串级不稳定时滞过程的内模控制器设计
2017-10-13张井岗秦娜娜
张井岗,秦娜娜
串级不稳定时滞过程的内模控制器设计
张井岗,秦娜娜
(太原科技大学电子信息工程学院 太原 030024)
针对串级不稳定时滞过程研究了内模控制器的设计方法。该方法副回路采用传统内模控制,能及时快速消除内环干扰对系统整体控制性能的影响;主回路采用一种二自由度内模控制结构,将设定值跟随特性与干扰抑制特性解耦,控制器的参数整定不需要在两种特性之间折中选择,克服了传统内模控制的不足。理论分析和仿真结果表明,该方法不仅能有效减少控制器的个数,而且可使系统同时获得良好的设定值跟随特性、干扰抑制特性和鲁棒性。
二自由度控制; 串级控制; 内模控制; 不稳定时滞过程
在工业控制领域,存在一类典型的开环不稳定时滞过程,其动态特性比较复杂,通常在阶跃输入信号的作用下,系统输出很难自动达到稳态值。原因在于其传递函数模型中通常包含右半平面的极点,此外,时滞环节的存在也使得控制系统的整定难度变大。针对这类被控过程,当中间级信号可测量时,为尽快抑制混入中间级的干扰信号,通常采用串级控制结构[1-4]。常规的串级控制结构由主副两个闭环反馈控制回路组成,副回路控制能快速抑制内环扰动的影响,而且同时能改善主回路过程对象的动态特性,因而采用串级控制方式可获得比常规的单回路控制结构更好的控制性能。
近年来,针对串级不稳定时滞过程控制器的研究已取得一些研究成果。文献[5]基于Smith控制结构对控制器参数进行了整定,但控制结构比较复杂;文献[6]通过采用在反馈通道中增加控制器的方法对文献[5]中主回路控制结构进行改进。但文献[5-6]中主副回路均采用的是一自由度控制结构,控制器的设计需在设定值跟随特性与干扰抑制特性之间折中选择,难以使系统各方面的控制性能均达到最佳。为此,国内外许多研究学者针对二自由度控制进行了深入研究,该控制策略的优势在于系统的设定值跟踪特性和干扰抑制特性可单独进行调整,使系统获得满意的控制效果。文献[7]分别利用鲁棒分析法对主副回路的二自由度控制器参数进行整定,但控制器的设计过程较繁琐,而且控制系统的响应速度也较慢。文献[8-11]提出的用于控制串级不稳定时滞过程的结构中包含4个控制器,控制效果较理想,但用于改善系统性能所采用的串级控制结构较复杂且包含的控制器数量较多。为解决该问题,文献[12]基于一种改进型Smith控制结构对串级不稳定时滞过程进行外环控制,提出一种包含3个控制器的控制方案,有效减少了控制器的个数,使系统获得了良好的控制性能。但该方法控制器中包含的参数较多,不利于工程应用。因此针对串级不稳定时滞过程如何设计控制结构简单、实用性强、控制效果好的控制器成为众多学者研究的热点。近年来,内模控制因其结构简单、参数整定方便、鲁棒性强的优点在工业控制领域中受到了广泛应用[13]。目前,在许多学者的努力下,内模控制原理已被推广应用于不稳定系统[14],使内模控制方法得到了进一步发展。因此在这种背景下,为有效解决以上文献研究中存在的问题,将二自由度控制与内模控制相结合应用于控制串级不稳定时滞过程成为可能。
本文从内模控制原理出发,针对串级不稳定时滞过程,提出一种控制器的设计方法。该方法副回路采用传统的内模控制结构,用于及时快速消除内环干扰对系统整体控制性能的影响;主回路采用二自由度内模控制结构,不但可以将设定值跟随特性与干扰抑制特性实现解耦,而且控制结构简单,参数调整方便,能有效减少控制器参数的个数,降低控制器参数整定的复杂程度,使系统同时获得良好的设定值跟随特性、干扰抑制特性和鲁棒性。理论分析和仿真研究验证了本文方法的有效性。
1 串级不稳定时滞过程的内模控制结构
针对串级不稳定时滞过程,本文提出的内模控制结构如图1所示。图中,1和2,1和2分别为主副回路的设定值输入和输出,1和2分别为混入主副回路的干扰信号,1()和2()分别为主副回路过程的被控过程对象,()为主回路总的被控过程对象,2m()为副回路的被控过程对象模型,P()为主回路总的被控过程对象模型,3()为副回路内模控制器,1()与2()构成主回路二自由度内模控制器。其中,1()和2()分别用于调节主回路的设定值跟随特性和干扰抑制特性,3()用于调节副回路的干扰抑制特性和设定值跟随特性。
图1经变换可化为图2所示的等效结构形式,由图2看出此时主回路为典型的设定值滤波器型二自由度控制结构,图中1()、2()分别为主回路的设定值滤波器和反馈控制器。

