计思路
在家具行业中,需要进行喷漆的材料众多。很多中小型企业中还运用传统的手工刷漆和手持喷漆机进行喷漆,不仅要求工人的喷漆技术水平高,而且对人体的健康有很大的伤害。本文通过对当今市面上的机械手臂结构进行分析及创新设计,提出模块化和组合设计的方法对长距离往复喷漆机械手臂系统进行设计。这种设计方法是根据机械手臂系统的功能要求,尽量从贮存的标准件、通用件和其它可继承的结构和功能单元中选择。把喷漆机械手臂系统进行模块化拆分,该机械手臂系统可分成三个模块,第一个模块是机械手臂,第二个模块是带动机械手臂水平移动的导轨,第三个模块是机械手臂控制系统。通过组合设计选取其他机械喷漆机械手臂系统中可继承的结构,对本喷漆机械手臂系统进行设计与优化。
2 喷漆机械手臂
2.1 喷漆机械手臂三维模型
本文设计的三维模型图如图1所示,该结构为4自由度喷漆机械手臂与搭载机械手臂运动的滚珠丝杠直线导轨滑台组合而成。通过机械手臂和导轨之间的相互运动,完成整个范围内的覆盖作业。

图1 机械手臂系统三维模型
2.2 机械手臂的设计与优化
对于智能化的机械手臂,它的功能主要是根据其作业对象的工艺要求所决定的。目前市面上机械手臂的种类繁多,按照轴类来分可分为三轴和多轴等,以六轴的机械手臂运用最为广泛,按照自由度来分,可以分为三自由度、四自由度、五自由度等。本文中的机械手臂主要用于家具材料的喷漆,首先对机械手臂的框架结构进行选取,但由于家具行业中需要进行喷漆的材料大多是板面材料之类的,因此需要考虑以下到几点要求。(1)机械手臂可以旋转并且输出端可以伸缩自如。(2)控制精度高。(3)控制方式简单以及工作效率高等特点。通过对实际的使用情况和机械杆件机构的分析进行了设计,如图2。通过综合考虑,采用两臂三关节机械手臂,其主要由大臂、小臂、支撑部分及活动喷嘴部分组成,手臂自由度为四自由度比较实用,采用自由度较多的手臂使用起来也较为复杂,同时对于成本来说也会大幅度提升。
本文首先通过组合设计继承现有的机械手臂的结构,画出基本的框架图。并通过对喷漆的实际操作要求对机械手臂关节处进行分析。(1)第一关节:为水平移动关节,选用带有编码器的交流伺服电机驱动丝杠直线导轨,使机械手臂进行水平移动作业。移动位置可由程序任意设定,导轨的行程也可定制(标准2m,长度可由使用要求定制),丝杠直线导轨的限位和校零作用由导轨两端的电感式接近传感器进行控制。(2)第二关节:为机械手臂旋转关节,运用带有精密减速箱的进步伺服电机进行控制,在关节处采用专用传感器对极限位置进行校零和检测,手臂最大旋转角度为350°。(3)第三关节:为大臂摆动关节,运用带有精密减速箱的进步伺服电机进行控制,在关节处采用专用传感器对极限位置进行校零和检测,大臂最大旋转角度180°。(4)第四关节:为小臂摆动关节,运用带有精密减速箱的进步伺服电机进行控制,在关节处采用专用传感器对极限位置进行校零和检测,小臂最大旋转角度310°。(5)第五关节:为喷漆嘴旋转关节,运用带有精密减速箱的进步伺服电机进行控制,在关节处采用专用传感器对极限位置进行校零和检测,喷漆嘴最大旋转角度为340°。
其次本文对机械臂身的优化。目前我国智能机械手臂的研究较多侧重于技术创新,而忽视了产品造型以及外观的审美塑造,机械手的形态应该类似于动物的形体轮廓如图3,依据人机工程学的方法外型颜色可设计为红色,关节处用黑色, 这样使机械手臂色彩分明,让机械具有很强的辨析度,防止发生意外。
2.3 导轨的选取
机械手臂设计完成后考虑的就是导轨的选取,选取导轨应该考虑的条件为:能带动机械手臂自由滑动且操作精度高;导轨的长度可以由具体环境和使用要求进行确定。通过对市面上的导轨进行分析,本文选用的是光轴滚珠丝杠直线导轨滑台,模型如图4。这种滑台市面上较为普遍,成本不高。
2.4 控制系统的选取
本文通过对大量机械手臂控制系统进行分析,可以把机械手臂的控制系统分成几大类,主要有运动控制卡系统、PLC控制系统和单片机系统这几类,它们的特点和运用如下。
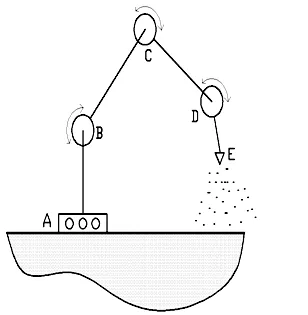
图2 机械手臂杆件分析

