下肢外骨骼助力装置
2017-10-19王诺彬李晓丹李佳希李正帅陈泽勇
王诺彬,李晓丹,李佳希,李正帅,陈泽勇
(辽宁工业大学 机械工程与自动化学院,辽宁 锦州121001)
下肢外骨骼助力装置
王诺彬,李晓丹,李佳希,李正帅,陈泽勇
(辽宁工业大学 机械工程与自动化学院,辽宁 锦州121001)
提出了一种仿生的下肢外骨骼助力装置,依据人体的运动,为穿戴者提供辅助力。介绍了该拟人仿生助力机械腿的总体机械结构及相关的硬件电路控制方案,编制了相应的软件程序。实验证明,该助力装置能够帮助人减轻劳动强度。
仿生助力装置;机械腿;系统设计
随着快递行业的高速发展,消费者购买的各种规格、重量的物品越来越多,同时带来的就是快递员搬运运输问题。目前,快递物品基本靠快递员进行人工搬运,不仅费时费力,而且工作效率还低,当所搬运物品太重时,货物容易脱手掉到地上,发生物品的破损。
为了解决工作人员费力问题,提出了一种下肢外骨骼助力系统,它采用电机驱动[1],可以实现对人体腿部行走提供动力,通过液压锁死装置与助力骨架对脚部承载重物实现助力支撑。它穿戴在快递员的下肢上,在不妨碍人的基本行走功能的前提下,帮助快递员减少搬运重物时的劳动强度,减轻快递员工作负担,而且能保障商品安全,使快递员省力高效的完成搬运物品的任务,避免了边走边停,摇摇晃晃的情况,与人体组成了一个协调的整体。同时本文提出的装置具有控制简单,不用搭建复杂的控制平台,降低成本的特点。
1 下肢外骨骼助力装置机械结构简介
由于人体下肢关节较多,实现较为复杂,为简化机构,将髋关节简化为一个球销副[2],只具有两个转动自由度(大腿前后摆和左右摆),外骨骼腰部和人体腰部固连,使人体腰部的三个自由度不受外骨骼限制,膝关节仍然为转动副,其他自由度都由人体自由支配[3],使得运动规律和人体自然行走步态的规律十分吻合,运动规律固定,具有较高的稳定性,达到辅助人行走减少行走消耗的目的;同时在不增加能源情况下,可实现侧向摆动,增加运动灵活性。本装置直接采用电机带动,避免了能源的二次转换,并且小腿转动采用了液体锁死装置(无需液压泵动力源),降低了能耗,减轻了负载。
装置总体结构如图1所示。驱动电机(17)固定在下肢外骨骼助力系统的背后电机固定架(1)上,电机轴通过万向联轴器(2)与固定在主动同步带轮(16)上的轴(15)相连,并且与侧向摆动装置(3)在同一水平面上,同步带轮轴均插入带有轴承的法兰盘(13)中,法兰盘和机架固定。主动同步带轮和从动同步带轮(12)通过同步带(14)传递扭矩,从动同步带轮与曲柄连杆机构(11)的一端连接,连杆机构另一端连接到助力装置大腿(4)外侧的轴(10),配合后可以带动大腿的抬起和落下,小腿(6)则使用液体锁死装置(7)的伸缩来完成抬腿动作,脚掌(8)两侧的行程开关(9)检测行走时的重力变化。大腿、小腿以及脚掌之间使用转动轴(5)进行连接。每条腿均由一个驱动电机和一个液体锁死装置控制,所有电机和液压装置由控制系统发出不同命令进行控制,达到对下肢外骨骼助力系统的控制。该装置的大部分重量作用在髋关节,有效地降低了腿部转动的惯量,降低了电机的能耗。
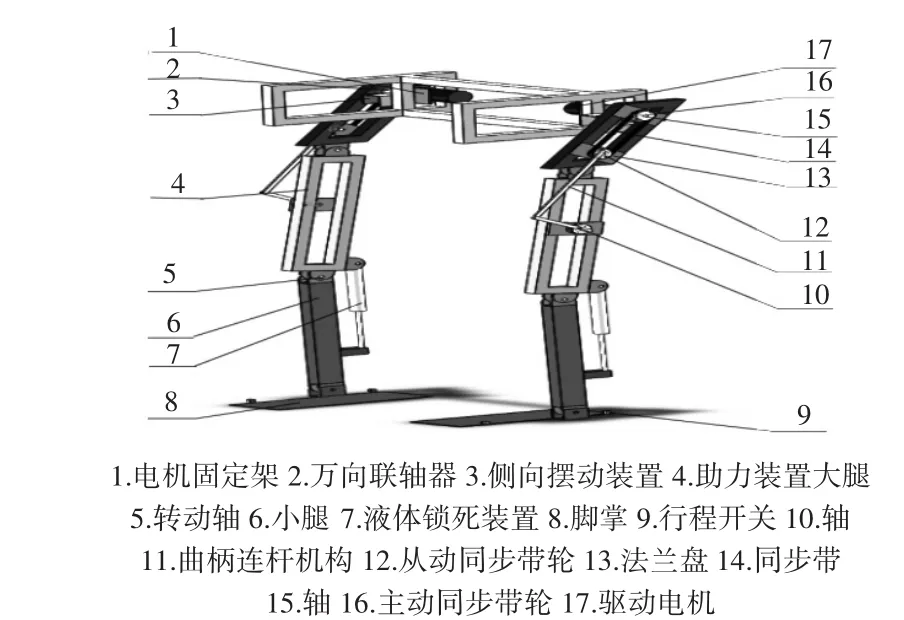
图1 下肢外骨骼助力装置结构图
2 控制系统设计