图1 串级不稳定时滞过程的内摸控制结构

图2 串级不稳定时滞过程内摸控制的等效反馈控制结构
由图1、图2可分别推出副回路的设定值跟随特性与干扰抑制特性为:

(2)

(4)

基于式(5),由图1得到主回路的闭环系统输出1()为:

同样由图2得:
(8)
式中,

(10)
进一步由图1和图2得主回路的设定值滤波器1()和反馈控制器2()分别为:

(12)
2 控制器设计
本文选择串级不稳定时滞过程模型作为研究对象[8],其中主回路过程采用一阶不稳定时滞模型,副回路过程采用一阶惯性时滞模型:

(14)
式中,1,2、1,2、1,2分别为主、副回路过程的比例增益、时间常数和时滞时间。
2.1 副回路内模控制器

(16)

将式(16),式(17)代入式(15)得:

2.2 主回路控制器
将式(13)、式(14)和式(18)代入式(5),得到图1、图2虚线框中的主回路总被控过程()为:

(19)
式中,12,为控制系统的总时滞时间。
2.2.1 主回路反馈控制器C2(s)
依据内模控制原理:


(22)
确定1应使条件3)成立,即将的零点对消中的不稳定极点,则有:

由式(23)解得:
(24)

(26)


将式(28)代入式(26)得:

(30)
式中,

(32)

则式(32)可简化为:
(34)
考虑到滤波器中的高阶项对系统的影响甚微,本文采用低阶滤波器描述,为使具有式(27)中的滤波器形式,令,并将转化为,故采用麦克劳林公式展开,即:

(36)

(38)
(39)

2.2.2 主回路设定值滤波器
同样依据内模控制原理,有:

将式(20)、式(41)代入式(11),有:

(43)
将式(22)和式(43)代入式(11),得:

将式(19)、式(26)和式(44)代入式(9),得:
(45)
3 鲁棒稳定性分析
考虑到实际控制系统中常常存在模型不确定性的情况,因此应考虑鲁棒性问题。本文主要针对主回路的鲁棒稳定性进行分析,考虑不确定性的过程()包含于如下集合:

若定义:

结合式(46)和式(47),则保证系统鲁棒稳定性的条件可表示为:
(48)

式中,()为主回路过程的补灵敏度函数。
由式(48)和式(49)得:

由式(7)可推出系统的补灵敏度函数为:
(51)
将式(19)、式(25)代入式(50),得:

(53)
将式(53)代入式(52),取=j,得到本文控制系统的鲁棒稳定性约束条件为:

(54)
由式(54)可看出,对本文控制系统存在的模型不确定性,可通过调整保证控制系统的稳定性。同时由上述分析可知,当增大时()减小,相反,当减小时()增大,通常情况下()较小时意味着控制系统的鲁棒性较强,因此在选择的取值时需同时满足系统的鲁棒稳定性和干扰抑制特性。
4 仿真研究及分析
为验证本文方法的有效性,利用Matlab分别对文献[8]中的被控过程进行仿真,并将两种方法作对比,选择超调量%和ISE指标值作为验证控制系统的性能指标,指标值较小说明系统具有较好的控制性能。为确保公平性,调整参数使两种方法在标称情况下主副回路干扰抑制特性的ISE指标值相同,进而分别比较主回路过程的标称系统的设定值跟随特性和摄动系统的动静态特性。
例1 考察文献[8]中串级不稳定时滞过程,有:

可见在标称情况下,利用本文简单的串级控制结构使系统表现出与文献[8]基本一致的动态响应特性。为验证控制系统的鲁棒性,假设参数1、2分别增大5%,1、2分别增大30%,得摄动系统的主回路设定值跟随特性、干扰抑制特性和性能指标分别如图4a、图4b和表1所示,可看出本文方法鲁棒性优于文献[8]中的方法。
a. 设定值跟随特性
b. 干扰抑制特性
图3 例1标称系统的主回路设定值跟随特性和干扰抑制特性

