推进制动控制和制动电阻优化设计研究
2017-10-13夏星煜
夏星煜,高 琛
推进制动控制和制动电阻优化设计研究
夏星煜1,高 琛2
(1.武汉船用电力推进装置研究所,武汉 430064;2.国网湖北省电力公司检修公司,湖北宜昌 443000)
本文通过对船舶电力推进制动控制的研究,介绍了一种能耗制动方式;并通过理论分析,阐述了其能耗制动电路的可行性和实用性。本文还基于能耗制动电路的分析,对制动电阻的参数优化进行了理论分析计算,最后通过实船数据搭建起了制动过程的仿真模型,并对于不同制动电阻的模型分别进行仿真分析,证明了制动电阻的优化能降低实船对推进制动控制系统的参数要求。
推进制动控制 泵升电压 制动电阻
0 引言
利用船舶上的发电装置所产生的电能驱动船舶运动的方式称为电力推进方式。电力推进系统由于其优异的性能,现已成为最具发展潜力的船舶推进系统。
制动性能是船舶推进系统的一项重要指标,制动方式主要有两种[4]:机械制动和电气制动。机械制动的原理比较简单,主要是利用摩擦力进行制动,但是其制动装置体积大,停车的准确性低,本文不做讨论。电气制动是控制电动机参数,使其产生与转速方向相反的电磁转矩,来实现制动。在对制动准确性要求较高的场合,多采用这种方式。
电气制动又分为能耗制动和回馈制动[5],这两种方法对控制的要求较高,考虑到实际船舶运行并不需要频繁的制动,本文提出一种实用的能耗制动方法。
1 系统能耗制动方式的研究
1.1泵升电压的产生与抑制
当系统出于制动状态时,在文献[3]中,其所储存的机械能会通过机电转换为电能,除开一小部分由于电机内部损耗的能量,大部分能量则通过变频器中的开关器件模块回归到变频器的直流母线侧,此时逆变单元处于能量回流状态。
目前主流的交直交电压源型变频器,前段电压由于有电容钳位不会突变,且整流模块中的二极管只能单相导通,所以直流母线侧的电能无法回馈给电网,只能储存在滤波电容中,从而导致直流母线侧电压升高,并会造成电荷的积累。
在系统缓慢制动的情况下,电容电压上升的并不明显,但当系统紧急制动时,短时间会有大量的能量回馈,泵升电压此时较为明显,严重情况可能会烧毁整个变频器,使整个电力推进系统处于瘫痪状态。因此,为了保证系统能可靠有效地应对各种极端工况,我们必须要想办法减小其泵升电压,以达到变频器直流母线侧的工作范围要求。
为了避免泵升电压过高而导致设备的损坏,我们必须想办法把电容器上所储存的能量消耗掉,在其电容器两端并联一个电阻能有效地消耗电容上的电能,即采用能耗电路制动方式[1],在直流母线之间搭建与电容器并联的能耗电阻,构成能耗放电电路。原理如图1所示,当系统制动时,电机回馈电能给变频器,电能到直流母线单元的电容器储存,直流母线电压升高,如果在此时将开关器件IGBT导通,则制动电阻与电容两端并联,能量通过电阻发热损耗,从而能有效地降低变频器直流母线侧电压,达到降低泵升电压的目的。

1.2能耗电阻功能参数
能耗电阻的参数主要包括阻值和功率。文献[2]由欧姆定律可知:在电压一定的情况下,阻值越小,电流越大,流过PMSM的电流也就越大。如果流过PMSM的电流越大,制动过程中的制动力矩越大;反之则情况相反。制动转矩过大,则制动周期会过短,电阻的发热现象就会很严重,制动转矩过小,则制动周期就过长,船舶将得不到有效的停车,造成很大的安全隐患。
为了使船舶能够平稳降速,设计时需要设置适当的减速时间和合适的能耗电阻。
1.3制动电阻的优化设计
在此过程中,螺旋桨及电动机转子由于惯性驱动电动机发电,则有以下能量转换方程:

(2)
(4)
根据刚体定轴转动的动量矩定理有:

(6)
又因为:

此时电阻消耗功率:
(8)

(11)
将10、11带入4可得:

根据平方公式得:
(13)

将13带入14得:
(15)
由式3、6、7、8、15联立得:
(17)
那么,电阻上的瞬时电流只要不超过变频器的额定电流, 变频器就是安全的。电阻上的瞬时电流在直流电压处于上限值时达到最大值。
联立式10、13、17得最大电流值(18)式,那么能耗电阻最小值为(19)式。

(19)
那么能耗电阻的阻值范围是:

