混凝土布料机器人机械臂铰点优化分析
2017-10-19王云磊祁宇明邓三鹏彭淑萍周旺发
王云磊,祁宇明,邓三鹏,彭淑萍,周旺发
(1.天津职业技术师范大学机器人及智能装备研究所,天津300222;2.天津博诺智创机器人技术有限公司,天津300350)
混凝土布料机器人机械臂铰点优化分析
王云磊1,祁宇明1,邓三鹏1,彭淑萍1,周旺发2
(1.天津职业技术师范大学机器人及智能装备研究所,天津300222;2.天津博诺智创机器人技术有限公司,天津300350)
机械臂是混凝土布料机器人的重要部件,机械臂铰点设计的合理与否决定了混凝土布料的稳定性和准确性。使用Solidworks软件建立混凝土布料机器人机械臂的三维模型,并使用Solidworks motion对机械臂进行运动学的仿真,得出机械臂之间铰点油缸的压力曲线,并对铰点进行优化设计。
机械臂;铰点;运动学;优化设计
机械臂是混凝土布料机器人最为重要的部件之一,其主要作用是把水泥混凝土连续、均匀、精确地输送到浇筑位置。机械臂的铰点相当于布料机器人的关节,在混凝土浇筑过程中起到了关键的作用,其设计的合理与否直接影响混凝土布料机器人的综合性能以及机械臂的浇筑精度。
Solidworks Motion是Solidworks的一个运动仿真模块,其主要功能是为工程设计人员提供虚拟样机的仿真分析工具,通过对复杂的机械零件进行动力学和运动学的仿真,获得速度、加速度、作用力等相关数据,并应用图标、动画等方式表现出来,详细地反映出机械零件间运动特性。本文使用Solidworks Motion软件对混凝土布料机器人的机械臂铰点进行优化分析。
1 机械臂铰点数学模型的建立
使用三维软件Solidworks建立混凝土布料机器人机械臂的三维模型,选用单缸六铰点的机构连接各节机械臂,如图1中(a)所示。一级节臂与二级节臂之间的连接机构主要有一级臂AC、变幅油缸AB、二力杆CE、弯连杆BED、二级臂OD等构件组成,如图 1中(b)所示。

图1 混凝土布料机器人三维模型
为了让所建的数学模型具有普遍适用性,固定一级节臂的位置为水平伸展状态,就可以方便计算一级节臂展开至任意角度时各个销轴的铰点位置。二级节臂以铰点O为圆心转动,二级节臂伸展为水平位置时为最大伸展行程,两个节臂的夹角为180°.节臂执行布料作业时,如图2所示,则有:
对各式联立求解的

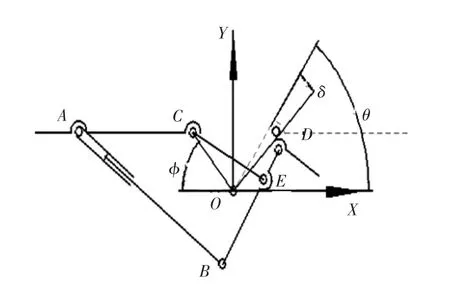
图2 混凝土布料机器人铰点结构图
2 铰点运动学优化
为了优化各级节臂间铰点的应力分布,分别对各级节臂进行模拟仿真作业过程,由于各级节臂在转动过程中只有变幅油缸提供动力,其他力均为定载荷,所以求解变幅油缸的最大力是优化铰点的主要方法,在这里以回转底座与一级节臂铰点为例说明,其他几部分分析优化方法相同。
如图3所示,为了优化回转底座与一级节臂铰点的最大应力采取几个步骤:第一步,二级节臂从水平位置顺时针转动至90°位置,二级节臂保持为竖直状态;第二步,一级节臂从水平位置顺时针转动至90°位置,一级节臂保持为竖直状态;第三步,二级臂由水平转动至竖直位置,二级臂保持竖直状态;第四步,三级臂逆时针转动180°,保持竖直状态;第五步,四级臂逆时针转动180°,保持竖直状态,考虑到实际作业过程设定整个动作过程为30 s.
