一种改进的无刷直流电机直接转矩控制策略
2017-10-10周运杰潘峰卢沁雄闫庚龙韩如成
周运杰,潘峰,卢沁雄,闫庚龙,韩如成
(太原科技大学电子信息工程学院,山西 太原 030024)
一种改进的无刷直流电机直接转矩控制策略
周运杰,潘峰,卢沁雄,闫庚龙,韩如成
(太原科技大学电子信息工程学院,山西 太原 030024)
通过分析换相和非换相时间段内电机被施加不同零矢量时电磁转矩的变化速率发现:若电机在换相时和换相前被施加的零矢量不同,则电机在换相时间段内被施加零矢量时电磁转矩会迅速减小,在控制周期一定的情况下,电磁转矩减小过快会引起明显的转矩脉动。为此,提出一种在每个扇区使用2个零矢量的方案,使得电机每次换相时和换相前被施加的零矢量相同,从而抑制由于零矢量引起的电磁转矩周期性脉动。仿真结果和实验结果证实了所提出方法的有效性。
无刷直流电机;直接转矩控制;转矩脉动;零电压矢量
Abstract:The changing rate of the electromagnetic torque when the motor is imposed on different null voltage vectors during commutation intervals and non-commutation intervals were analyzed.It was found that the electromagnetic torque will be decreased quickly during commutation intervals when the motor is imposed on zero voltage vectors,if the null voltage vectors imposed on the motor are different during and before commutation intervals.So great torque ripples can be created when the system works under certain control cycles.A modified method that chose not one zero voltage vector but two different zero voltage vectors during one sector was proposed to suppress the torque ripples created periodically.The results of the simulation and experiments highlight the validation of the method proposed.
Key words:brushless DC motor;direct torque control;torque ripple;null voltage vectors
无刷直流电机(brushless DC motor,BLDCM)由于具有效率高、质量小、体积小并且结构简单的优点而被广泛应用于办公、家用、航空及交通领域。然而,无刷直流电机在拥有一系列优点的同时也伴随着一些缺点,比如转矩脉动特别是换相转矩脉动等。因此,抑制转矩脉动对改善系统的性能具有重要的意义。直接转矩控制(direct torque control,DTC)以电机的电磁转矩为直接控制变量,将快速控制转矩作为控制目标,从而可以使系统具有快速的动态响应,因此有很多学者研究无刷直流电机的直接转矩控制技术[1-10]。由于对电磁转矩观测的准确与否直接影响到系统性能的好坏,文献[11-12]构造了自适应滑模观测器,实时地调整观测器的参数,提高了转矩的观测精度。在高速情况下,无刷直流电机DTC系统也存在换相转矩脉动的问题,文献[6-7]在换相时控制3个开关管的导通与关断,从而使关断相的电流减小速率可控,以达到减小换相转矩脉动的目的。文献[10,13]通过变输入电压的方法来达到开通相电流上升率等于关断相电流下降率的目的,从而减小换相转矩的脉动。
本文依据文献[2,6-7]中的两相导电模式下的无刷直流电机直接转矩控制系统,提出一种抑制由零矢量引起的转矩脉动的方案。该改进方案在每个扇区的前半部分和后半部分分别使用2个不同的零矢量,以使换相时和换相前系统被施加的零矢量不变,从而可以抑制由于电磁转矩的过快减小而引起的转矩周期性脉动。
1 无刷直流电机DTC系统
无刷直流电机等效电路如图1所示,其中Ra,Rb,Rc分别为电机各相定子绕组的等效电阻;La,Lb,Lc分别为电机各相定子绕组的等效电感;ea,eb,ec分别为电机各相反电动势;uan,ubn,ucn分别为电机各相相电压;ia,ib,ic分别为各相相电流;Udc为直流母线电压。
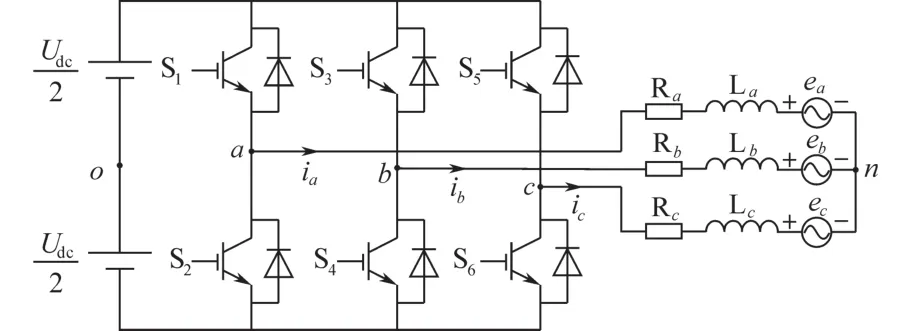
图1 无刷直流电机等效电路Fig.1 Equivalent circuit of the BLDC motor
假定Ra=Rb=Rc=R,La=Lb=Lc=L,则无刷直流电机电压方程为

