基于无速度传感器的船舶交流推进电机模糊直接转矩控制策略
2017-10-13郭隆军俞万能田庆元于洪亮张文斌
郭隆军,俞万能,田庆元,于洪亮,张文斌
基于无速度传感器的船舶交流推进电机模糊直接转矩控制策略
郭隆军,俞万能,田庆元,于洪亮,张文斌
(集美大学轮机工程学院,福建厦门 361021)
基于直接转矩控制的普通电力推进船在低速航行时,船舶推进电机的转矩产生明显的周期性振动,为改善此问题,本文将模糊控制逻辑引入到推进电机调速系统中;同时针对电力推进船上速度传感器存在的维修、安装不方便等问题,引入无速度传感器技术。通过Matlab对改进系统进行仿真,结果表明改进后推进电机能够有效的减小转矩脉动,辨识后的转速能有效的跟踪系统的实际转速。
直接转矩控制 模糊逻辑 无速度传感器
0 引言
在船舶上,电力推进相比于直接推进方式具有结构紧凑、快速起停和噪音小等优点[1]。电力推进船根据电流的不同分为直流、交流以及直流交流相结合电力推进,由于直流推进电机构成相对复杂、调速范围小、体积较大、价格贵、输出功率小等缺点,逐步被交流推进电机所取代[2-3]。在船舶上加设速度传感器会使船舶造价提高、日常检修困难,增加整个系统的复杂度,而且还受潮湿、高温、振动等现场环境的限制,故无速度传感器得以应用[4]。直接转矩控制技术是直接将推进电机的转矩作为被控量来调节船舶的航速,因其良好的控制效果在近年来得到快速的发展[5]。但存在船舶在海域航行时转矩会出现明显的周期性振动的缺点[6],特别是当船舶在靠港时,船舶航速较低,转矩振动更加严重[7-11]。为改善此问题,国内外学者提出不同解决方法。文献[12]采用多位滞环比较器,文献[13]应用预测电压矢量法,有的文献提出占空比控制技术,都获得了同时减小转矩和磁链脉动的优良性能。
本文以船舶三相异步交流推进电机作为研究对象,将模糊控制逻辑引用到船舶调速控制上,以此来改善船舶调速性能。并采用模型参考自适应(MRAS)来对推进电机的实际转速进行识别。仿真结果表明这种调速控制方法用于电力推进电机上能有效抑制转矩脉动,速度传感器能够很好地进行转速辨识,对电力推进船的正常航行有一定的理论研究意义与工程应用价值。
1 模糊直接转矩控制原理
