实时修正偏移量的循迹机器人控制系统研究与实现
2017-10-10周靖皓
周靖皓

摘要当前,人们要求循迹机器人智能性强、可操控性强、可拓展性强、具备实时修正偏移功能,本次依人们的需求设计了一套实时修正偏移量的循迹机器人控制系统。通过实验可知,该次的实时修正偏移量的循迹机器人可准确依轨迹路线前进,具有较高的实用性。
关键词实时修正偏移量;循迹机器人;控制系统
循迹机器人,就是能自动读取行迹路线,智能完成行进过程的机器人。循迹机器人可应用在工业生产上、道路运输上、商业服务上。当前,人们要求循迹机器人智能性强、可操控性强、可拓展性强、具实时修正偏移功能,本次依人们的需求设计了一套实时修正偏移量的循迹机器人控制系统。
1实时修正偏移量的循迹机器人控制系统设计原理
循迹机器人的设计原理为将机器人设计为四轮小车,应用直流减速电机驱动设备为循迹机器人提供动力,车的前轮可就向、左、右3个方向驱动,后车轮可自由转动。力体的左前、右前、右后、右后4个方设装置传感器,接收驱动信息。传感器将接收的信息传输给主控芯片,主控芯片处理数据信息,给予控制判断,控制车体驱动器。车体驱动器向车体传达驱动信息,控制车体的行动。
2实时修正偏移量的循迹机器人控制系统实现方法
2.1硬件系统设计
将硬件整体设计分为4个模块:第一个模块,车体控制模块设计、它由PLC控制,PLC中设置循迹机器人的所有程序模块,它负责循迹机器人的数据处理工作,实现循迹机器人的智能化功能;第二个模块,车体电路驱动功能,它为循迹机器人提供电力支持;第三个模块,信号输入输出功能,虽然车体电路驱动功能自带有信号输入输出的功能,然而它的信号输入、输出功能不强,需要强化信号输入输出辅助功能;第四个模块,传感器的功能,它负责读出循迹路线,将反射线转化为电平数据。
2.2软件系统设计
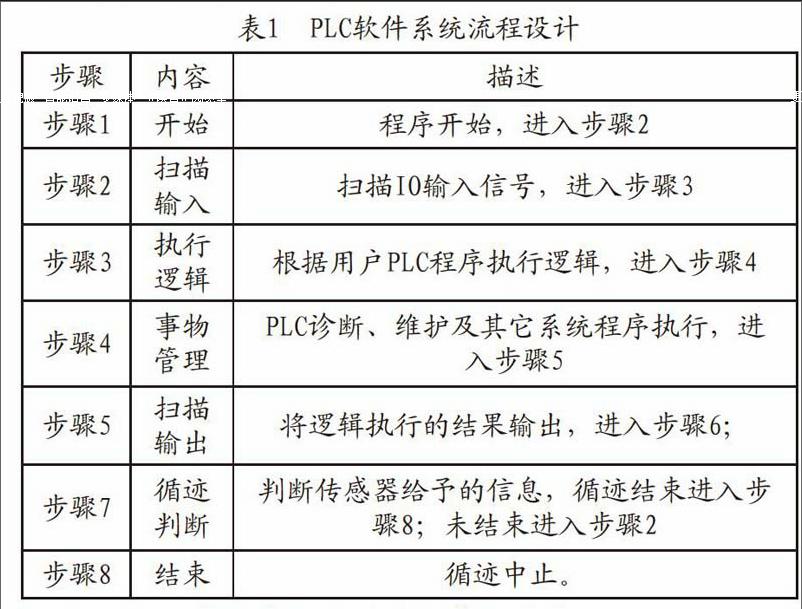
2.2.1PLC软件系统流程设计(如表1所示)
表1为PLC软件系统流程设计:循迹机器人依次流程设计完成循迹控制。
2.2.2 PLC循迹的方式设计
PLC循迹的方式为应用循环扫描的方式接收传感器传来的信息。PLC具有定时、循环、中断扫描多种方式。循环扫描方式为用户设定循环图,PLC依图循环执行;定时扫描为用户设定循环时间,传感器一次接受一段时间传感器传来的描描图;中断扫描包括扫描图循计中断、高数计速中断、定时中断3种方式,PLC依中断命令中止循迹作业。PID算法又称Proportional,Integral and Derivative算法,它是PLC闭环控制的一种算法。访次PLC循环应用PID算法。
2.2.3 PID实时修正偏移量的算法设计
