一种构造双馈风机虚拟惯性的自适应风功率跟踪策略
2017-10-13周凌辉谷志华彭晓涛
周凌辉,谷志华,彭晓涛
一种构造双馈风机虚拟惯性的自适应风功率跟踪策略
周凌辉1,谷志华2,彭晓涛2
(1.武汉船用电力推进装置研究所,武汉430064;2.武汉大学电气工程学院,武汉 430072)
风电机组的虚拟惯性对于改善风电系统的频率动态稳定性具有重要作用。本文首先分析了双馈风机转速控制器跟踪最大风功率的工作原理,在此基础上分析了最大风功率跟踪对并网风机的频率响应特性及对双馈风机常规附加虚拟惯性控制的影响。接着,研究了双馈风机基于最大风功率跟踪曲线线性调节的转速调节方法及其特点。同时利用转子运动方程推导了联系电网频率与双馈风机转子动能的虚拟惯性表达式,在此基础上提出了双馈风机基于风功率跟踪自适应调节的虚拟惯性控制策略。最后,通过仿真验证了该控制策略的有效性。
双馈感应发电机 最大风功率跟踪 虚拟惯性 频率响应
0 引言
本文在分析双馈风机跟踪最大风功率的转速控制原理及其对附加虚拟惯性控制影响的基础上,研究了双馈风机基于最大风功率跟踪曲线线性调节的转子调速方法,进而根据双馈风电机组的虚拟惯量表达式,提出了构建双馈风电机组虚拟惯性的风功率跟踪自适应控制策略。该控制策略能够根据频率偏差动态调整双馈风机的转子稳态转速,从而为虚拟惯性构建提供额外的转子动能。最后利用仿真验证了所提出虚拟惯性控制策略的合理有效性。
1 双馈风机跟踪最大风功率的转速控制
1.1 双馈风机跟踪最大风功率的转速控制原理
如图1所示,并网运行双馈风机的发电机转子通过齿轮箱与风机转子耦合,同时,转子的三相对称绕组通过双向PWM变流器RSC和GSC与电网连接,定子三相对称绕组则与电网直接连接。
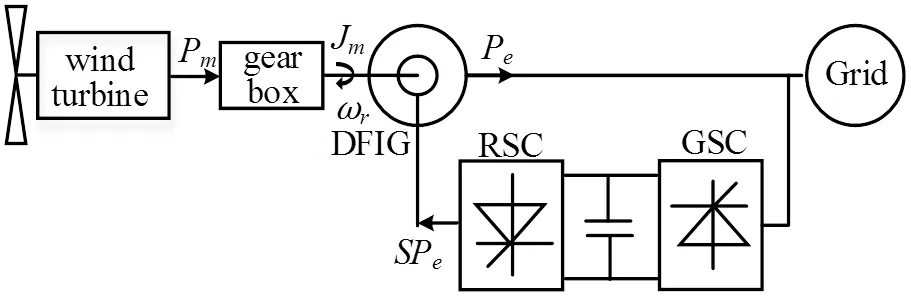
图1 DFIG的并网运行原理图
P为风机输入双馈感应发电机DFIG的机械功率;ω为DFIG的转子角速度;J为风电机组转子的固有机械转动惯量;=(ω-ω)/ ω,为ω与电网同步电角速度ω(ω=2πff为电网频率)的转差率;SP为双馈风机经双向变流器向DFIG转子三相绕组输入的转差频率功率。若忽略DFIG定子的电阻和磁链变化,同时将RSC矢量控制的坐标系的轴定向在定子磁链上,则由定子侧有功、无功和电磁转矩方程可知,DFIG可通过转子电流的i分量控制定子侧电磁功率P,通过转子电流的i分量控制定子侧无功,进而实现风电机组有功无功的解耦控制[23]。
正常运行时,功率外环控制中的有功指令由图2所示双馈风机的转速控制器按照最大风功率跟踪控制确定。图2所示转速控制包括两个过程:一个是P指令的产生过程,该控制利用实测P根据最大风功率跟踪曲线的拟合函数ω=AP+BP+、ω≤ω≤ω确定转速参考值ω,通过ω和实际反馈转速ω的比较,经电磁转矩PI调节器确定消除ω和ω偏差,产生电磁功率指令P;另一个是i的产生过程,该控制利用指令P和实测P的比较偏差,经电磁功率PI调节器确定使P跟踪P的i。
1.2 双馈风机跟踪最大风功率的转速调节过程
双馈风机最大风功率跟踪的目标就是通过调节i使P趋于P。其利用转速控制器实现最大风功率跟踪的过程可由图3分析。图中,ω和ω分别为双馈风机并网运行转速调节范围的下限和上限;P和P分别为最大风功率跟踪曲线拟合函数中对应ω和ω的P取值下限和上限;P为风电机组的额定输出功率。曲线为风电机组在额定风速内实现最大风功率跟踪的运行区间。曲线上的、、分别风电机组在风速v3、v2和v1下跟踪最大风功率的稳定运行点。