在推进电机定子静止坐标系下,将电机定子电流、电压的测量值进行坐标变换,由交流电机的基本理论可以推导出在两相静止坐标系下推进电机的定子磁链值以及转矩大小。对磁链进行矢量分解得到磁链的幅值和在此时刻的扇区位置。将由矢量分解得到的磁链幅值和转矩分别与推进电机的给定值相减得到两者的偏差量。两个偏差量和扇区位置作为三个变量一起输入到模糊控制器中。在控制器内部经过变量模糊化、逻辑判断、对模糊变量解模糊化后得到逆变器的开关状态,以此来调整定子磁链的旋转速度。电机内电磁场属于相互耦合的关系,根据电机内电磁场的关系可以知改变定子磁场的旋转速度可以减小或增大与电机转子磁场的相对转速,进而控制船舶推进电机的转矩大小。其结构如图1所示。

图1 模糊直接转矩控制总体结构图
2 模糊控制器的设计
2.1 选取模糊量
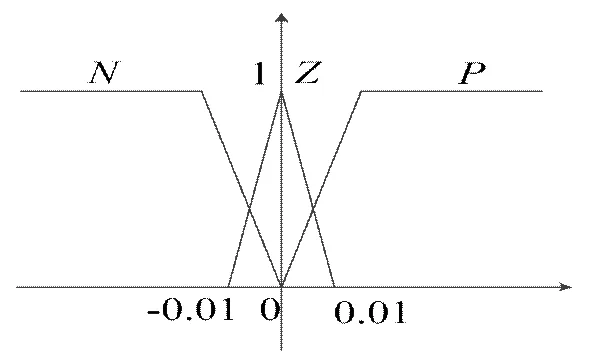
图2 的隶属度函数
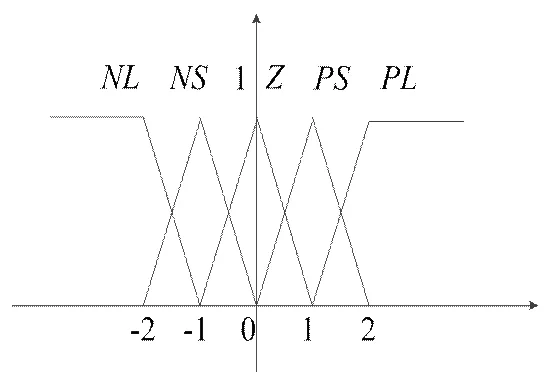
图3 的隶属度函数
经过解模糊之后,将逆变器的开关状态作为输出。把三个开关量输出全部表示为一个清晰的数字量输出,考虑到输出变量为离散值,不用对其模糊子集进行细化,其论域为{0,1,2,3,4,5,6,7}。输出隶属函数如图5所示。
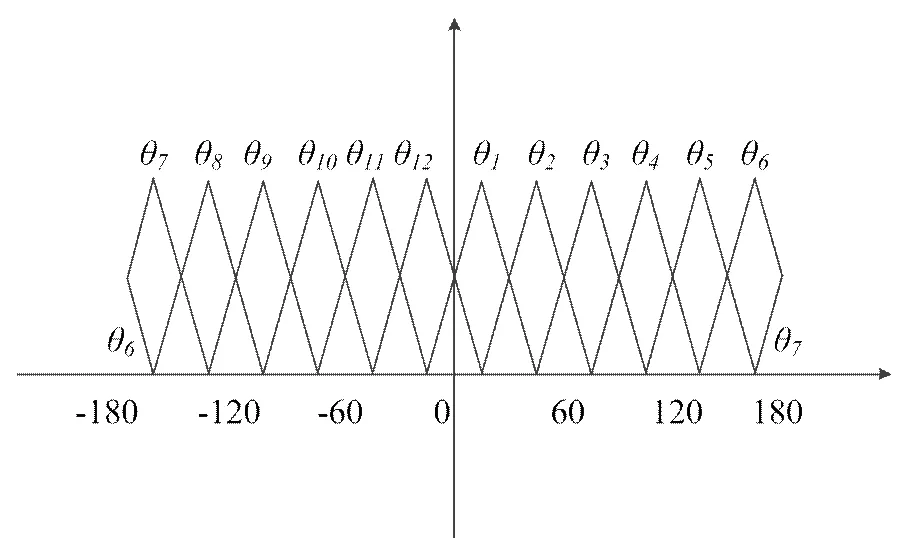
图4 的隶属度函数图
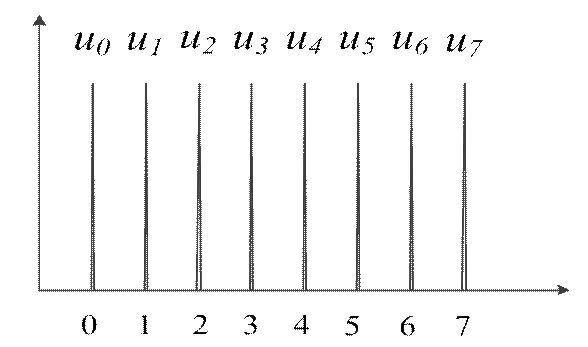
图5 开关量的隶属函数
2.2 建立模糊控制规则
模糊规则是依据两个方面制定的,一个是已有的一些经验,另一个是理论分析逆变器开关状态。下面分析当磁链处于某一扇区时,不同地电压矢量对推进电机磁链与转矩的影响,下图6所示的是电压空间矢量图及扇区位置。当磁链在下图所示的位置时,、、使磁链幅值增大,、、使磁链幅值减少。同时、、增大转矩,、、减小转矩,、不改变转矩大小。若磁链在此位置需要减小磁链幅值,并使转矩减小,可以选择、。在实际控制中,有些电压矢量的控制效果是类似的,因此我们要选择最优的电压矢量。根据以上的分析方法可以推得定子磁链在另外十一个区间的情况,最终可得到180条规则的模糊规则。具体规则如表1所示。
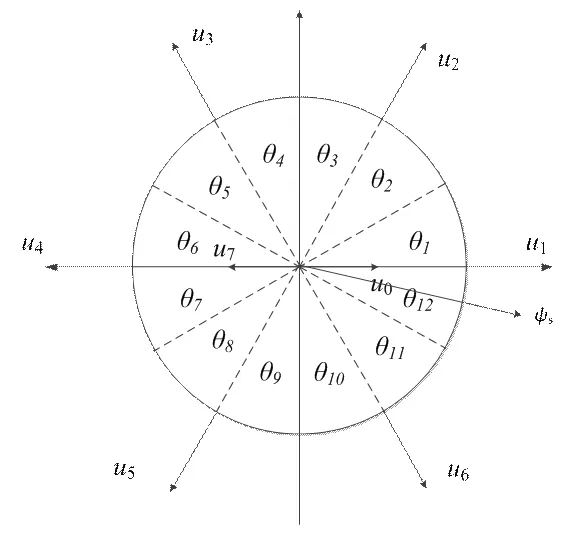
图6 空间电压矢量图
2.3 模糊规则推理
本文采用Mamdani型乘法推理。控制中采用的模糊推理规则语言为:ifandandthen。开关量输出的隶属函数为:、、和分别为、、和的隶属度;“”为 “取小”算子;max表示当取隶属度最大时所对应的开关状态输出。
3 电机转速估算方法
