基于高速视频序列的断路器运动特性检测
2017-10-10李霁寅郭晶晶
李霁寅 郭晶晶

摘要 断路器作为最常见的一次电气设备,在电网、变电站中必不可少。断路器在电网架构里肩负着控制和保护双重任务,由于断路器常规运动特性检测手段具有效率低、精度差、耗人工等缺点,检测可靠性及质量较差。所以,本文把计算机视觉引入到对断路器运动特性分析中,采用基于预定模板的断路器运动特性分析法对高速视频序列的断路器运动特性分析,并利用滑动窗口滤波法对其运动特性参数滤波去噪,使得结果更接近于断路器实际运动特性。此算法解决了许多目前对断路器运动特性测试的缺点。
关键词 计算机视觉;预定模板;滑动窗口滤波
中图分类号 TP2 文献标识码 A 文章编号 2095-6363(2016)14-0057-02
随着电网建设对输变电设备要求的不断提高,对断路器检测也提出了更高的要求。目前各类断路器机械特性的测试,主要依靠单片机来处理数据,同时测试仪控制的核心也是通过使用单片机处理,不同的传感器采集相关信号并转换为电平,进而通过处理器的运算逻辑判断进行特性测试。然而在测量行程等关键性的机械参数中,多次实验的结果都显示,仅仅依靠提高部分传感器的精度是无法满足现实的需要,依然有很多共性的问题需要解决。比如:尺寸不同的断路器、型号不同的设备、传感器的批次不同精细度不同,测试设备的便携性不高和安装使用过程中复杂繁琐的配置过程造成相关工作效率的降低;真空断路器的外形结构和相关尺寸通过现有技术已无法进一步缩小,而动触头的生产环境决定其周围可供安装位移传感器的剩余空间很小,通常使用的直线位移传感器、角位移传感器受限于自身体积,在操动机构和主轴上安装越来越困难和成本高昂;另一方面,传感器的个体差异和测试仪器的批次差异,也是造成测量结果出现较大偏差的重要原因。人们通常将精力集中在更高精度的光栅传感器、更高精度的角位移传感器的改进上,但这无法从根本上解决问题,这些改进从类别上看都属于接触式传感器的微调。不可否认,“接触式”传感器的测量无法避免安装配置过程中导致的匹配差异性,同时安装效果也直接影响着测试的准确度,最终也会影响到电网的安全可靠运行。
本文将计算机视觉技术引入到行程测试中,计算机视觉在目标检测技术上的应用很多,通过一幅或多幅图像认知周围环境信息,包括能够感知环境中物体的几何信息。目前,其在电力系统故障识别中应用比较广泛,但是在断路器特性检测中的应用还是比较少,文献初步实现了通过机器的视觉角度来对断路器的机械特性参数测量和定性;但由于相机性能限制,只获取不足十帧的机构运动图片,只能对断路器行程进行局部分析。文献在追踪过程中采用的匹配模板和背景颜色差别不大、匹配困难、误差高,传统的系统匹配手段和方法在匹配效率上存在很大的不足,极低的速率限定其仅能定性计算,实用性不高。计算机视觉应用技术的两个主要特点是高效率和针对性强。采用基于预定模板匹配的技术实现断路器运动特征检测,实现非接触式测量,其具有设备组成简捷、在线实时、非接触、高精度等特点。从根本上解决断路器行程测试中的诸多问题,提高测试效率。
1匹配模板算法
匹配模板是指利用一个图像模板与源图像进行比较,通过比对在源图像中是否存在与模板图像相同或相似的区域,如果存在相似區域,提取该区域并记录相应坐标,模板图像一般是从源图像中获取。常用的模板匹配法有基于灰度信息的模板匹配和基于特征点的模板匹配,由于断路器的目标区域形状特征不是很明显,为了保证匹配的准确性和精度本文采用基于灰度信息的匹配算法。