图2 双馈风机跟踪最大风功率的转速控制原理

假设风机初始最优运行点为,若风速突然由v2改变为v1,则风机输出机械功率将由曲线v2的点风功率P突变为曲线v1的点风功率P。由于P大于风机在初始运行点b的电磁功率P,因此转速ω增加,并大于由P依据拟合函数确定的转速指令ω=ω。ω和ω的偏差将进一步引起P增加,并通过调节i增加P,进而使P趋于P。由于双馈风机在v1曲线段输入的P大于最大风功率跟踪曲线段所对应P,因此,转速控制器沿着曲线不断增大风机的P和ω,直至使P等于P的运行点处。同理可分析风速由v2改变为v3时,风电机组由稳定运行点改变至点的最大风功率跟踪过程。
此外,当风速下降使ω小于ω,风机的最大风功率跟踪将运行在曲线所示的低风速恒转速区间,此时ω恒等于ω,风电机组通过降低P使ω趋于ω;当风速上升使ω大于ω,风机将运行在曲线所示的高风速恒转速区间,此区间ω恒等于ω,风机通过增加P使ω趋于ω,当风速增大到使P≥P时,为了能继续使ω趋于ω,且P≤P,需要通过调节桨距角以减小风功率输入。
2 最大风功率跟踪对双馈风机频率响应的影响
双馈风机并网后,当忽略同步发电机转子的阻尼作用,同步发电机的频率动态特性和风电系统的有功平衡可由式(1)表示:

式中,P、P和H分别为同步发电机的机械功率、电磁功率和惯量常数;n、n分别为风电系统中同步发电机和风电机组的并网数量;P为风机输出的电磁功率;∑P和∑P分别表示风电系统的有功需求和有功损耗。
若不考虑同步发电机的一次调频,当系统有功需求变化△P,则由式(1)可知:

式中,△P为同步发电机的电磁功率增量;△P为风机的电磁功率增量。对式(2-1)积分可得有功需求变化所导致的系统频率偏差:
(3)
依据式(3)可知,随着风电渗透率的增加,系统中同步发电机的并网数量n下降,系统惯性时间常数总和也将下降。同时,由风机的最大风功率跟踪原理可知,其输出功率P由最大风功率跟踪曲线与风功率曲线的交点确定,与电网频率的变化无关。因此当f变化时,由于△P=0,频率偏差f将随着风电渗透率的增加而增大。

图4 双馈风电机组的附加虚拟惯性控制
若按图4在最大风功率跟踪指令值上附加与df/成正比的有功调节指令△P,由式(1)和式(3)分析可知该附加有功调节指令将使风机提供阻尼系统频率变化的虚拟惯性。但由最大风功率跟踪的转速控制原理可知,当f变化,附加虚拟惯性控制虽然会改变P输出,并使ω改变,但变化的P又将使ω向ω改变的反方向逐渐变化,则ω与ω之间的增大偏差将反作用P,使其变化减小并逐渐恢复至初始状态,从而影响用于改善风机频率响应特性的调频有功输出。图5通过仿真图4所示并网双馈风机在△P等于正负0.5MW阶跃指令作用下的电磁功率和转速动态响应过程,验证了最大风功率跟踪对附加虚拟惯性控制的制约作用。