无速度传感器的发展来自于对于系统的稳定性的要求及船舶的特殊环境的限制。不依赖于硬件而是直接根据所检测的电流值、电压值等来计算出船舶推进电机的实际转速。
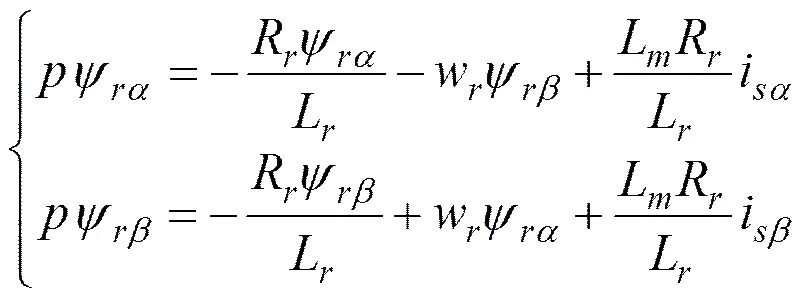
模型参考自适应(MRAS)是以一个模型为标准,通过调节另一模型来调整的参数的一种自适应控制。本文将含转速的电流模型作为可调模型,不含转速的电压模型作为参考模型,输出的转子磁链误差作为比例积分自适应率的输入,误差为零时证明估计转速与实际转速一致。
异步电机在坐标系下电压模型
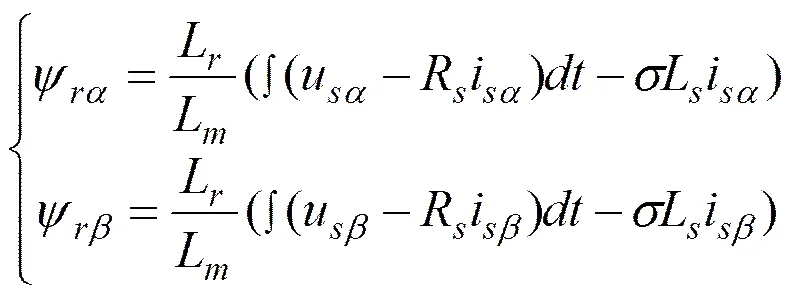
u, u——定子电压在坐标系下轴和轴的分量,V;
式中,
广义误差为:

将得到的广义误差输入到PI调节器中,实现估计转速逼近实际转速
4 仿真对比
本文根据船用推进电机的数学模型,在Matlab/Smulink对加入模糊控制逻辑的直接转矩控制系统进行仿真,并与原来未加入模糊控制逻辑的仿真结果进行对比。
仿真所用到的参数为Matlab/Smulink自带的电机参数,具体如下:P=150 kW,=460 V,=50 Hz,=0.01485,=0.009295 Ω,=0.003027 H,=0.003027 H,=0.01046 H,=2,=3.1,在异步电机空载条件下,0~0.5 s转速设为200 r/min.0.5~1 s转速设定为500 r/min。在相同条件下,分别对传统直接转矩控制系统和模糊直接转矩控制系统进行仿真,其结果如图7、图8所示。
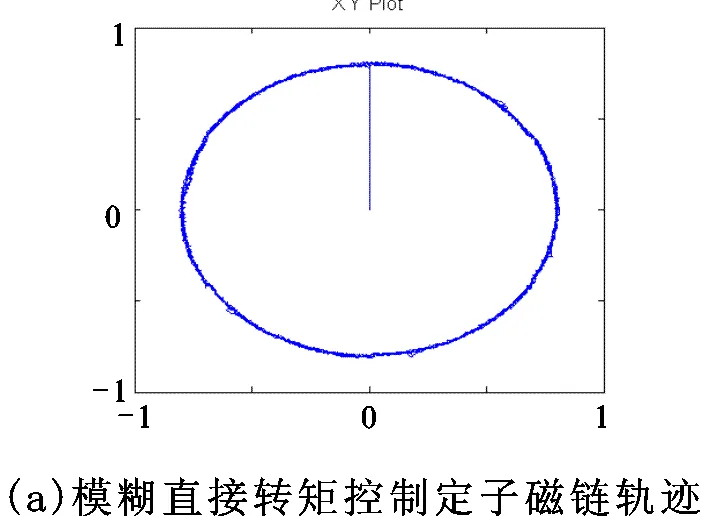
图7为2种系统的定子磁链轨迹曲线,同时在2种控制系统中取0.5~0.8 s时间段的定子磁链值进行对比。传统直接转矩控制中磁链脉动为0.018 Wb,而模糊直接转矩控制定子磁链脉动为0.01 Wb,因此基于模糊控制下的定子磁链脉动更小。
(a)基于模糊控制下转矩仿真曲线
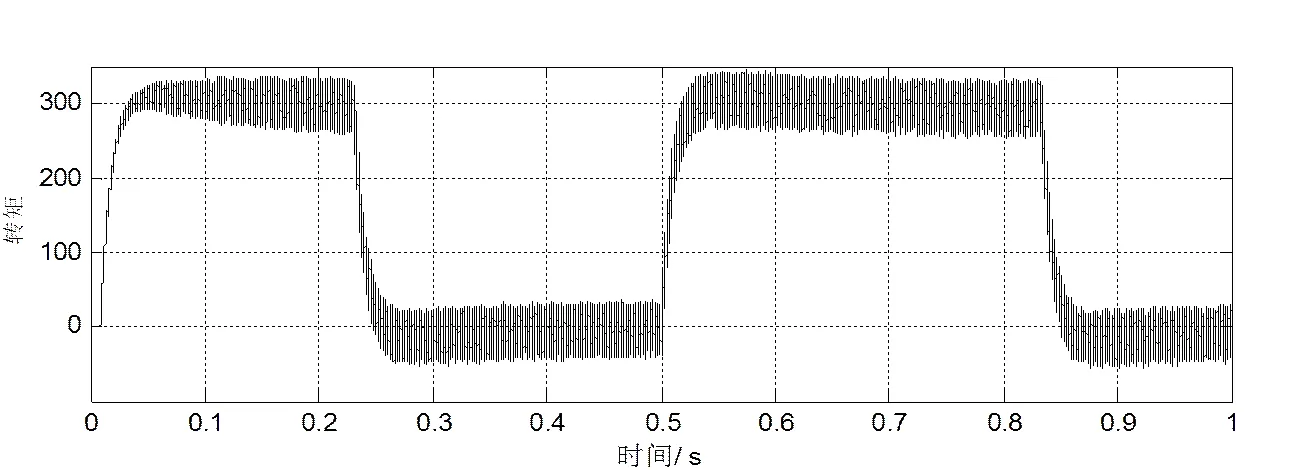
(b)传统控制下转矩仿真曲线

(a)实际转速与估算转速曲线
(b)局部放大图
图9 实际转速与估算转速曲线
图8为2种系统的转矩曲线。与定子磁链比较方法相同,取0.5~0.8 s时间段的转矩脉动作为比较,传统直接转矩控制转矩脉动为40,模糊直接转矩控制转矩脉动为20。
