基于计算机视觉的贴片元件定位检测算法研究∗
2017-10-23常君明甘祥麟
周 胜 常君明 李 洞 陈 曦 吴 冕 甘祥麟
(江汉大学数学与计算机学院 武汉 430056)
基于计算机视觉的贴片元件定位检测算法研究∗
周 胜 常君明 李 洞 陈 曦 吴 冕 甘祥麟
(江汉大学数学与计算机学院 武汉 430056)
人工业4.0时代,计算机视觉这个环节不可或缺。在分析已有光照不均处理方法的基础上,讨论了合适计算机视觉的同态滤波技术,分析了Marr-Hildreth算子进行边缘检测的应用,提出用多边形描述最大轮廓来计算元件质心与方向特征的方法。实验表明,算法在定位识别的速度、精度两方面得到了综合的平衡。
计算机视觉;光照不均;定位识别
C lassNum ber TP391
1 引言
在以智能制造为核心的工业4.0时代背景下,随着中国制造2025战略的深入,工业智能机器人产业市场呈现爆炸式增长势头,其中充当工业机器人“火眼金睛”角色的计算机视觉功不可没。而且,随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在生产生活中,视觉系统作为智能机器人系统中一个重要的子系统,也越来越受到人们的重视。
在表面贴装技术中涉及两项关键技术:一是基于视觉技术的贴片元件定位检测,另一个是运动控制。定位检测就是利用计算机视觉对图像进行处理、分析和理解,识别各种不同模式的目标和对象,快速准确地找到被测元器件并确认其位置等信息,以便后续引导机械手臂准确抓取。
目前,图像定位识别方法有很多种,但是针对计算机视觉中图像识别、分割的算法不多,其主要原因在于计算机视觉中实时性要求较高。本文从分析计算机视觉图像特点出发,在总结已有的图像分割与定位检测方法的特点及不足的基础上,对已有算法进行比较与优化,建立了合适计算机视觉的元器件定位识别算法。
2 图像增强预处理
2.1 图像增强目的
在智能工业监控等图像采集场合中,由于现场条件、拍摄角度及闪光灯使用不当或物体表面反光等原因造成的图像整体光照不均,带有暗影或明亮区域的高动态真彩图像随处可见,这在一定程度上改变了图像的原始面貌。为了尽可能地还原真实场景,获取更多有价值的现场或客体本身的信息,需对图片进行修正,消除照度不均匀的影响。为了解决图像光照不均问题,国内外文献提出了许多的解决方法,代表性的有以直方图均衡化法为代表的灰度变换法、基于照明—反射的同态滤波法、Retinex增强方法以及梯度域图像增强方法、小波变换法、背景拟合法等。
2.2 用同态滤波技术改善光照不均匀图像
同态滤波是一种在频域中进行的图像对比度增强和压缩图像亮度范围的特殊滤波方法,能够减少低频并增加高频,从而能减少光照变化并锐化边缘或细节,在很大程度保留图像原貌的同时对图像细节增强。
图像的同态滤波是基于以入射光和反射光为基础的图像模型上的,如果把图像函数 f(x,y)表示为光照函数(入射光)fi(x,y)和反射函数 fr(x,y)这两个分量的乘积,那么图像的模型可以表示为

式(1)中的光强分布取决于照明光源,而反射函数则取决于对象的物质结构形态。由于照明光源的光强分布随空间变化较小,而对象的物质结构形态复杂,反射函数随空间变化较大,因此,在频率域中,光强分布函数 fi(x,y)的频谱能量主要集中在低频区域,而反射函数 fr(x,y)的频谱能量主要集中在高频区域。为此,只要能把图像 f(x,y)中的 fi(x,y)和 fr(x,y)两部分分离开来,然后通过选择合适的同态滤波函数H(u,v),减弱图像频谱的低频分量,增强高频分量,即降低照明光源光强分布的影响,提高对象反射特性的作用,就能够有效地校正图像亮度分布不均匀的问题,锐化图像的边缘、细节,达到增强图像的目的。