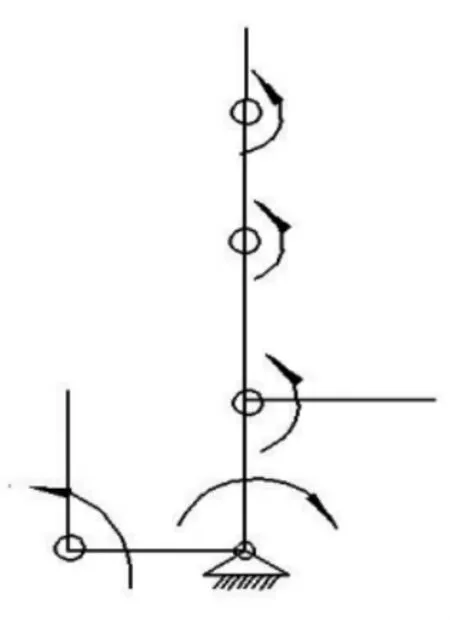
图3 混凝土布料臂仿真工况示意图
确定变量。如图4所示回转底座与一级节臂铰点结构简图,以回转底座与一级臂连杆中的弯杆的铰点为圆心O,建立坐标系。分别取A、B、C、D、E等点在X轴与Y轴投影得到各点在坐标系的坐标位置。取 AX、CX、DX、DY、LAC、LEC、LDB、LEB各线段作为优化的参考变量。
图4 混凝土布料机器人各节臂铰点结构简图
确定约束条件。各节臂、连杆的优化尺寸根据实际尺寸定义,在各机构连接仿真时不能发生干涉的前提下根据经验提前设定相关部件尺寸。节臂与连杆组成的结构简图中各尺寸需要满足三角形边长条件,即任意两边之和大于第三边。
确定优化目标。由于各级节臂在作业过程中只靠变幅油缸提供动力,其他力均忽略为定载荷,所以求解变幅油缸的最大力是优化铰点的主要方法。通过Motion模块仿真运动学解四种工况下变幅油缸的最小推杆力,最小推杆力所对应的铰点位置尺寸即为最优尺寸。
回转底座与一级节臂铰点设计算例。如图5所示为回转底座与一级节臂铰点系统建立设计算例,由上文可设定优化变量 AX、CX、DX、DY、LAC、LEC、LDB、LEB,各个尺寸在实际情况下均有可以优化的空间,设定传感器2为边长约束条件,传感器6最小化的条件是监控变幅油缸的最小行程。优化算例总共运行了66次,优化后一级臂变幅油缸优化后压力曲线变化如图6所示,最大油缸压力为161 212 N.优化后所得到的铰点位置参数对机械臂重新建模如图7所示。
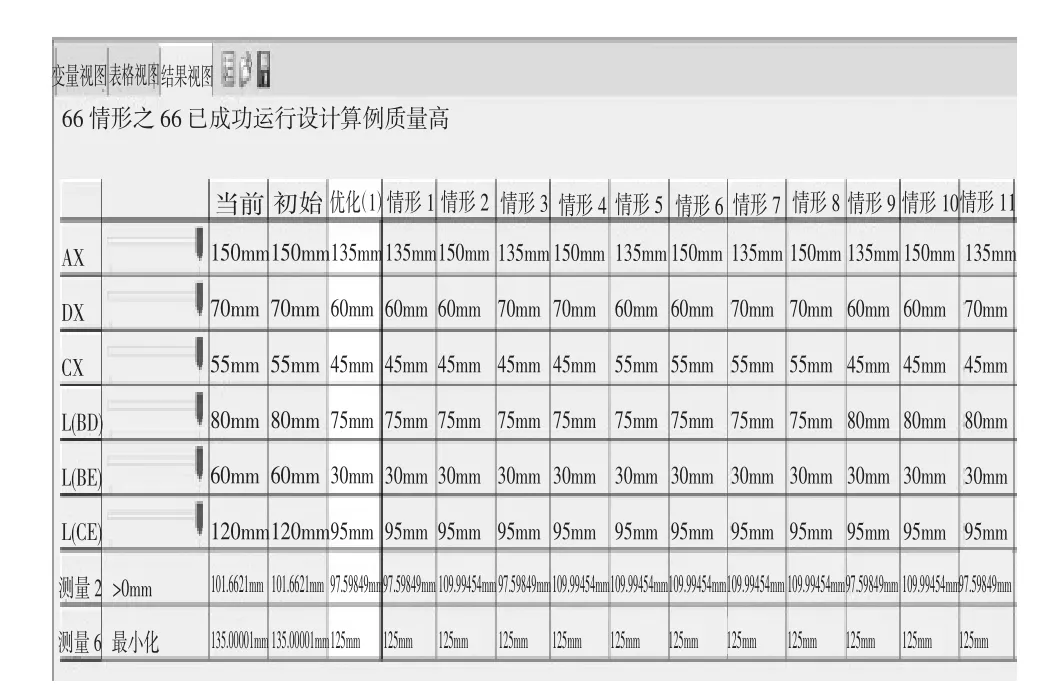
图5 回转底座与一级节臂铰点系统设计算例

图6 一级臂变幅油缸优化后压力曲线
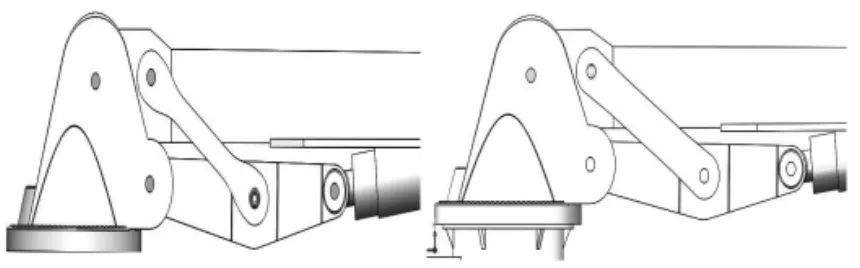
图7 回转底座与一级节臂铰点系统优化对比结构图
3 结论
建立机械臂铰点的数学模型,得出混凝土布料机器人各节臂铰点的结构简图,使用Solidworks Motion软件得到机械臂运动的仿真运动,通过优化设计,得出一级节臂铰点系统设计算例以及一级臂变幅油缸优化后的压力曲线,最终得出一级臂铰点系统的优化设计。各个节臂变幅油缸压力减小意味着变幅机构中机械臂上铰点处应力减小,这就大大的提高了机械臂系统的工作强度、使用寿命等。变幅油缸压力的减小也可以减小变幅油缸的尺寸,降低机械臂本体重量。
[1]李立顺.基于Solidworks Motion的随车吊主要工作装置仿真[J].科学技术与工程,2011(05):1070-1072.
[2]寇会民.基于SolidWorks Motion的压床机构运动仿真分析[J].科技创新与应用,2015(30):64-65.
[3]陈国炎.基于Solidworks Motion软件的机构运动仿真与分析[J].科技风,2014(01):125.
