基于CAN总线的交通智能控制*
2017-10-21郭美春佟国栋谢云梦朱金荣
王 勇,郭美春,佟国栋,谢云梦,朱金荣,邱 祥
(1. 扬州大学 物理科学与技术学院,江苏 扬州 225002; 2. 江苏省扬州市高邮市高邮中等专业学校,江苏 扬州 225002;3. 华南理工大学 电子信息学院, 广东 广州 510000)
基于CAN总线的交通智能控制*
王 勇1,郭美春2,佟国栋1,谢云梦3,朱金荣1,邱 祥1
(1. 扬州大学 物理科学与技术学院,江苏 扬州 225002; 2. 江苏省扬州市高邮市高邮中等专业学校,江苏 扬州 225002;3. 华南理工大学 电子信息学院, 广东 广州 510000)
为了进一步提高十字路口的车辆通行效率,提出基于CAN总线的交通管理智能控制设计方案。该系统包括硬件控制模块、车流量采集模块、上位机软件等部分。硬件控制模块由主控模块、驱动模块、硬件黄闪模块等组成。主控模块与驱动模块之间采用CAN总线通信,具有通信速率高、可靠性好的优点。主控模块负责协调调度各个模块之间的工作;驱动模块负责驱动路口的信号灯及故障检测;车流量采集模块负责采集排队车流量数据,为智能配时提供依据。调试结果表明,该控制系统能够根据车流量智能调节车辆通行时间,提高车辆通行效率。
智能交通;CAN总线;STM32F103 module;信息采集
0 引言
随着机动车辆不断增加,很多城市出现了交通拥堵的现象[1]。为了解决交通拥堵,一方面应改良城市道路基础设施,另一方面则应提高交通灯控制系统对车流量的调度效率。
经过调研,大部分城市使用的交通信号控制器采用固定时间的调度策略[2]。这种调度策略对于车流量均衡的路口调度效率较高,但对于车流量变化较大的路口调度效率较低。为了提高对车流量变化较大路口的调度效率,本文提出基于CAN总线的交通管理的智能控制系统解决方案。该方案通过地磁检测器采集路口车流量信息作为交通灯控制器配时方案的参考数据,控制器根据车流量智能分配通行时间,有效提高通行效率。
1 系统设计方案
基于总体的设计要求,提出了如图1所示的系统整体设计方案。该系统方案主要包括主控模块、4个驱动模块、硬件黄闪模块、图像采集模块、DSP处理器和上位机通信软件等。此方案能够很好地满足设计要求,主控板提供以太网接口,方便连接上位机软件,4个驱动模块可以提供16组信号输出,在系统出现故障时,系统转为硬件黄闪状态,可以保证道路安全畅通。DSP处理器主要作用是对图像采集模块采集到的车辆图像进行处理以及使用神经网络控制算法进行车辆通行时间的预测。整个系统的设计采用模块化的设计思想,方便故障模块的更换。

图1 智能交通控制系统方案示意图
2 主控模块设计
2.1主控模块的设计
主控模块使用STM32F103ZET6微处理器,最多可以提供5个串口便于与外设进行通信,同时支持CAN2.0B接口[3-5],方便主控模块与驱动模块之间的通信。主控模块负责连接、控制其他模块,在整个控制系统中起重要作用。由于系统功能的需要,在主控模块上添加了多种接口。
(1)三路串行接口:一个串口连接蓝牙模块;另一路串行接口接GPS模块,用以为信号机授时;剩下的一个串口留作调试使用。
(2)一个485接口:用来接收来自图像采集模块的车流量信息。
(3)CAN通信接口:用来与驱动模块进行通信。
2.2主控板最小系统电路
主控板最小系统电路是保证STM32微处理器能够运行的必不可少的电路,主要包括电源供电电路、振荡电路、复位电路、JTAG调试电路等。
(1)电源供电电路
STM32F103ZET6微处理器的供电电压为3.3 V,系统外部提供的电压为5 V,需要使用稳压电路提供给主控模块所需电压。这里选择使用AMS1117-3.3稳压器。
(2)振荡电路
振荡电路是整个电路工作的基础,为整个电路提供基准的频率。在对STM32任何功能模块进行编程时,都要先打开其对应的时钟控制器,这样的操作可以很好地控制芯片的功耗。同时,也可以在有处理任务时增大系统时钟频率,提高处理效率,在没有处理任务时降低系统时钟,减小系统功耗。图2为振荡电路原理图。