2 系统制动控制仿真研究
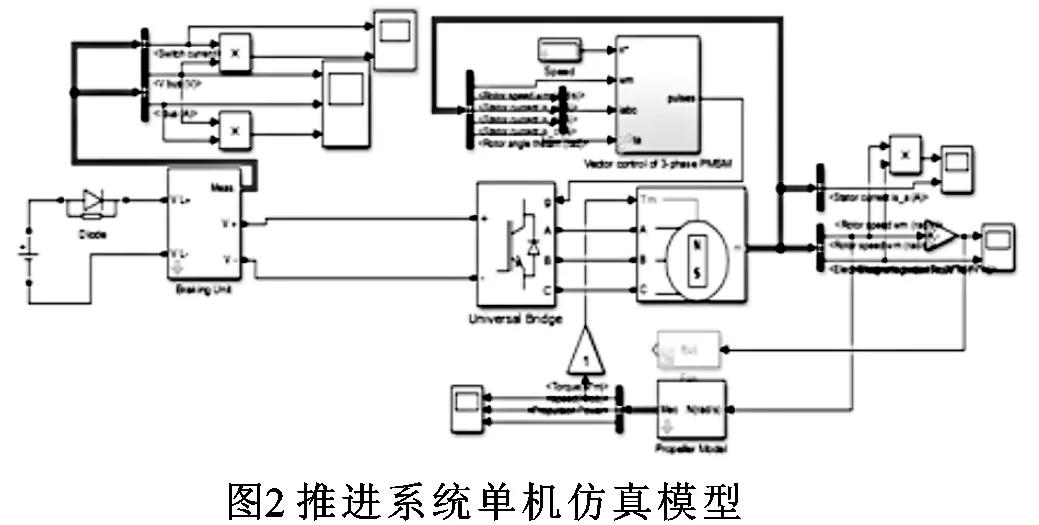
2.1 推进系统模型的建立
上图为实船模型的仿真模型,做如下简化:
1)本文是对系统制动电阻的研究,只考虑在制动电阻上消耗的功率大小,并只对制动电阻两端的电压有一个限幅的要求,所以把变频器整流单元之前的模型简化为一个直流电源。2)根据系统的对称性,且两条主推进支路制动控制是相互独立的,因此只需要对单条推进支路建立仿真模型。3)图中的制动单元与逆变器单元中的电力电子器件均为理想器件,即不考虑开关损耗和通断时间。4)该制动方式的仿真选择的是电机反转制动,即对船型设备要求最为苛刻,制动效果最快最好的一种制动方式。
仿真选取了开关全通全断式的控制方式,导通值设定1100 V,关断值设定1050 V;直流母线电压设定为1040 V,最高电压不能超过其15%;制动电阻的消耗功率不能超过300 kW,电阻大小分别选取4和8Ω,比较两者的制动效果。
2.2 制动过程仿真分析
仿真设定从0 s开始系统给出制动指令,推进电机转速逐步减少然后反向制动,船速开始降低。首先分析制动电阻为8Ω时的情况。

图3,4中可以看出,刚开始制动时电机减速,电机转矩急剧减小,大约运行到28.5 s左右时电机转矩降为0,而电机转速还没有降为0,此时电机电磁功率为负值,制动单元开始工作,消耗电机回馈的螺旋桨机械能;当推进电机转速降为0并开始反转时,此时系统处于反转制动状态,航速进一步减少,电机电机功率为正值,制动单元停止工作。
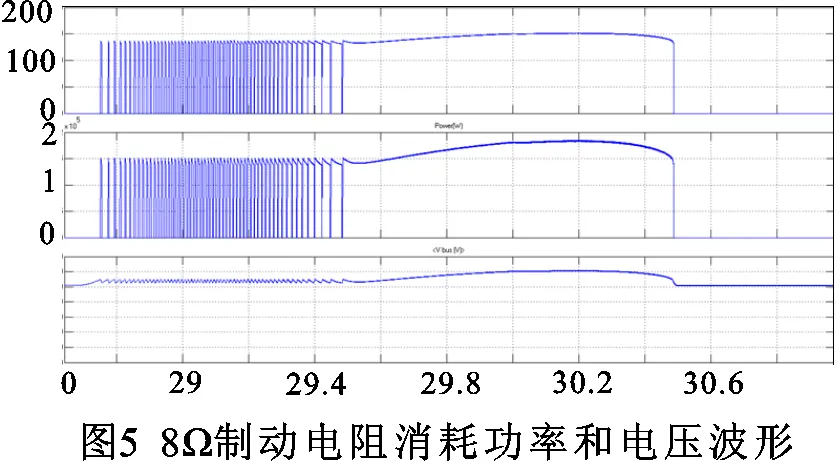
图5中可以看出,28.5 s开始系统处于能耗制动,制动电阻端电压开始升高,当达到1100 V时,开关导通,制动电阻开始消耗电能,端电压降低。由于刚开始能耗制动时,电机的负电磁功率增加缓慢,直流母线电压可以通过开关通断控制;但是当负电磁功率进一步增加时,开关导通时的消耗功率已经无法消耗回馈的电磁功率,因而导致直流母线和制动电阻功率的进一步增加,从图6中可以看出大电磁功率时导致直流母线电压没有通过制动电阻限制住,最高达到了1200 V,这样对器件和设备都有较大的影响。然后分析制动电阻为4Ω时的仿真结果。