3 基于自适应跟踪风功率的虚拟惯性控制
3.1 最大风功率跟踪曲线的线性调节
对图3所示最大风功率跟踪曲线进行比例调节:若比例调节系数满足βx≥>1时,则曲线将会改变为图6中;若比例调节系数满足:

β≤<1,则曲线将会改变为图6中。β是使曲线与线段相交的最小比例调节值;βx则是使曲线与线段相交且与线段无交点的最大比例调节值。如果在最大风功率跟踪稳定运行点c,将最大风功率跟踪曲线通过比例调节改变为曲线,则转速控制器的ω将突然改变为ω。由于ω小于实际转速ω,因此它们的比较偏差将使P突然增加,从而使转速控制器增加P,以使ω增加。同时,由于逐渐增大的P大于曲线对应的风功率,因此ω会由ω不断下降,这个过程中P随之减小,当P减小到使P大于P,在转速控制器的作用下,风机将开始逐渐减小P。由于电磁功率大于风功率,所以持续下降的ω将使转速控制器持续减小电磁功率直至点,此时,ω=ω,P=P,风机稳定运行在点。同理,如果在最优运行点c处,最大风功率跟踪曲线通过比例调节改变为,则转速控制器的ω将突然改变为ω。由于ω大于实际转速ω,因此它们的比较偏差将使Peref突然减小,从而使得转速控制器减小P,以使ω减小。同时,由于逐渐减小的P大于曲线对应的风功率,因此ω会由ω沿曲线上升,这个过程中P不断增加,当P增加到使P小于P,在转速控制器的作用下,风机将开始逐渐增加P。由于电磁功率小于风功率,所以持续上升的ω将使转速控制器持续增加电磁功率直至点,此时,ω=ω,P=P,风电机组稳定运行在点。
设ω=ω,P= P,对上述调节过程的运行点进行分析可知,稳定运行点和处的转速和电磁功率分别满足:

式中,x和x为方程AP+BP+=0的根。设P=P-ε,ω=ω+ω,则由式(4)可得比例系数β表达式:
(5)
式中,ε是调速前后两个稳态运行点之间电磁功率偏差。考虑风电机组风功率在一定转速范围内的较小渐变特点,因此若忽略转速变化ω内的功率偏差ε,则可得β近似表达式:

将式(6)和P=P-ε分别代入式(4)可得:
因此,利用β近似表达式进行转速调节所产生的调速误差ε为:
依照个体选择概率对所有个体进行排序,根据精英保留法直接复制遗传选择概率最优的个体,产生符合[0,1]范围的随机数与重组概率Pc比较。当前研究多用概率设置算子设置重组概率[18],过度保护了高适应度个体。本文基于自适应原理改进概率设置算子,将高适应度个体赋予较高的重组概率,以遗传更多高质量基因:

式(8)表明,利用式(6)对最大风功率跟踪曲线进行调节,可在保证风电机组稳定运行的前提下实现调速。虽然调速存在误差,但随着比例调节系数接近1,由于调速前后稳态运行点之间的功率偏差减小,因此调速误差也将减小。此外,即使调速前后稳态运行点间的功率偏差较大,比例调节系数的减小也将起到衰减转速调节误差的作用。同理可分析稳态运行点。

