基于BP神经网络的停车诱导泊位预测①
2017-10-13高广银
高广银, 丁 勇, 姜 枫, 李 丛
基于BP神经网络的停车诱导泊位预测①
高广银, 丁 勇, 姜 枫, 李 丛
(南京理工大学泰州科技学院计算机科学与技术系, 泰州 225300)
研究了从历史停车数据中挖掘知识并预测短时段内停车泊位数问题. 分析了停车诱导系统中影响停车泊位数的因素, 结合时间序列确定网络的输入变量, 建立BP神经网络, 在不同训练阶段采用自适应调整学习速率, 以及增加动量项改善网络的收敛性, 运用Matlab对采集的市区大型地下停车场真实数据进行仿真实验与分析, 取得良好预测效果. 结果表明该方法与传统时间序列预测方法相比, 在预测的精度方面有较大程度提高.
BP神经网络; 停车诱导; 泊位; Matlab
随着我国经济的发展, 人民生活水平普遍提高, 城市居民机动车保有数量急剧增长, 停车问题已逐渐成为城市交通的难题, 特别在城市中心区域尤为突出. 为了缓解机动车停车泊位供需矛盾, 智慧交通系统引入了停车诱导[1], 它以提高停车场以及相邻道路的利用率为目的, 多途径地向驾驶员提供停车场位置、车位数量、车位使用状况及道路交通状况等信息, 从而引导驾驶员快速、有效地找到停车场. 停车诱导的核心是通过事先部署的分级诱导屏实时地显示数据中心发送的停车场空余泊位数, 但由于停车信息是时刻动态变化的, 当驾驶员看到诱导信息时的空余泊位数与车辆到达相应停车场后的实际空余泊位数, 往往有较大出入, 造成不必要的麻烦, 可见除了实时地显示当前停车泊位信息, 对未来短时间内停车泊位的准确预测是停车诱导的重要基础. 因此, 本文针对停车诱导泊位预测进行研究.
1 相关工作
在停车诱导方面国外走在了前列, 停车泊位的预测已经成为智能交通系统的重要组成部分, 支撑停车诱导系统, 欧洲、美国及日本等国家已经进行了大量的研究工作, 并在实际中取得了应用. 最先采用的是线性时间序列预测方法[2,3], 该方法假定系统中各变量之间是线性关系, 能快速预测下一时刻泊位数, 然而线性模型存在一定的局限性, 它忽略了实际应用中的非线性因素, 从而很难准确地分析和预测; 进一步发展的是非线性时间序列预测模型[4,5], 针对寻找停车位时花费的时间较多、停车效率降低的问题, 对中心区寻找车位行为进行建模分析与理论分析, 并提出了阈值自回归模型[6]等方法. 然而该方法由于理论的复杂性及模型分析需要过多的人工干预, 非常依赖于分析人员的经验, 故在实际应用中存在一定的局限性. 国内学者针对停车泊位预测研究也取得了一定的成果, 如将车位占有率的变化转换为时间序列问题的车位占有率预测模型; 陈群[7]、何洪波[8]基于动力学系统原理, 通过嵌入维数和延迟时间对停车泊位的历史数据实施相空间重构, 建立神经网络模型进行停车泊位预测, 取得了良好的预测效果. 神经网络模型可以较好地描述复杂非线性问题, 并且能够从数据样本中自动学习以前的经验而无需反复查询和表现过程, 并逼近那些描述样本数据规律的最佳函数, 且所考虑的系统表现函数越复杂, 神经网络的作用就越明显. 因此, 神经网络已经成为目前非线性预测中的常用方法[9,10].
2 用于停车泊位预测的BP神经网络
基于神经网络进行停车泊位数预测, 关键之一是要确定网络的输入变量, 即要对停车泊位数的各项影响因素进行分析和表示; 其次是设计网络, 包括确定网络层数、选择传递函数、设置学习速率; 最后根据样本数据对网络进行训练, 并用于预测, 对结果进行误差分析, 得出结论.