图9为MRAS转速辨识得到的转速曲线,图9中黑色曲线表示MRAS转速辨识曲线,红色曲线为电机实际转速曲线,通过图9(a)可以看出估算转速和实际转速基本重合,将图9(a)局部放大,截取0.2~0.4 s的转速曲线,如图9(b)所示,可以计算速度观测值误差为1%。说明了本文MRAS的转速辨识模型能很好的进行转速的识别。
5 结论
本文针对电力推进船在低航速下推进电机转矩脉动的缺点,引入模糊理论。Matlab/Simulink仿真结果表明加入模糊控制逻辑后推进电机的转矩脉动与磁链脉动比原来的更小,控制性能得到明显提高。将基于MRAS的无速度传感器技术应用到船舶推进电机中,可以很好的对推进电机转速进行识别。
[1] 栾胜利. 船舶电力推进技术的发展[J]. 船电技术, 2009,(04):46-49.
[2] 朱炜. 浅谈舰船综合电力推进系统及其相关技术[J]. 船电技术, 2014,(12):14-18.
[3] 张军贤. 基于永磁同步电机的船舶电力推进及其控制策略优化研究[D]. 集美大学, 2015.
[4] 张爱民. 无速度传感器感应电机控制系统转速辨识方法研究[J]. 现代电子技术, 2011,(06):208-210.
[5] 袁登科,张逸成,姚勇涛. PMSM直接转矩控制调速系统中转矩增量分析[J]. 机电一体化, 2010,(03):50-55.
[6] 张爱玲,王震宇,杨文杰. 直接转矩控制系统中减小转矩脉动方案的比较[J]. 电机与控制学报, 2008,(05):566-570.
[7] YanpingXu, YanruZhong. Fuzzy stator Resistance estimator for a direct torque controlled interior permanent magnet synchronous motor[C].Proceedings of the Eighth International Conference on Electrical Machines and Systems(Volume Ⅰ), 2005.