图7通过仿真图2所示并网双馈风机在=1.05和=0.95时的电磁功率和转速动态响应过程,验证了上述双馈风机对线性调节最大风功率跟踪曲线的响应分析。对比图7所示双馈风机电磁功率和转速的初始稳态和最终稳态可知,即使风速不变,由于最大风功率跟踪曲线发生变化,因此双馈风机的稳定运行点发生改变,不仅使风机的稳定转速和输出功率发生改变,而且对比图5的输出功率暂态响应过程可知,系统频率变化时,通过线性调节最大风功率曲线能够更好改善双馈风机的频率响应特性。
3.2 构建虚拟惯性的自适应风功率跟踪控制策略
若忽略图1中风机和DFIG间传动齿轮的功率损耗,则由动力学原理可得双馈风电机组的转子运动方程:

对上式积分可得:
(10)
式中,t和t分别是积分结束和起始时刻。虽然双馈风电机组转子的ω与电网ω被其双向PWM变流器解耦,但是通过假设风电机组的虚拟转动惯量J,可建立系统频率与其转子动能的联系,即:

假设t为虚拟转动惯量控制的起始时刻,t为虚拟转动惯量控制的当前时刻,对式(11)进行积分,则依据式(10)可得:
(12)
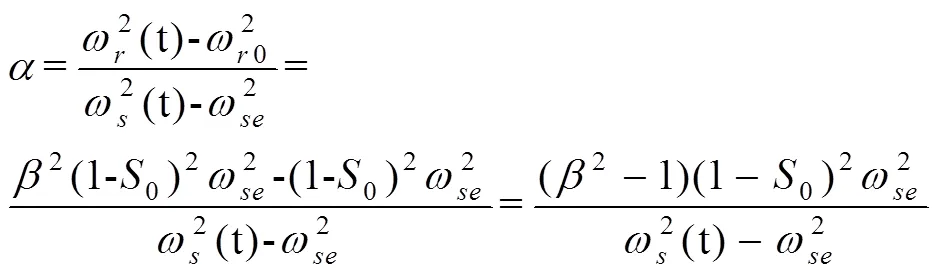
令J/J=,则由式(12)可得当前虚拟转动惯量控制的风机转速调节目标:

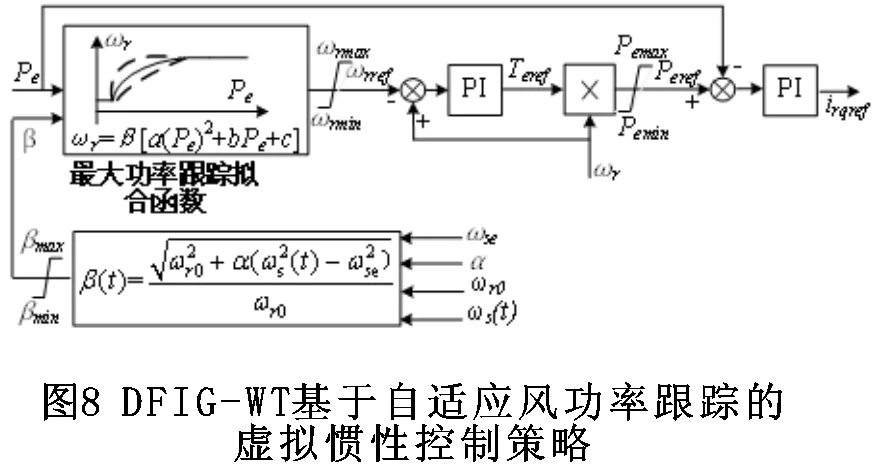
式中,ω(t)和ω(t)分别为虚拟转动惯量控制初始时刻的风电系统同步电角速度和风电机组转子角速度。若令ω(t)= ω、ω(t)= ω,同时令当前检测的电网同步电角速度ω(t)= ω(t),则可确定当前虚拟转动惯量控制的风机转速调节目标值ω(t),进而依据式(6)可得实现当前虚拟转动惯量控制的最大风功率跟踪曲线比例调节系数:
(14)