像素的灰度值几乎包含了一幅图像的所有信息,因此基于图像灰度特征的匹配方法是最基本的匹配方法也是最稳定准确的匹配方法。采用某种搜索方法找出待匹配图片中的目标区域的灰度特征,然后和参考模板的灰度信息进行相似性度量。基于图像的灰度特征的匹配算法不需要对特想的特征进行提取,只需根据图像的全部灰度信息进行匹配,因此能提高图像匹配的精度届鲁棒性。但是由于基于灰度信息的匹配算法,例如互相关匹配算法中把匹配点周围区域的点的灰度都考虑进来进行计算,这样计算量大速度慢。本文采用归一化相关系数匹配法。
归一化相关系数匹配法:
其中归一化系数:
2断路器运动特性分析
2.1基于预定模板的断路器匹配
通过将待匹配图像序列的坐标进行获取,将获取坐标区域内的图像进行模板匹配,基于图像灰度信息的模板匹配在待匹配图像感兴趣区域中搜索与模板图像相似度最大的区域并获得最大值点的坐标(x0,y0),然后以坐标(x0,y0)为起点坐标(x0+W,y0+H)为终点在待匹配图像中画一红色矩形框,其中W和H分别为模板图像的宽和高,矩形框大小与模板图像大小一样,最后在取矩形框中心点作为目标跟踪的定位点坐标(x,y),其获取公式为:
2.2运动特性参数的求解
模板图像与连续的断路器图像进行匹配并获取匹配的中心坐标(xn,yn)其中n=0,1,2,3……,根据获得的断路器坐标参数计算断路器的瞬时速度Vn和位移Sn。
获得运动速度和位移后对坐标参数进行滤波,然后计算新的速度和位移。滤波公式:
3试验及结果
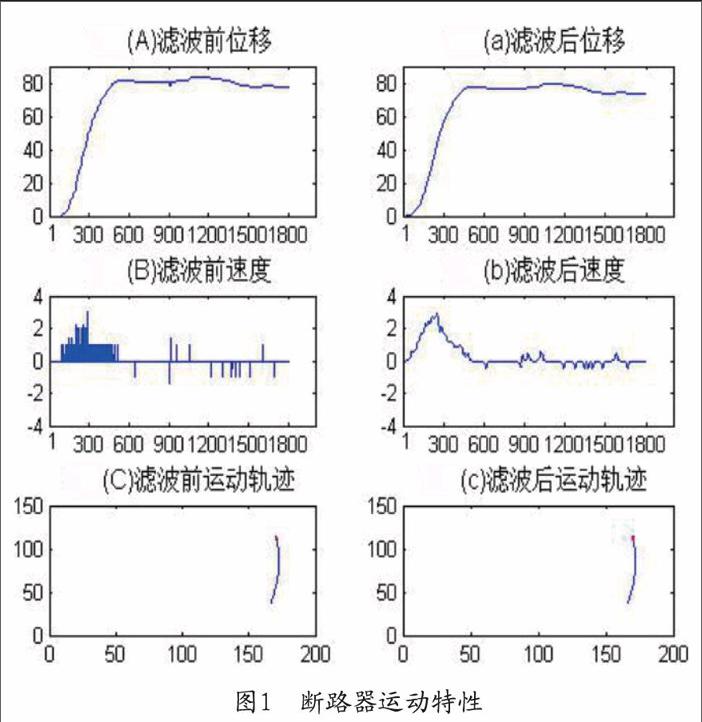
对断路器所有图像序列匹配并对目标定位跟踪后获得其参数,通过计算得到的断路器的运动特性如图1所示断路器运动特性图1(A)为滤波前断路器位移曲线,图1(a)为滤波后断路器位移曲线,图1(B)为滤波前速度曲线,图1(b)为滤波后速度曲线,图1(c)为断路器滤波前实际运动轨迹,图1(c)为断路器滤波后实际运动轨迹:
由断路器的运动特性曲线图的分析可知,根据断路器的位移曲线分析,断路器在运动到终点时趋于平稳,但是过一段时间有一个起伏很小的弹跳阶段。图1左边是未滤波的运动特性右边是滤波后的,左边运动特性呈现的并不是平滑的运动曲线,其中速度曲线图最明显,这是由于断路器的高速运动使得相邻的两帧图片的运动位移太微妙,所以进行模板匹配时出现xn=xn-1,yn=yn-1,所以会出现速度Vn=0的现象。本文通过滑动窗口滤波的方法对断路器的坐标参数进行滤波,从滤波后的运动特性图可知滤波后的运动特性曲线更趋近平滑曲线更接近于断路器实际运动特性。
4结论
本文介绍了基于预定模板的断路器运动特性分析,利用基于灰度信息的模板匹配法对断路器连续图片进行匹配,然后定位跟踪运动目标并获取其位置坐标,通过对位置坐标的计算绘制出断路器运动特性曲线图,最后利用滑动窗口滤波法对位置坐标参数进行滤波,获得更接近于断路器实际运动特性曲线图。基于预定模板对断路器的运动特性进行分析实现了设备组成简捷、在线实时、精度得到提高、无需直接接触等特点。从根本上解决断路器的相关参数获取和设备测试中的诸多问题,提高测试精度和准确率。endprint
