无泄漏自动注入系统的方案设计
2017-10-21李金萍王飞飞房妤
李金萍 王飞飞 房妤

摘 要:系统的重点是自动注取液体和保证无泄漏,在工作时能够快速、准确的控制,且稳定运行。
关键词:无泄漏;自动注取;清洗
1 概述
整个系统的重点是自动注取液体和保证无泄漏。取液时,原料瓶倒置,针头插入瓶中,取出原料液体后,调转方向朝下将液体注入到发生器中,完成注入后使用类似盖上瓶塞的方式将发生器的注入口处安装螺栓,拧紧密封,从而实现了无泄漏的自动注取液体。
2 方案构想
根据系统注入要求的分析,我们提出一些相应的解决方案:整个装置分为上、中、下三个主体部分,最上层是原料瓶的供送装置,用于将待取液的原料瓶供送至取液工位上,如图1所示。
2.1 注入时通路建立的分析
在这个药剂的注入过程中要求无泄漏,这个联接发生罐体的管道就必须无泄漏和密封性很好,在注入时,首先建立一个通路实现这个注入过程,因为注入机构与发生罐罐体独立,与药瓶也独立设置,这样注入完一次就清洗一次注入装置,注入的药剂不会与其他的药剂相混,注入的药剂纯度高,为事先提供的药剂纯度,在发生罐内的药罐设计中难度也会相应降低。当注入系统出现问题时,对于整个发生系统的气体发生系统没有影响,仍可以正常运行,整个系统的可靠性、安全性都会高很多。药瓶用标准方式封装,清洗很方便,再结合药瓶封装结构,用一个注针来实现,注入时药瓶再与发生罐罐体之间联通。
2.2 注入动力的方案分析
在注入时,必须要一个动力来将药剂从封装药瓶中注入到发生罐内,首先使发生罐内产生一个负压,然后在注入时接通一个外部小正压。这种方法可以提高压力差,使药剂的注入更彻底,也能避免在发生罐处因为发生罐内的压力小于外界压力而产生一个负压差。这样就能避免因为通气时而产生的泄漏,因为空气的通入是一个小正压,也是一个压力源,是个封闭的只进通路。
2.3 注入通路接通时的防泄漏分析
当注针与药瓶、注针与发生罐同时接通而形成注入通路时,要使这个过程不产生泄漏,在注入通路接通前,把注针头密封好,可密封一头,也可两头都密封,方法是在注针端头用一个小的橡胶套帽封注这个针头,当接通时,就能够先将一端先插入不用怕另一头泄漏了,加密封帽的方法为:就是在下端头用一个单向阀来密封住,这样在先接通注针与药瓶后,不会因为下端口产生药剂的泄漏。这种方式控制系统控制起来比较容易,精度要求也不会太高,较为经济。但是这种方式可能会产生小量的药剂污染这个密封头,且这个密封头的小污染也不能忽视,须注完一次后对注入通路处进行清洗。
2.4 药瓶放置方式和注针插入位置的分析
通过分析,药瓶选用ISO 13# 2mL西林瓶,药瓶用一头封口的方式封装,这样的封装只有一个端口,其他的地方为一个整体,这样的能减少药剂渗透和从密封缝中扩散出去了可能,也更便于较长时期的存放药剂。可以将药瓶倒放,使封装端口在下方,药剂在药瓶的密封端口,这样便于注入,且注入的程度比较彻底。注针和洗针同时从下方一起注入,注针比洗针较短刚好穿透密封橡胶为止,洗针几乎要穿到药瓶的底部,这样穿入会在洗针的外表面附上一层药剂,会对洗针有一些污染。但是在后面的清洗过程中为将清洗液充满整个药瓶,能将洗针外表面的附着的药剂洗掉,因此问题不大。这种方式注针和洗针同时穿入瓶中,针的穿入和夹持机构较为简单,成本为低一些,控制过程也容易。