考虑系统频率向上波动和向下波动情况相似,且向上波动的范围小于向下波动,因此可通过分析频率向下波动的情况,确定式中的取值范围。
将J=αJ代入式(12)可得:
进一步整理式(15)可得:
(16)
一般电力系统频率安全运行下限为48Hz,在调频过程中同步发电机的转速变化范围通常为0.96~1p.u.,则-0.0392ω≤ω(t)-ω≤0。忽略初始转差率S,且为了减小调速误差令1≥,则依据式(16)可得取值范围为0≤2.42。
基于上述分析,当不考虑风功率变化,由式(11)可知,通过对最大风功率跟踪曲线进行比例调节,能够通过调节双馈风机转速改变电磁功率输出,进而为双馈风机提供构建频率惯性的率惯性特性的调频有功。由此,本文提出了图8所示的双馈风机基于风功率跟踪自适应调节的虚拟惯性控制策略。由图可见,该策略通过检测当前系统同步电角速度,根据风电机组转子初始角速度和式(14)确定修正最大风功率跟踪曲线的比例调节系数得以实现。
4 仿真分析
利用图9所示仿真模型对比研究G1不采用虚拟惯性控制、采用附加虚拟惯性控制、采用基于自适应风功率跟踪的虚拟惯性控制时,系统状态对频率变化的动态响应。图中,双馈风机G1为100 MW风电场,分别与额定功率200MW的同步发电机G2和额定功率150 MW的同步发电机G3连接,L1为100 MW有功负荷,可经开关CB1进行投切控制,L2为200MW有功负荷。仿真中,风电场风速设为9 m/s,双馈风机最大风功率跟踪曲线拟合公式为:ω=0.8669P+1.916P+0.3298、ω=0.67ω=1.5,P=20MW、P=100MW,图8中=2,图4中k=50,通过在2s时刻操作开关CB1接入负荷L1和切除L1设置系统频率扰动。两种频率扰动下的系统状态响应如图10和图11所示。