[8] M.FazRahman,Colin Grantham. A new scheme to direct torque control of interior permanent magnet synchronous machine drives for constant inverter switching frequency and low torque ripple[C].Conference Proceedings of CES/IEEE 5th International Power Electronics and Motion Control Conference(Volume 3), 2006.
[9] 林新涵. 异步电机直接转矩控制系统的研究[D]. 浙江理工大学, 2014.
[10] 林琪, 李智强. 我国直接转矩控制技术低速性能研究综述[J]. 科技信息, 2008,29:7-8.
[11] 王敏, 陈芬, 李想, 潘永春. 交流调速直接转矩控制技术研究综述[J]. 自动化与仪器仪表, 2016, (01):1-3.
[12] F. Chen and M. W. Dunnigan, Comparative study of a sliding-mode observer and Kalman filters for full state estimation in an induction machine. IEE Proceedings - Electric Power Applications, 2002, 149(1):53-64.
[13] 王磊, 王京, 张勇军. 基于定子参考电压矢量预测的SVPWM直接转矩控制研究[J]. 电气传动, 2010, (03): 36-39.
Control Strategy of Fuzzy Direct Torque for Ship Propulsion Motor Based on Speed Sensorless
Guo Longjun, Yu Wanneng, Tian Qingyuan, Yu Hongliang, Zhang Wenbin
(Marine Engineering Institute, Jimei University, Xiamen 361021, Fujian, China)
TM743
A
1003-4862(2017)07-0015-05
2017-03-25
国家自然科学基金(51679106),交通部应用基础科研项目(2015329815160),福建省科技计划项目资助(2015Y0038/2016H6017),厦门市科技计划项目(3502Z20151231)
郭隆军(1992-),男,硕士研究生。研究方向:船舶电力推进及其控制。