图3 机械手臂结构与外观

图4 轴滚珠丝杠直导轨
运动控制卡是利用大量的编程元件和微型处理器控制多个步进伺服电机的多轴协调,是以PC总线为基础专为运动环境下研发的运动控制系统,该系统包括数字输入、数字输出、脉冲输出、脉冲计数、D/A输出等功能。但这种控制方式抗干扰能力弱,结构复杂,操作易出错。在实际工业生产中运用得非常少,大多用于实验室的环境中。
单片机系统主要是在一块芯片中,集成了存储器、中央处理器等智能器件,通过单片机设计外围电路和程序设计而组成的一种控制系统。这种控制系统成本低且能实现一台微型计算机的基本功能,但要控制伺服电机则显得能力不足,不够稳定。发送电子脉冲过于缓慢,容易受到环境的干扰。这种系统较多的运用在工业设备、国防装备、电子产品和一些家用设备等。
PCL是专门为在集成控制环境下应用而设计的,具有数字运算的电子系统,它采用的是可编程的存储器,不仅可以用来在内部存储和执行逻辑运算、定时、顺序控制、算术运算和计数等操作的指令,还可以通过模拟式、数字式的输入和输出,控制多种复杂类型的机械或生产过程。PLC这种控制系统控制方便且灵活,抗干扰能力较强,并且开发软硬件周期短,各种模块之间组合快捷方便等,所以PLC控制系统是机器人研发和设计人员的首选系统。PLC控制要比单片机简单,而且实现的功能更加全面稳定。综合各种控制系统的特点分析选用PCL比较优异。
本文选择高精密级的驱动装置有交流、直流伺服驱动器、步进驱动器;传感器有光电传感器、脉冲传感器等,运用网路传感器技术,控制系统由PLC进行控制。手臂的旋转移动通过PLC高速脉冲输出进行调控。可在没有人为干扰的情况下,自动完成定位、快进、工进、快退、喷漆等一系列动作,具体顺序功能图和硬件接线图如下图5、6所示。

图5 PLC硬件接线图
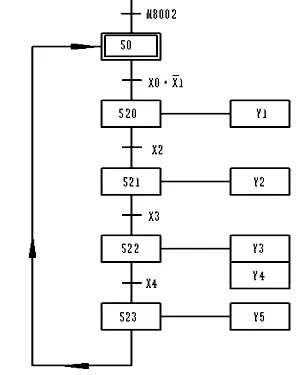
图6 PLC顺序功能图
2.5 装配及其维修
任何机械,都是由若干个最基本的零件构成的。因此机械手臂的装配过程十分重要。机械手臂的装配应严格按照装配图纸及其设计的要求,装配过程所处环境必须清洁卫生,空气中不允许存在粉尘污染或其他污染,装配的工具、零件应分别放置在专有的摆放措施上。在原则上,工具和零件是不允许直接摆放在机器上或地上,应该摆放在地毯或防护垫上,以保证机械手臂装配的精确性。但由于机械手臂的轨道较长,需要的空间相对较长,在进行布置时应该按照设施规划来进行合理的放置。
机械手臂维修应该按照以下进行考虑。首先,所规定的维修原则必须能保证机械手臂通过维修达到使用要求,且可靠性、耐用性达到标准要求;同时,在维修不能工作的机械手臂系统时应该尽量选择购买零部件,代替购买整套机械喷漆系统,从而达到组合设计的优势和经济效果,也有利于机械手臂维修工作的开展。
3 结语
本文运用模块化与组合设计系统设计出一款适应性强,控制精度高的家具业喷漆机。通过对机械手臂的创新设计以及外型优化,结合工作环境的因素对机械手臂的移动轨道进行选取,同时对常用的控制系统进行分析与设计,使机械手臂的控制系统得到最优化,从而使整个机械手臂达到科学性、实用性、美观性、合理性。目前,我国对机械手臂的研究方向主要是对机械手臂的创新与开发,这些过程都是异常艰难和漫长的,在此同时我们也应该运用各种方法使现有的机械手臂发挥更多更强的作用。
[1]李田春.标准化概论(第六版)[M].北京:中国人民大学出版社,2016:95.
[2]冯自涛.喷漆工业机器人控制系统的研究与设计[D].武汉理工大学,2013.

TP241
A
1671-0711(2017)10(上)-0110-03