从图7、图8中可以看出系统能耗制动的时间较8Ω制动电阻时差不多,但在随后的制动效果要优于8Ω制动电阻时的情况,推进电机的转速和电磁功率变化要大一些。
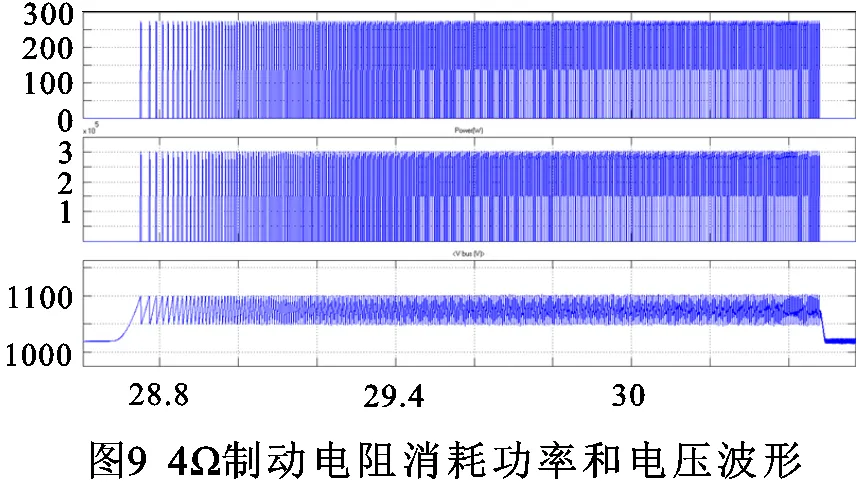
把电阻值选小了之后可以看出,电阻两端消耗的功率最高值达到300 kW,能满足电机电磁功率的负增长速度,有效的把直流母线电压限位在了1100 V以下,但从图中可以看出,电阻端消耗的功率对电阻的选择和维护成本是一个挑战。
3 结束语
本文以某船电力推进系统为主要研究对象,在参阅大量参考文献的基础上,
深入研究了大功率电力推进船舶的制动方法;重点研究了电力推进船舶制动过程中产生泵升电压的原理以及抑制方法,设计了能耗电路制动的电路,精确计算了能耗电路制动电路中能耗电阻的阻值;最后通过实船仿真验证了能耗制动的可行性和不同参数对制动效果的影响,并通过仿真结果的验证对制动电阻进行了优化设计。
制动电阻的优化设计仿真说明在极端工况的情况下大电阻、小容量的能耗制动电路可能会因为能耗功率不足而导致泵升电压的升高,选取小电阻、大容量的制动电路虽然能限制住回馈制动时的直流母线电压大小,但是对设备选型和运行及维护的成本都有很高的要求,所以日后实船需在满足设计院的技术要求的前提下尽量选取低成本的制动电路。
[1] S.Basu,K.D.Srivastava.Analysis of a fast acting circuit breaker mechanism part l:electrical aspects[J].IEEE Transactions on Power Apparatus and Systems,1972,PAS-91(3):1197-1203.
[2] S.Basu,K.D.Srivastava.Analysis of a fast acting circuit breaker mechanism part II:electrical aspects[J].IEEE Transactions on Power Apparatus and Systems,1972,PAS·91(3):1203-1211.
[3] TOSHIE TAKEUCHI, KENICHI KOYAMA, MITSURU TSUKIMA. Electromagnetic analysis coupled with motion for high-speed circuit breakers of Eddy current repulsion using the tableau approach. Electrical Engineering in Japan, 2005,152(4).
[4] 林安平,船舶电力推进系统中模糊矢量控制仿真研究. 硕士学位论文,大连大连海事大学, 2007.
[5] 鲍利群,杨云益,孙诗男. 全电力舰一未来海军舰船的发展方向.舰船工程研究, 2002.
Research on Braking Control and Braking Resistance Optimization
Xia Xingyu1, Gao Chen2
(1.Wuhan Institute of Marine Electric Propulsion,Wuhan 430064,China; 2.State Grid Hubei Maintenance Company,Yinchang 443000, Hubei, China)
Based on the research of the braking control of electric propulsion, this paper introduces a kind of energy consumption braking mode and expounds the feasibility and practicability of the energy consumption braking circuit. Besides, this paper theoretically analyzes the parameter optimization of braking resistance based on the analysis of energy consumption braking circuit. At last, through the analysis of the models with different braking resistors, this paper proves that the optimization of braking resistance can improve requirements for the parameters of brake control system in real ship .
propulsion braking control; pump up voltage; braking resistance
TM571
A
1003-4862(2017)01-0024-04
2016-07-15
夏星煜(1990-),男,工程师。研究方向:电机与电器。Email:694174166@qq.com