[4]苏 武,许智慧.泵车支腿及布料臂架型式分析[J].建筑机械技术与管理,2002(12):43-46.
Optimization Analysis of Hinge Point of Robot Arm of Concrete Distributing Robot
WANG Yun-lei1,QI Yu-ming1,DENG San-peng1,PENG Shu-ping1,ZHOU Wang-fa2
(1.Institute of Robotics and Intelligent Equipment,Tianjin University of Technology and Education,Tianjin 300222,China;2.Tianjin Bonus Intelligent Creative Robotics Technology Go.,Ltd.,Tianjin 300350,China)
The mechanical arm is an important component of the concrete distributing robot.The design of the hinge point of the manipulator determines the stability and accuracy of the concrete fabric.The 3D model of concrete material robot manipulator is established using the solidworks software,simulation and kinematics of the manipulator using solidworks motion,the hinge cylinder pressure curve between manipulator,and optimize the design of the hinge point.
mechanical arm;hinge point;kinematics;optimal design
TH132
A
1672-545X(2017)08-0019-02
2017-05-14
天津职业技术师范大学研究生创新基金(YC17-22);国家科技支撑计划课题(2015BAK06B04);天津市智能制造科技重大专项(15ZXZNGX00260);天津职业技术师范大学科技成果转化培育类项目(ZHPY1602);天津职业技术师范大学科技计划项目(KJ13-10)
王云磊(1993-),男,河北辛集人,硕士研究生,研究方向为智能机器人及其应用技术;祁宇明(1979-),湖北潜江人,工学博士,副教授,研究方向为机器人技术及应用;邓三鹏(1978-),男,湖北襄阻人,工学博士,教授,主要研究方向为机器人系统集成及应用技术。