2.1 停车泊位数影响因素分析
将停车泊位预测问题转化为时间序列预测问题之所以实际预测效果还不够理想, 是因为仅注意到时间这一个维度对停车泊位数的影响, 而忽略了影响区域停车泊位数的其他因素, 如城市经济发展水平、停车场所在位置及周边交通状况、天气情况和是否节假日等. 本文对停车场所在位置、天气以及是否节假日等影响因素进行分析, 并对这些因素进行表示, 其中停车场在非商业中心区, 用“1”表示, 在商业中心区, 用“0.75”表示, 并考虑实时交通状况, 交通条件较差时, 用“0.5”表示; 天气良好时, 用“0”表示, 天气较差时用“0.5”表示, 天气恶劣时用“0.25”表示; 节假日时, 用“1”表示, 非节假日时, 用“0.5”表示. 将其视为神经网络的一类输入变量, 作为对停车场停车数量的影响因素加以分析.
2.2 设计BP神经网络
① 网络层数的确定
BP神经网络可以包含很多个隐含层, 但包含单个隐含层的BP神经网络, 通过增加隐含层的神经元个数, 同样可以实现对任意非线性的映射, 故本文采用单隐层的BP神经网络, 即包含三层: 输入层、单隐层和输出层. 停车泊位预测属于时间序列问题, 通常采用t-50、t-40、t-30、t-20、t-10、t时刻来预测t+10时刻的泊位数, 考虑到上文分析的影响因素, 故输入层的神经元有9个, 分别对应6个时刻的泊位数及3个影响因素. 根据Kolmogorov定理可知, 隐藏层的神经元可以取19个. 由于预测t+10时刻的泊位数, 故输出层的神经元设为1个.
② 传递函数的选择
本文隐藏层选择传递函数为Log-Sigmoid函数:

输出层选择传递函数为Purelin函数:
() =(2)
③ 自适应学习速率调整
在时间序列预测模型基础上增加3个影响因素给神经网络带来了复杂性, 为了有效地减少训练时间, 本文采用自适应的学习速率, 使网络的训练在不同的阶段自动设置不同学习速率的大小.

④ 权值更新的改进
在权值调整量Δw()中加入动量项以解决学习速率的选择与确定. 即将前一次权值调整量Δw(-1)的一部分迭加到按本次误差计算所得的权值调整量ηδx上, 作为本次的实际权值调整量Δw().

项为动量项, 其取值为(0,1)之间的常数, 根据经验可取0.1. 加入动量项后, 可以降低神经网络对误差曲面局部细节的敏感性, 有效地抑制神经网络陷入局部极小值, 减小训练过程的震荡趋势, 从而改善网络的收敛性.
2.3 训练BP神经网络
① 实验数据
本文实验数据取自泰州市某商业中心地下停车场管理系统实际接口数据, 时间段为十月份, 每隔5分钟取一条实时数据, 共有8928条停车泊位记录. 取t时刻、t-10分钟时刻、t-20分钟时刻、t-30分钟时刻、t-40分钟时刻、t-50分钟时刻泊位数并作归一化处理以及3个影响因素的值, 作为网络的输入变量, 以2015-10-12~10-18每天16:30~17:30为例, 如表1所示. 根据以上组成样本的方法, 去掉夜间部分数据, 一共组成1872个样本. 选择其中1300个样本作为BP神经网络的训练样本, 572个样本作为测试样本. 对原始数据归一化处理及对预测数据还原处理的公式为:

(6)
式中:为原始数据,为归一化后数据,max为原始数据最大值,min为原始数据最小值.
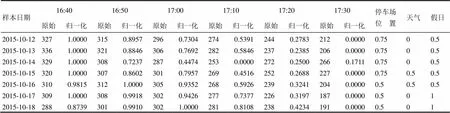
表1 停车泊位数原始数据/归一化以及停车场位置、天气、假日
② 创建BP神经网络并训练
实验环境基于Matlab, 利用以下代码创建和训练BP神经网络:
input = importdata(‘train_in.txt’);
output = importdata(‘train_out.txt’);
Threshold = [0 1; 0 1; 0 1; 0 1; 0 1; 0 1; 0 1; 0 1; 0 1;];
net = newff(threshold, [19 1], {‘logsig’ ‘purelin’}, ‘traingdx’);
net.trainparam.show = 50
net.trainparam.epochs = 500
net.trainparam.goal = 0.01
net.trainparam.lr = 0. 1
net = train(net, input, output)
BP神经网络在训练100次数左右达到收敛, 训练曲线如图1所示.