对比图10(a)和图11(a)的可知,采用所提虚拟惯性控制,发生负荷增加扰动时,频率的最大下降幅度由无惯性控制时的49.87Hz上升到49.93Hz,降低幅度减少46.15%;切除负荷扰动时,频率的最大上升速幅度由无惯性控制的50.14Hz下降到50.08 Hz,上升幅度减少42.86%。
同时,对比图中系统频率在两种虚拟惯性控制作用下的响应可知,所提虚拟惯性控制能够更好改善系统的频率惯性,减小系统频率偏差幅度。对比图10(b)、图10(c)和图11(b)、图11(c)可知,当双馈风机G1采用无虚拟惯性控制时,风电场对系统频率变化几乎没有响应;当采用虚拟惯性控制后,对于系统频率扰动可以通过调节转子转速,存储或释放转子动能为系统提供一定的调频有功支持,有效减小系统的频率变化。

注:实线(黑色)-无惯性;虚线(蓝色)-附加虚拟惯性控制; 点化线(红色)-风功率跟踪自适应调节。
图10(d)、图10(e)和图11(d)、图11(e)描述了风电并网系统中同步发电机G2和G3的有功动态调节过程。如图,当风电机组G1不采用虚拟惯性控制,由于G1对系统频率变化不能提供有功支持,并且同步发电机G2和G3的调速器调节较慢,因此负荷的突然变化将导致G2和G3电磁功率的迅速变化,进而使同步发电机转子的转速迅速发生变化并导致系统频率的快速变化。而当G1采用虚拟惯性控制时,对于负荷变化引起的系统频率变化,G1通过虚拟惯性控制调节转子速度,利用转子动能的储存或释放补偿系统有功缺额,因此G2和G3电磁功率的变化在频率变化初期有所减小,进而减小了同步发电机转子的转速变化并使系统频率变化减小。同时,对比G1转子转速、电磁功率和G2、G3电磁功率在两种虚拟惯性控制作用下的响应可知,所提虚拟惯性控制由于克服了最大风功率跟踪对风机稳定运行点的约束,因此较附加虚拟惯性控制能够实现更大范围的转速调节和阻尼频率变化的有功输出。
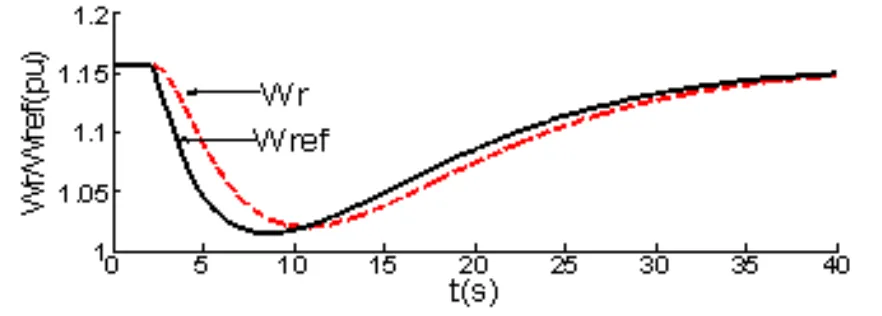
(a)增加L 1负荷时的转子转速及其指令值
(b)切除L 1负荷时的转子转速及其指令值

上述仿真中ω的指令值、实际值和最大风功率跟踪曲线比例调节系数的变化过程如图12所示。图12(c)仿真结果表明,与频率偏差变化保持同步,当频率偏差不为零,也将偏离稳态值1,若>1则转速上升、功率减小,若<1则转速下降、功率增加,当频率恢复初始稳态值,则=1,风电机组恢复最大风功率跟踪运行方式。同时,的变化范围和取值验证了所提出参数设计方法的合理性。图12(a)、(b)的仿真结果则表明所提调速方法存在调速误差,并且调速误差随着比例调节系数的增大而增加、减小而减少,因此可通过参数的选择,适当限制比例调节系数的变化范围,进而降低调速误差的范围。
5 结论
本文从充分利用双馈风机转子动能改善其频率响应特性的角度出发,研究了双馈风机的非最大风功率跟踪的调速方法,并基于此提出了双馈风机基于自适应风功率跟踪的虚拟惯性控制策略。通过研究和仿真得到如下结论:
1)风电渗透率的增加,电网的频率惯性将下降,暂态响应的频率偏差将增大;
2)所研究虚拟惯性控制策略有效克服了最大风功率跟踪对双馈风机附加虚拟惯性控制的影响,并且能够在改变风机稳定运行点的前提下,通过大范围调节转子速度构建风机的虚拟转动惯量,从而使风电机组具备响应频率变化的虚拟惯性;
3)所研究虚拟惯性控制策略具有控制器结构简单、易于工程实现、控制器参数少且便于设计的特点。
[1] J. Ekanayake , N. Jenkins. Comparison of the response of doubly fedand fixed-speed induction generator wind turbines to changes in networkfrequency[J]. IEEE transaction on Energy Convers. 2004,19(4):800-802.
[2] G. Lalor, A. Mullane, and M. O’Malley.Frequency control and windturbine technologies[J]. IEEE Transactions on Power Systems, 2005,20(4):905-1913.
[3] Kayikci, M.; Milanović, J.V..Dynamic Contribution of DFIG-based wind plants to system frequency disturbances[J]. IEEE Transactions on Power Systems, 2009, 24(2):859-867.
An Adaptive Wind Power Tracking Strategy for Constructing Virtual Inertia of Doubly-fed Induction Generator-based Wind Turbine
Zhou Linghui1, Gu Zhihua2, Peng Xiaotao2
(1.Wuhan Institute of Marine Electric Propulsion, Wuhan 430064,China; 2.School of Electrical Engineering, Wuhan University, Wuhan 430072, China)
TM614
A
1003-4862(2017)03-0051-07
2016-09-15
周凌辉(1977-),男,高级工程师。研究方向:船舶电力推进、电力电子技术。