图2 振荡电路原理图
(3)复位电路
为了使整个系统始终工作在正常的状态下,在主控模块和驱动模块中都加入了复位电路。具体原理图如图3所示。MCU配置一个定时器输出接口接到WDI管脚,如果此接口一直固定保持高电平或低电平,则1.6 s以后SP706SEN内部的看门狗定时器就会溢出并使/WDO输出低电平,同时/MR输出低电平信号使MCU复位。在正常运行时,MCU及时地产生翻转信号,俗称“喂狗”,确保微处理器不复位。同时它集成了上电复位、掉电复位等功能,并具有手动复位功能[6-7]。

图3 复位电路原理图
(4)JTAG调试电路
STM32微处理器支持在线调试功能,很大程度上方便了硬件编程工作。通过对编写的程序进行单步调试,能够很容易找到程序编写的错误位置,提高编程效率。图4为JTAG调试电路,图中网络标号均为STM32微处理器的引脚。
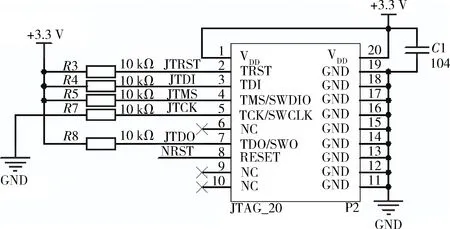
图4 JTAG调试电路
2.3GPS模块与蓝牙模块
GPS模块的主要作用是为主控模块提供基准时间以及具体的位置信息。GPS模块为单独设计的可插接电路,其通过串口与主控模块通信[8]。
2.4CAN接口电路
CAN接口电路使用CTM1051A通用CAN隔离收发器。图5为CAN通信模块原理图。由图中可以看出,组成CAN通信的电路很简单,STM32F103微处理器的CAN_TX和CAN_RX管脚直接连接到CTM1051A的对应管脚上就可以实现CAN通信,通信速率最高可以达到1 Mb/s。

图5 CAN通信模块原理图
3 驱动模块设计
3.1驱动模块软件设计
每个驱动模块负责一个路口的所有信号灯的驱动。本系统设计每个驱动模块可以驱动12路信号灯。驱动模块对于信号灯的控制主要依赖于从主控模块接收到的控制命令。驱动模块通过CAN总线从主控模块接收控制命令后,解析出符合本模块地址信息的相关参数,并立即将参数运用到驱动系统中[9]。通过这种方式能够实现4个驱动模块动作的同步。
3.2驱动控制电路设计
驱动模块采用的微控制器芯片是STM32F103系列芯片中的STM32F103RBT6处理器。该小容量处理器的封装为LQFP64,完全能够满足驱动板的设计要求[10]。本系统设计中,单个驱动模块可以控制12路通道,系统设计有4个驱动模块,一共可以控制48路通道, 可以充分满足现在交通路口的行车需求。下面就驱动板中的具体控制电路选择一路进行说明。电路原理图如图6所示。

图6 交通信号灯驱动电路原理图
信号灯驱动电路是一个典型的MOC3061系列光电双向可控硅驱动电路[11]。当2号脚为低电平时,光耦导通,双向可控硅导通,此时Lin与Lout处于导通状态;相反,当2号脚为高电平时,光耦不导通,此时Lin与Lout处于断开状态。其中R1为限流电阻,使输入的电流控制为15 mA。R2为双向可控硅的门极电阻,可提高抗干扰能力。R3为触发双向可控硅的限流电阻。R4电阻与C1电容组成浪涌吸收电路,防止浪涌破坏双向可控硅。
3.3硬件黄闪模块设计
为了保证系统的正常运行,除了上面叙述过的复位电路以外,系统还设置了硬件黄闪模块用以应对系统出现的故障。复位电路能够在系统软件出现异常的情况下,重启软件程序;如果重启软件程序也不能解决软件异常则启动硬件黄闪模块。它的主要控制功能是:以1s为周期闪烁四个路口的所有黄色信号灯,提醒车辆驾驶员减速慢行、注意交通安全。图7为硬件黄闪模块原理图。

图7 硬件黄闪模块原理图
4 系统软件设计
主控模块在整个系统中处于核心位置,其主要负责接收DSP处理器发送来的各个路口预测通行时间。其次主控模块通过CAN总线统一控制4个驱动模块协调工作[12]。在整个工作过程中,主控模块不断向硬件黄闪模块发送脉冲信号,使硬件黄闪模块处于休眠状态;否则系统将进入硬件黄闪状态。对于上位机发送的信息,主控模块通过网络接口进行接收处理。具体的程序流程图如图8所示。