装置采用MC9S128单片机作为主控制器,其控制总体方案如图2所示。外部传感器、启动开关、调速按钮作为输入信号给单片机,单片机接收外部的信号进行处理,将处理完的信号经光耦隔离控制外部元件驱动器和电磁阀,控制驱动电机和锁死装置[4-5]。其中,电机用来控制大腿转动,液体锁死装置控制小腿转动,两个行程开关分别安装在两个脚掌上,用来判断每条腿的着地情况,实现两条腿交替信号的转换;通过调节调速旋钮发出不同的电信号给单片机,单片机识别处理,来控制电机转速,适应不同人的行走步伐。整体的动作过程是,按动启动按钮,电机开始转动,带动大腿连杆运动,如果感觉行走的速度较快,则通过按下减速按钮改变控制驱动器的占空比,从而降低电机的转速,步伐速度变小;若占空比降到最小,再次按下减速按钮电机不在减速,保持最小转速;如果感觉电机的转速较慢,则通过按下增速按钮增值控制驱动器的占空比,来提高电机的转速,同样当占空比达到最大值,转速也不再增加,保持在最大速度。当想要停止时按下停止按钮,单片机停止发送PWM波,电机停止工作;程序初始化主要是完成对所用到的寄存器设置。具体工作流程如图3所示。
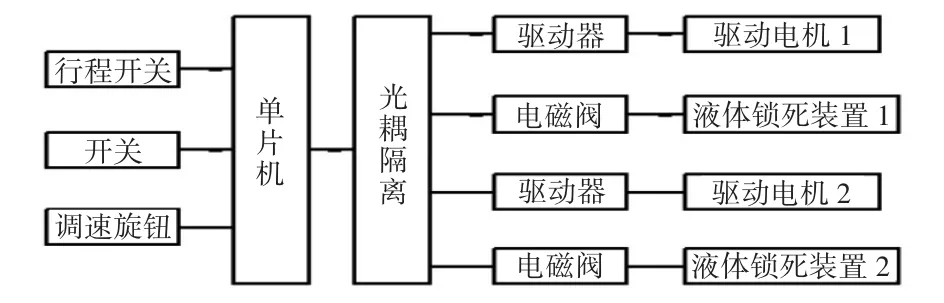
图2 控制总体方案

图3 控制总体方案
基于以上设计开发的下肢外骨骼助力装置实物如图4所示。通过穿戴者感受,该装置能很好的满足功能需求,实现了助力。
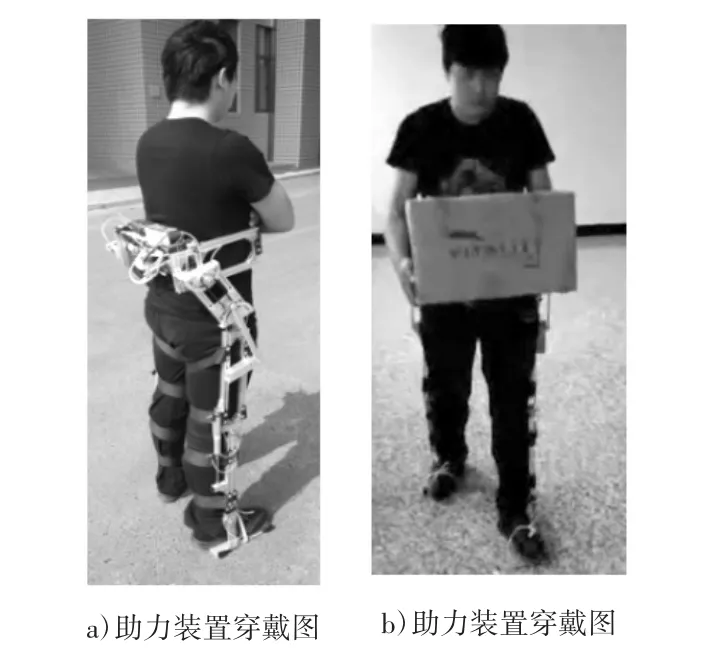
图4 实验图片
3 结束语
本文所提出的下肢外骨骼助力系统相当于一个搭载器,它能根据人体运动及传感器信息来提供助力,实现动力输出,达到助力的目的;并且该装置简化了人体的复杂关节,具有控制简单,成本低的特点,具有一定的推广价值。
[1]张建民.机电一体化系统设计[M].4版.北京:高等教育出版社,2014.
[2]孙 桓.机械原理[M].8版.北京:高等教育出版社,2013.
[3]崔启坤.机械腿.中国,实用新型专利.1035642[P].1989.9.20.
[4]周国雄,晏密英.单片机应用系统设计精讲[M].北京:中国铁道出版社,2011.
[5]李仁浩,龚思敏,杨 帆,等.基于单片机控制太阳能智能跟踪控制系统的设计[J].仪表技术与传感器,2015(04):51-53.
The Lower Limb Exoskeleton Booster
WANG Nuo-bin,LI Xiao-dan,LI Jia-xi,LI Zheng-shuai,CHEN Ze-yong
(College of Mechanical Engineer and Automation,Liaoning University of Technology,Jinzhou Liaoning121000,China)
A bionic limb exoskeleton booster was proposed to provide the wearer with the help of the body.This paper introduces the overall mechanical structure and related hardware circuit control scheme of the humanoid assisted mechanical leg,and the corresponding software program is developed.Experiments show that the booster can help reduce the intensity of labor.
bionic power booster;mechanical legs;system design
TP242.3
A
1672-545X(2017)08-0074-02
2017-05-06
王诺彬(1995-),男,内蒙古赤峰人,本科在读,研究方向:机械电子工程;李晓丹(1982-),女,辽宁盘锦人,副教授,硕士,研究方向:自动控制。