2.3 同态滤波实验效果与分析
对存在光照不均图像进行同态滤波实验,实验结果如图1、图2、图3、图4所示。如果不使用同态滤波处理,要增加图像的亮度,会导致图像目标对象变的很白,而且目标对象的部分细节会丢失,使用同态滤波处理,在对图像灰度调节前,先对图像的背景进行估计,然后将原始的图像减去背景图像,这样得到的图像反映的是去除了光照影响的图像,可以保留图像细节,然后在通过灰度调制拉大图像像素的灰度差距,使得图像细节得以表现。
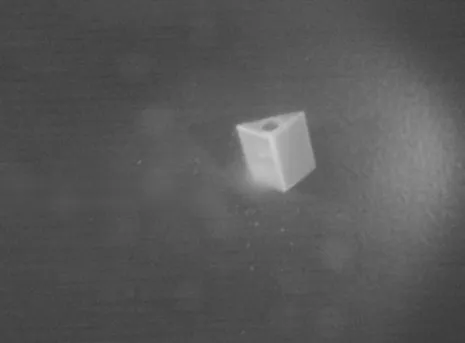
图1 原始图像
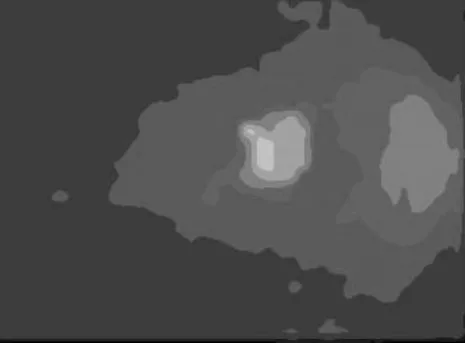
图2 总体背景灰度

图3 减去背景后的图像

图4 灰度调整后的图像
3 元件属性特征求解
3.1 边缘检测
在表面贴装技术中贴片元件的边缘检测的核心问题是:定位精确与抑制噪声。而由Marr和Hildreth提出的Marr-Hildreth算子正是基于这两点。Marr-Hildreth算子以高斯函数为平滑算子,结合拉普拉斯算子提取二阶导数的零交叉理论进行边缘检测。Marr和Hildreth理论证明边缘检测中灰度变化与图像尺寸无关,检测算子可为不同尺度,灰度变化梯度在一阶导数的极值点,或在二阶导数为零的交叉点。
在拉普拉斯算子∇2中,满足 f是标准差σ的二维高斯函数为

对 ∇2f(x,y)求微分,得到拉普拉斯拉斯(LoG):
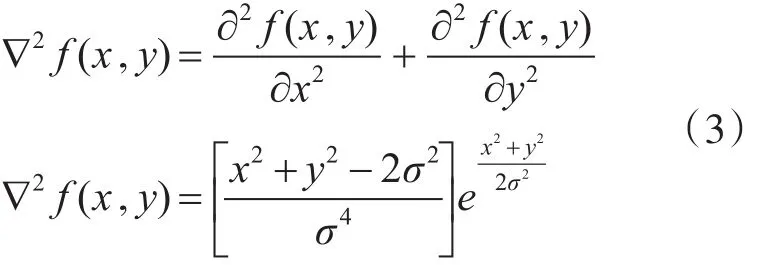
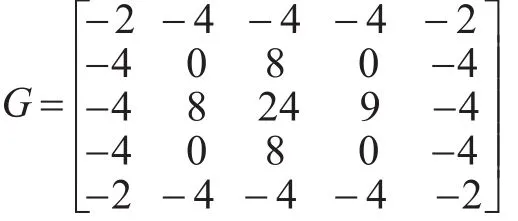
LoG算子核心的思想就是应用二阶微分算子特性,对原始数据图像进行二次微分求其零交叉,判断相关高灰度的变化方向。噪声点对边缘检测有一定的影响,而二阶微分算子对噪声相当敏感。所以把高斯平滑滤波器和拉普拉斯滤波器结合起来,先平滑掉噪声,再进行边缘检测,效果会更好。常用的LoG算子模板如下
3.2 寻找最大轮廓
虽然Marr-Hildret算子之类的边缘检测算法可以根据像素之间的差异,检测出轮廓边界的像素,但是它并没有把轮廓作为一个整体。寻找轮廓会找到一系列大小不同的轮廓,而元件肯定是这一系列轮廓中最大的,所以本文提出了在工业实践环境中最大轮廓就是我们要寻找的元件轮廓的观点。
3.3 实验效果分析
质心和方向特征是元件最基本的特征属性,本文主要以这两个属性为例进行实验。文中创新性地提出用多边形来描述寻找到的最大轮廓,这样元件属性特性求解就进一步简化为对矩形属性的求解。实验平台是VS2012下基于OpenCV开源库。实验过程与最后效果如图5、图6、图7所示。求解的元件方向特征值(角度)为:α=20°。质心坐标为:x=119,y=118。
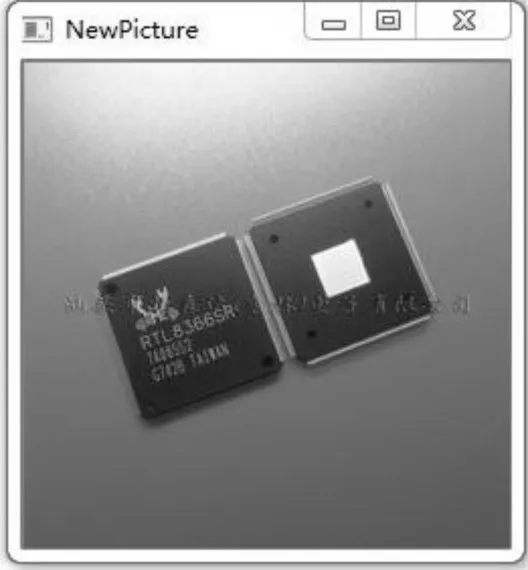
图5 原始图片
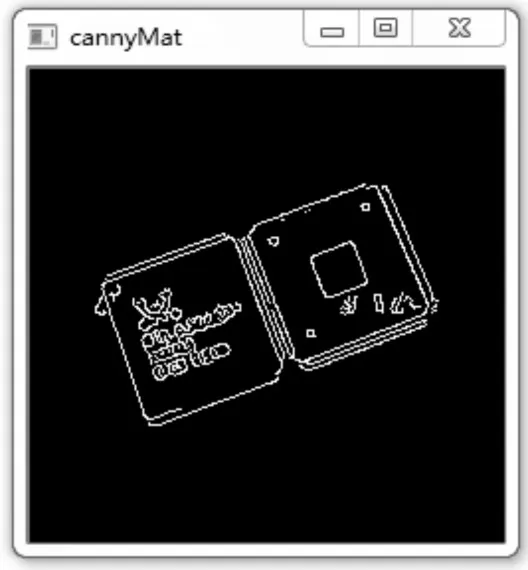
图6 边缘检测图
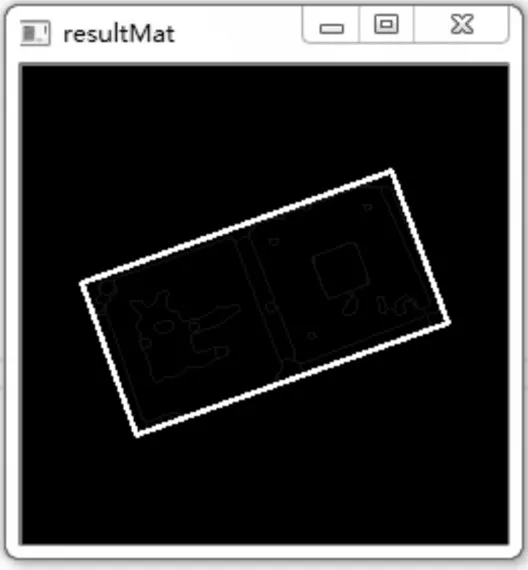
图7 元件最大轮廓
4 结语
表面贴装技术中元件属性主要有质心和方向特征,本文主要围绕这两方面进行描述。本文思想的最大特色是利用多边形(矩形)来描述元件最大轮廓,这样做的好处就是能直接利用多边形(矩形)来快速求解相关属性,大大减少了程序算法的复杂性。
[1]李金华.德国“工业4.0”与“中国制造2025”的比较及启示[J].中国地质大学学报(社会科学版),2015,15(5):71-79.
[2]贺正楚,潘红玉.德国“工业4.0”与“中国制造2025”[J].长沙理工大学学报(社会科学版),2015,30(3):103-110.