图8 主控模块程序流程图
5 系统联调与测试
为了简化模块之间的电路连接,使通信信号更稳定可靠,主控模块与4个驱动模块采用欧式插座统一连接到一块电路板上,此电路板上有CAN通信总线、电源线等。对于信号机的远程控制需求,编写了适用于信号机的上位机软件。通过对整个系统的联合调试,交通灯控制系统实现了固定时间方式的运行。
由于整个系统还未安装到交通路口采集交通流量数据,在系统智能配时方案测试时采用上位机软件模拟车流量采集模块向主控模块发送车辆信息。配时方案采用四相位方式,通行周期设置为120 s。上位机向信号机发送4个方向的车辆数,信号机根据车辆数智能分配路口通行时间。表1为智能配时时间与车辆数关系表。实验表明,智能信号机能够根据车流量信息智能分配路口通行时间。

表1 智能配时时间与车辆数关系表
6 结论
本文从提高对变化车流量调度效率的角度出发,设计了基于CAN总线技术的交通管理控制系统。经测试,该系统能够根据车流量信息智能调节车辆通行时间,提高了车辆通行效率。系统模块之间采用CAN总线通信,通信速率高、稳定性好。整个系统采用模块化设计思想,方便了系统的维护。能够根据排队车辆数预测车辆的通行时间。本系统安全可靠,参数配置方便,具有一定的推广价值。
[1] 郭继孚,刘莹,余柳.对中国大城市交通拥堵问题的认识[J].城市交通,2011,9(2):8-14,6.
[2] 金茂菁.我国智能交通系统技术发展现状及展望[J].信息与安全,2012(5):1-5.
[3] 杨飞,郑贵林.基于CAN总线的监控系统设计[J].微计算机信息,2005,21(7):34-36.
[4] 喻金钱,喻斌.STM32F系列ARM Cortex-M3核微控制器开发与应用[M].北京:清华大学出版社,2011.
[5] 孙书鹰,陈志佳,寇超.新一代嵌入式微处理器STM32F103开发与应用[J].微计算机应用,2010,31(12):59-63.
[6] 陈健.基于AWA14423探头的数字声级计的研制[D].哈尔滨:哈尔滨工业大学,2011.
[7] 曹晓伟.MOC3061系列光电双向可控硅驱动器[J].国外电子元器件,1996(12):2-4.
[8] 王毅峰, 温希东. 基于CAN总线的智能控制器的设计[J]. 仪表技术与传感器, 2006(4):32-34.
[9] 颜自勇. CAN总线技术在智能楼宇通信中的应用[J]. 安防科技,2006(4):18-19,54.
[10] 熊茂华.基于CAN现场总线的智能交通信号控制系统[J]. 工业控制计算机,2006,19(9):56-57,64.
[11] 黄波士.基于CAN总线的集散控制系统的研究与设计[D].济南:山东科技大学,2003.
[12] 冯亚军. 重型汽车CAN总线控制系统的应用研究[D].济南:山东大学,2006.
Traffic intelligent control based on CAN bus
Wang Yong1, Guo Meichun2, Tong Guodong1, Xie Yunmeng3, Zhu Jinrong1, Qiu Xiang1
(1. School of Physics Science and Technology, Yangzhou University, Yangzhou 225002, China;2. Gaoyou Secondary Professional School, Yangzhou 225002, China;3. School of Electronic Information, South China University of Technology, Guangzhou 510000, China)
In order to further improve the efficiency of the vehicle at the crossroads, the intelligent control design scheme of traffic management based on CAN bus is proposed. The system includes hardware control module, traffic flow acquisition module, PC software and other parts. The hardware control module is composed of the main control module, the driving module and the hardware yellow flash module. The main control module communicates with the drive module using the CAN bus, with high communication speed, the advantages of good reliability. The main control module is responsible for coordinating the operation between the various modules; the driving module is responsible for driving the signal lights and fault detection at the intersection; the traffic flow collecting module is responsible for collecting the queuing traffic data and providing the basis for the intelligent timing. The debugging results show that the control system can adjust the vehicle transit time according to the traffic flow and improve the vehicle traffic efficiency.
intelligent traffic; CAN bus; STM32F103 module; information acquisition
TP29
A
10.19358/j.issn.1674- 7720.2017.19.002
王勇,郭美春,佟国栋,等.基于CAN总线的交通智能控制[J].微型机与应用,2017,36(19):6-8,15.
江苏省科学基金(BY2016069-14)
2017-05-02)
王勇(1970-),男,博士,工程师,主要研究方向:电子技术。郭美春(1976-),女,本科,主要研究方向:光电技术。佟国栋(1990-),通信作者,男,硕士研究生,主要研究方向:嵌入式系统。E-mail:745093889@qq.com。