2.5 药瓶夹持以及与针相对运动的分析
根据药瓶的形状、倒置及自动选位,可以采用拨轮固定药瓶。这个定位使其不再有左右运动,而药瓶的竖直方向上的定位则是由药瓶的底部与拨轮座凹平面来实现的。这种夹持方式,便于药瓶的安装和注完药剂后的移除。药瓶要有相对注针的上下运动,从而实现针头刺入到药瓶中,所以药瓶的夹座应当能相对于针而上下运动,则使用气缸来提供动力实现这个相对运动过程。气缸工作时要有一个气压工作站提供气压,动力来推动气缸,气缸的工作环境很干净,且当一个系统中有气压源时,引入一条回路来实现这个运动是很容易的,气缸的工作原理和控制较为简单,成本也较低,但是控制精度不是很高,故可以考虑用气缸[ 1 ]来实现这个相对运动。
2.6 注针进给运动的驱动分析
因为注针和洗针是同时穿入药瓶,与药瓶有相对运动,然后针与发生罐罐体的密封层也有相对运动。在注入过程中,空间上的位置是药瓶在最上方,注针在中间,发生罐的密封门在最下方。将气注针和洗针的夹座固定在一滑台上,再将一个气缸联接在这个滑台上,气缸带动药瓶座,就能实现药瓶与针之间的相对运动。要实现针与发生罐之间的相对运动,可以考虑用一个能实现直线运动的机构来实现滑台的向下运动,用伺服电机[ 2-3 ]或是步进电动机,主要优点就是控制的精度高,控制的系统程序和方法较为复杂,结构也较为复杂,必须要有一个专门的能导向机构、一个丝杠副来传递动力、一个变速机构和联轴器等,推力相对来说也不大,占用的空间较小,结构较为紧凑。故选用步进电机加丝杠的驱动方式来实现这个运动,电机类型的选用需要根据其他的要求来决定。
2.7 清洗功能的分析和設计
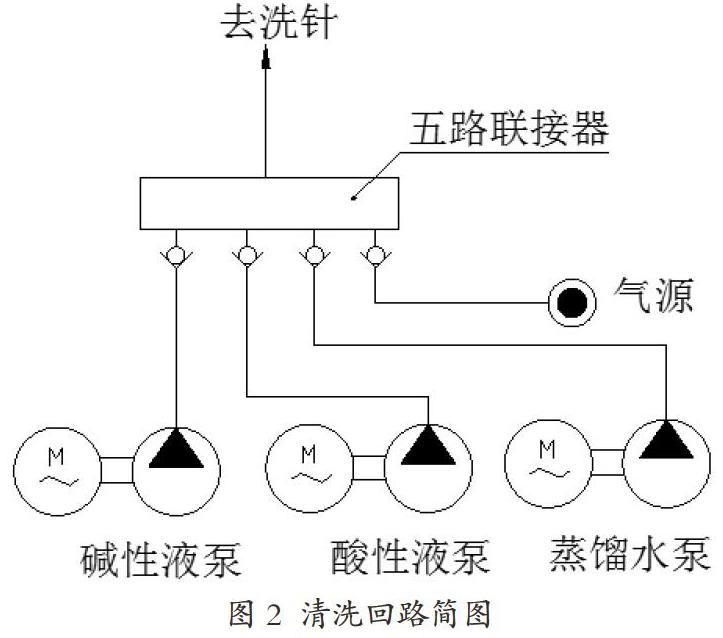
要在注入完成时达到清洗药瓶和注针内壁的功能,需要用一种清洗液与这个相应的残余药剂反应使其失去本来的药性,不会发生其他的危害,这时将清洗液排出,再用蒸馏水来对这个排去清洗液的药瓶、注针、洗针和整个清洗通路进行清洗,如下图2所示。
这个清洗过程完成后,再用一个干净且有一定气压的空气通入到这个清洗回路中来,实现排尽这个清洗回路和注针系统内部的残余水的目的,以达到保护清洗回路和以备下次注入使用。因为考虑到有不同的药剂,故清洗时,就会有不同种类的清洗液,这里要考虑的是根据药剂的酸碱性分为两种,这样的话就有两种清洗液,再加上一路蒸馏水和一路空气,总共就有四路的通入路,一路出去接到洗针上的输出路,就有五路的連接器实现通路的变换。要达到通路变换后,不会有各路物质的相互干扰和反流现象,必须要在通路的各入口处接上一个可单向关闭的阀体。
3 结论
主要介绍了对系统设计要求的分析和方案的构想,对系统的工作环境和工作过程进行分析,从而得出的几点重要的设计要求,依据这些设计要求,找到问题并提出一些相应的解决方案。
参考文献:
[1] 宋小冬.气缸定位系统的控制策略和应用[D].上海交通大学,2007.
[2] 刘扬.浅析伺服电机在自动控制系统中的应用[J].科技视界,2014(18).
[3] 凌军.伺服电机在自动控制方面的应用[J].科技与企业,2013(23).