[3]谢俊,吴荥荥,朱广韬,王路路.基于机器视觉的二维尺寸检测[J].工具技术,2017,(1):98-100.
[4]严小红.计算机视觉在条形码缺陷检测中的应用[J].华侨大学学报(自然科学版),2017,1(38):109-112.
[5]段红燕,邵豪,张淑珍,张晓宇,王小宏.一种基于Canny算子的图像边缘检测改进算法[J].上海交通大学学报,2016,12(50):1861-1865.
[6]邓辉,谢俊,孟广月,等.基于机器视觉的重复定位精度测量技术[J].电子测量技术,2014,37(12):45-48.
[7]王秋云,罗鸿斌.基于改进同态滤波的光照不均车牌图像增强方法[J].中国建材科技 ,2016,(6):160-162.
[8]田小平,程新,吴成茂,刘一博.基于同态滤波的彩色图像增强[J].西安邮电大学学报,2015,20(6):51-55.
[9]刘南艳,刘菁,厍向阳,付秋实.光照不均条件下的钢管图像分割算法研究[J].激光杂志,2016,37(3):46-49.
[10]朱伟,赵春光,欧乐庆,王寿峰.OpenCV图像处理编程实例[M].北京:电子工业出版社,2016.
[11]毛星云,冷雪飞等.OpenCV3编程入门[M].北京:电子工业出版社,2015.
Research on the Positioning and Recognition of Industrial Com ponents Based on Com puter Vision
ZHOU Sheng CHANG Junm ing LIDong CHEN Xi WU Mian GAN Xianglin
(DepartmentofMathsand Computer,Jianghan University ,Wuhan 430056)
In the era of artificial industry 4.0,computer vision is indispensable.Based on the analysis of uneven illumination processingmethod,the paper discusses the homomorphic filtering technique for proper computer vision,and analyzes the application ofmarr-hildreth operator in edge detection.Anewmethod ofdescribing themaximum contourswith polygons is presented to calculate the component centroid and direction characteristics.The results show that the algorithms achieve the balance between the speed and the accuracy.
computer vision,uneven illumination,recognition and detection
TP391
10.3969/j.issn.1672-9730.2017.09.025
2017年3月10日,
2017年4月29日
湖北省建设科技计划项目(2016);江汉大学学生重点科研项目(2016)资助。
周胜,男,研究方向:信息技术。常君明,男,副教授,研究方向:图像处理。李洞,男,研究方向:信息技术。陈曦,男,研究方向:嵌入式技术。吴冕,男,研究方向:信息技术。甘祥麟,男,研究方向:信息技术。