3 实验结果
3.1 停车泊位数实际值与预测值的比较
训练好的网络通过测试样本进行仿真, 检验网络的泛化能力. 预测结果及误差如图2、图3所示, 所展示的是15:30~19: 30时间段每隔10分钟预测一次的结果.
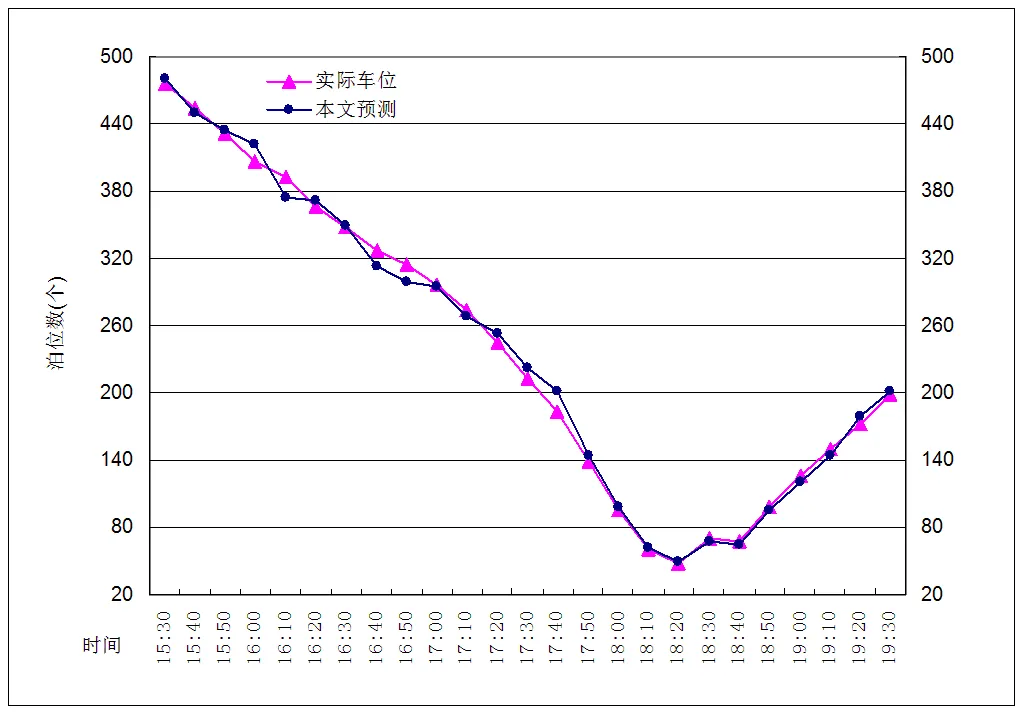
图2 预测值与实际泊位数比较图
3.2 本方法与传统时间序列预测方法比较
传统时间序列预测法不考虑影响停车泊位变化的各种因素, 利用实际泊位数历史数据构造模型, 进而推测未来泊位数变化趋势, 通常认为平均误差在5%左右为预测效果良好. 本文在综合考虑了影响停车泊位的其他因素后, 确定将停车场位置、天气及节假日等并入网络作为输入变量, 增强了网络的泛化能力, 如表2所示, 在保证良好预测结果的同时, 提高了预测的精度, 预测平均绝对误差为6.76个, 93.1%的预测结果其相对误差小于5%.

图3 预测值与实际泊位数误差图

表2 与传统时间序列预测法比较(%)
注: MAE:平均绝对误差; MRE:平均相对误差; MaRE:最大相对误差; Pro10:相对误差小于等于10%所达比例; Pro5:相对误差小于等于5% 所达比.