表1 例1控制系统性能指标

a. 设定值跟随特性
b. 干扰抑制特性
图4 例1摄动系统的主回路设定值跟随特性和干扰抑制特性
例2 考察文献[8]中串级不稳定时滞过程,有:

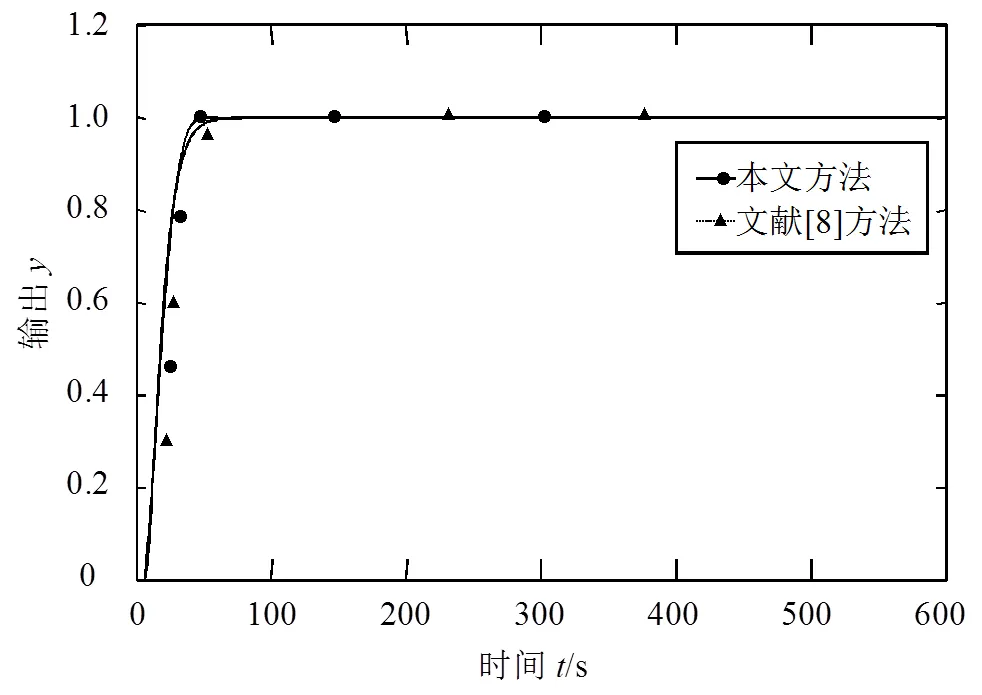
利用本文方法,选取参数为1=1.2,2=0.973,3=0.6;文献[8]参数为:λ=1.2,λ1=0.6,λ2=1。设系统的设定值输入为1()=1();扰动输入为1()=-1(-60),2()=-1(-30)。获得标称系统的主回路设定值跟随特性和干扰抑制特性分别如图5a和图5b所示,表2为性能指标。由此可看出标称情况下,与文献[8]相比,使用本文简单控制结构可使系统能很快达到设定值,调节时间较短。为验证系统鲁棒性,假设参数1、2增大5%,1、2增大30%,得摄动系统的主回路设定值跟随特性、干扰抑制特性和性能指标分别如图6a、图6b和表2所示,可见本文方法使系统具有更好鲁棒性。