PID实时修正偏移量的算法为步骤3的执行逻辑,它是实时修正偏移量的循迹机器人控制系统最核心的部分。
1)基本算法设计。算法在OuastuslI软件平台基础上完成,应用Verilog HDL语言编程。循迹机器人行进时发射击红外光线,当红外光线扫描黑色时,红外线无法接受到反射线,此时白找麻烦模块输出高电平;反之,则能接受反射线,输出低电平。应用此原理,循迹机器人可以一边行进,一边阅读反射光线,控制电平。PLC搜集电平数据信息,实时修正偏移量,令机器人依预设的黑色轨迹行进。
PID可控制参数为成比例的反应控制偏差信号e(t);成积分时间常熟参数T,T的大小决定积分强弱;反应偏差信号,反应偏差信号为预先修正的预数,这一预数由数种规则决定性。
2)专家PID算法规则。PID算法规则,就是一边计算上一次招描的资源与这一次扫描的姿势,结合数据计算得到反应偏差信号,这就是实时修正偏移量的原理。比如现在机器人运行姿态由直线00000100000转到了右微偏00010000000,经计算获得偏差量,即微调PID控制参数。
3)专家PID算法修正系数。专家PID算法修正系数不止一种规则。现建立距离偏差Ad修正系数的规则,这一规则根据距离的偏差进行修正。设修正系数的范围为1cm~5cm,结合PID参数影响规律建立偏差Ad对PID控制参数的修正系数表K如表2。
表2偏差Ad对P19D控制参数的修正系数表Ktz
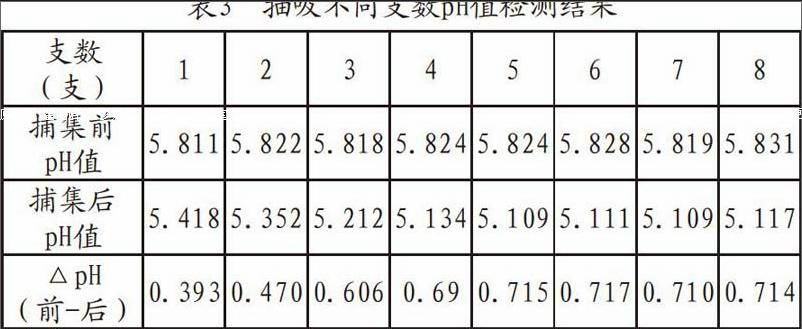
结合距离变化率A对PID控制参数的修正系数K,现将参样周期设定为一个距离的变化率,修正系数如表3。
4)专家修正参数计算公式。专家参数PID的計算公式为:
结合专家参数PID的计算公式代入(1)即为实时修正偏移量的循迹机器人控制系统算法。
3实时修正偏移量的循迹机器人控制系统实现效果
为了说明该次实时修正偏移量的循迹机器人控制系统实现的效果,现做了8次循迹机器人控制系统行进实验,实验数据如表4。
在表4中,E1为实际理想轨迹与实际循迹轨迹最大的偏差。E2为循迹机器人最终到达目标点与理论目标点的最大偏差。
从表4可以看到该次设计的循迹机器人具有一边行进、一边阅读数据,进行智能纠偏的功能。除了机器人在大幅拐弯时,会出现拐性较大,轨迹略为偏移,然而它会依阅读的轨迹继续调整行进路线。该次设计的循迹机器人进行路线可依黑线设定的进行路线前进,预设路线与设计路线重合率极高。
4结论
本次设计的实时修正偏移量的循迹机器人由PLC系统控制循迹机器人的行进轨迹,应用PID实时修正偏移量的算法控制PID的偏移量,应用PID专家算法修正控制参数。通过实验可知该次的实时修正偏移量的循迹机器人可准确依轨迹路线前进,具有较高的实用性。endprint