3.3 误差分析
本文方法相比较传统方法预测的平均相对误差无明显改进, 是因为在小部分时刻的预测偏差较大, 产生该偏差的原因是天气作为网络的输入变量, 其值不够精确, 甚至在某些时刻由于天气突变, 导致输入变量值误差较大, 例如在实验当天16:40左右下起大雨, 造成预测值明显低于了实际值. 另一个导致预测偏差的因素是实际交通状况, 特别是在上下班高峰期, 停车场附近车流量积压较大, 出场车辆未能及时离开停车场, 往往会造成预测值偏高于实际值.
4 结论
本文基于BP神经网络对停车诱导泊位预测进行了研究, 分析了影响停车泊位数的主要因素, 建立了用于停车泊位预测的BP神经网络. 通过采集的停车场真实数据对网络进行训练与预测, 仿真实验结果表明本文方法在保持良好预测结果的同时, 比传统时间序列预测法在预测精度上有较大提高, 但由于天气等输入变量的值不够精确, 导致网络在某些时刻预测偏差较大. 进一步的研究将完善网络的输入变量, 对天气、交通等不确定因素建立隐马尔科夫模型进行预处理, 从而提高网络的泛化能力.
1 Wang B, Liu Y, Hei X, Wang L, Zhang Z. A parking guidance method based on parallel particle swarm optimization algorithm. Computational Intelligence and Security. IEEE. 2014. 568– 572.
2 Frank RJ, Davey N, Hunt SP. Time series prediction and neural networks. Journal of Intelligent and Robotic Systems, 2001, 31(1): 91–103.
3 Athineos M, Ellis DPW. Autoregressive modeling of temporal prediction. IEEE Trans. on Signal Processing, 2007, 55(11): 5237–5245.
4 Jia W, Zhao D, Shen T, Ding S, Zhao Y. An optimized classification algorithm by BP neural network based on PLS and HCA. Applied Intelligence, 2015, 43(1): 176– 191.
5 Selamat A, Abae G, Mashinchi R. Software fault prediction using BP-based crisp artificial neural networks. International Journal of Intelligent Information and Database Systems, 2015, 9(1): 1–15.
6 Juan Y, Li H. An improvement and application of genetic BP neural network. Computational Intelligence and Security. IEEE. 2015. 10–13.
7 陈群,宴克非,王仁涛,等.基于相空间重构及Elman网络的停车泊位数据预测.同济大学学报(自然科学版),2007, 35(5):607–611.
8 何洪波,韩印,姚佼.基于混沌和BP神经网络的有效停车泊位预测.交通与运输,2012,14(7):25–27.
9 张丽莉,储江伟,范东溟.基于神经网络的有效停车泊位预测方法研究.黑龙江工程学院学报,2015,29(3):37–44.
10 李松,罗勇,张铭锐.遗传算法优化BP神经网络的混沌时间序列预测.计算机工程与应用,2011,47(29):52–58.
Prediction of Parking Guidance Space Based on BP Neural Networks
GAO Guang-Yin, DING Yong, JIANG Feng, LI Cong
(Department of Computer Science and Technology, Taizhou Institute of Sci.&Tech., Nanjing University of Science and Technology, Taizhou 225300, China)
The problem of excavating knowledge from historical parking data and forecasting the number of parking spaces in a short period is studied. By analyzing the factors that affect parking space, we establish a BP neural network in which the network input variables are defined through the combination of time series. Then, a self-adaptive studying rate is used in different stage of training and the momentum terms are added to improve the convergence of the network. According to the real data collected from a large underground parking in town, the simulation and analysis are executed based on Matlab, which results in well-accepted prediction effect. The conclusion shows that the proposed method can improve the prediction accuracy compared with the traditional time series prediction method.
BP neural network; parking guidance; parking space; Matlab
国家自然科学基金(61373012);泰州市社会发展项目(TSD201538,TS031)
2016-04-18;收到修改稿时间:2016-05-19
[10.15888/j.cnki.csa.005521]