a.设定值跟随特性
b. 干扰抑制特性
图5 例2标称系统的主回路设定值跟随特性 和干扰抑制特性

表2 例2控制系统性能指标

a.设定值跟随特性
b. 干扰抑制特性
图6 例2摄动系统的主回路设定值跟随特性 和干扰抑制特性
5 结束语
针对典型的串级不稳定时滞过程,本文提出一种内模控制结构,并给出了控制器的设计方法。该方法副回路采用传统内模控制结构,有效减少了内环扰动对系统整体控制性能的影响,主回路通过采用二自由度内模控制结构实现了设定值跟随特性与干扰抑制特性的解耦,控制器参数不需要在两种特性之间折中选择。理论分析和仿真研究表明,本文方法仅包含3个控制器和3个独立的可调参数,参数调整方便,采用的简单串级控制结构依然使系统同时获得良好的设定值跟随特性、干扰抑制特性和鲁棒性。
[1] ZHANG W, GU D, WANG W, et al. Quantitative performance design of a modified smith predictor for unstable processes with time delay[J]. Industrial & Engineering Chemistry Research, 2004, 43(1): 56-62.
[2] SARAF V, ZHAO F, BEQUETTE B W. Relay autotuning of cascade-controlled open-loop unstable reactors[J]. Industrial & Engineering Chemistry Research, 2003, 42(20): 4488-4494.
[3] LEE Y, SUNGGOOK O H, PARK S. Enhanced control with a general cascade control structure[J]. Industrial & Engineering Chemistry Research, 2002, 41(11): 2679-2688.
[4] KAYA I, ATHERTON D P. Improved cascade control structure for controlling unstable and integrating processes [C]//Decision and Control, 2005 European Control Conference. [S.l.]: IEEE, 2005: 7133-7138.
[5] KAYA I. Improving performance using cascade control and a Smith predictor[J]. Isa Transactions, 2001, 40(3): 223-234.
[6] KAYA I, TAN N, ATHERTON D P. Improved cascade control structure for enhanced performance[J]. Journal of Process Control, 2007, 17(1): 3-16.
[7] ALFARO V M, VILANOVA R, ARRIETA O. Robust tuning of two-degree-of-freedom (2-DoF) PI/PID based cascade control systems[J]. Journal of Process Control, 2009, 19(10): 1658-1670.
[8] LIU Tao, ZHANG Wei-dong, GU Dan-ying. IMC-based control strategy for open-loop unstable cascade processes[J]. Industrial & Engineering Chemistry Research, 2005, 44(4): 900-909.
[9] LIU Tao, ZHANG Wei-dong, GU Dan-ying. Analytical design for a class of open-loop unstable cascade (control) systems[J]. Journal of Control and Decision, 2004, 19(8): 872-876.
[10] KAYA I, ATHERTON D P. Use of smith predictor in the outer loop for cascaded control of unstable and integrating processes[J]. Industrial & Engineering Chemistry Research, 2008, 47(6): 1981-1987.
[11] UMA S, CHIDAMBARAM M, RAO A S. Enhanced control of unstable cascade processes with time delays using a modified smith predictor[J]. Industrial & Engineering Chemistry Research, 2009, 48(6): 3098-3111.
[12] PADHAN D G, MAJHI S. Modified smith predictor based cascade control of unstable time delay processes[J]. ISA Transactions, 2012, 51(1): 95-104.
[13] GARCIA C E, MORARI M. Internal model control. A unifying review and some new results[J]. Industrial & Engineering Chemistry Process Design and Development, 1982, 21(2): 308-323.
[14] SHAMSUZZOHA M, LEE M. Analytical design of enhanced PID filter controller for integrating and first order unstable processes with time delay[J]. Chemical Engineering Science, 2008, 63(10): 2717-2731.
[15] MANFRED M, ZAFIRIOU E . Robust process control[M]. Englewood Cliffs, N J, USA: Prentice Hall, 1989.
编 辑 漆 蓉
Design Method of IMC Controllers for Unstable Cascade Processes with Time Delay
ZHANG Jing-gang and QIN Na-na
( Institute of Electronic Information Engineering, Taiyuan University of Science and Technology Taiyuan 030024)
A design methodof internal model control (IMC) controllers for unstable cascade processes with time delay is presented. The cascade proposed structure contains two control loops, a secondary loop and a primary loop. In the secondary loop, an analytical design method is derived based on the traditional IMC, it can quickly reject the disturbance in the inner loop. In order to decouple the set-point tracking characteristic from disturbance rejection characteristic, a 2 degree of freedom (DOF) IMC structure is used in the primary loop. Then the set point tracking controller and the disturbance rejection controller can be tuned independently,which overcomes the shortage of a traditional IMC. Both theoretical analysis and simulation results demonstrate that the proposed method can reduce the number of controller effectively,meanwhile provide good performance of set-point tracking and disturbance rejection as well as robustness simultaneously.
2 degree of freedom (DOF) control; cascade control; internal model control; unstable process with time delay
TP273
A
10.3969/j.issn.1001-0548.2017.01.007
2015-11-04;
2016-02-18
山西省自然科学基金(2011011011-2);山西省回国留学人员科研项目(2013-092)
张井岗(1965-),男,博士,教授,主要从事先进控制理论及应用方面的研究.