电磁转矩方程为

式中:Tem为电磁转矩;ωrm为转子机械角速度。
在两相导电模式下,无刷直流电机直接转矩控制系统不需要同时构成转矩环和定子磁链环[2-3,8],其整体结构框图如图2所示[6-7]。

图2 无刷直流电机直接转矩控制系统整体框图Fig.2 Implementation scheme block diagram of the DTC strategy for BLDC motors
由于在非换相期间,有一相绕组关断,逆变器输出的有效电压矢量应为导通相相电压合成矢量[2,8],其定义及其在α-β两相静止坐标系中的分布如图3所示。

图3 导通相电压合成矢量及其在α-β平面中分布Fig.3 Active voltage vectors and their positions inα-βplane
图3括号中的二进制数字从左到右依次代表S1至S6的开关状态:“0”代表关断,“1”代表开通。6个有效电压矢量以及其相应的零矢量如表1所示,其中每一行包括1个有效电压矢量和该有效电压矢量所对应的2个零矢量[6-7,9],如第1行包括V1及其所对应的2个零矢量100000和000001。为了方便说明,为有效电压矢量和其对应的零矢量规定了序号N。在图3中,6个有效电压矢量将α-β坐标系均匀分成6个扇区Ⅰ至Ⅵ,每个扇区占60°(电角度)。

表1 有效电压矢量及相应零矢量定义Tab.1 Active voltage vectors and their corresponding zero voltage vectors
在图2中,首先依据霍耳信号Ha,Hb和Hc获得转子所在的扇区θ、转子所转过的电角度θr[14]以及电机转速ω,再由转子所转过的电角度θr计算出相反电动势,从而由式(2)得到电机的瞬时转矩;有了瞬时转矩就可以将其和速度调节器输出的转矩给定作比较,从而经过滞环控制器得到转矩控制信号τ;最后依据转矩控制信号τ和转子所在的扇区θ结合查询表(关于查询表的说明见后文)给系统施加有效电压矢量或零矢量以达到快速控制转矩的目的。
2 转矩脉动的产生及抑制方案
文献[6]和文献[7]分别提出了2种查询表方案,如表2和表3所示。在控制周期一定的情况下,由于零矢量的使用,文献[6]和文献[7]提出的2种查询表方案会使转矩在换相时减小过快,从而导致电磁转矩产生波动。下面对上述2种方案产生转矩脉动的原因进行详细的分析,并给出所提出的转矩脉动抑制方案。

表2 查询表1Tab.2 Selection table 1

表3 查询表2Tab.3 Selection table 2
2.1 转矩脉动产生原因
文献[6]、文献[7]分别提出的2种查询表方案中转矩脉动产生的原因相同,下面对2种情形进行分析。
1)转子处于Ⅵ区域且τ=+1时,系统被施加有效矢量V1(100001),此时电流流向示意图如图4所示。若下一控制周期τ=-1且转子仍处于Ⅵ区域,则系统被施加零矢量100000,电流流向示意图如图5所示,结合式(1),电路方程为

式中:E为反电动势的幅值。

图4θ=Ⅵ且系统被施加有效矢量V1(100001)时电流流向示意图Fig.4 Current flow diagram whenθ=Ⅵand the motor is imposed on active voltage vectorV1(100001)

图5θ=Ⅵ且系统被施加零矢量V0(100000)时电流流向示意图Fig.5 Current flow diagram whenθ=Ⅵand the motor is imposed on zero voltage vectorV0(100000)
在假定转速不变及忽略A相及C相电阻R的条件下有:

结合式(2)可得电磁转矩变化率为

2)转子处于Ⅵ区域且τ=+1时,系统被施加有效矢量V1(100001),此时电流流向示意图同样如图4所示。若下一控制周期τ=-1且转子处于Ⅰ区域,则系统被施加零矢量001000,电流流向示意图如图6所示,则电路方程为
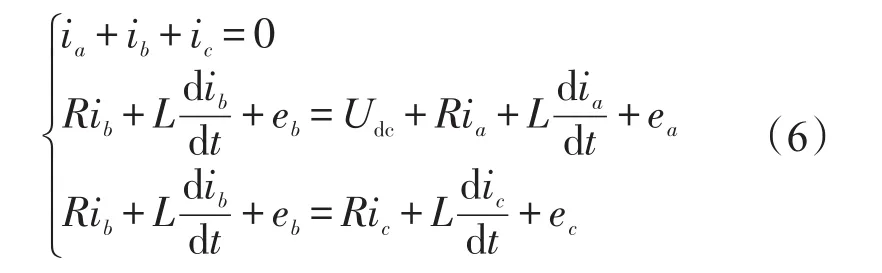

图6θ=Ⅰ,电机由Ⅵ→Ⅰ换相且系统被施加零矢量V0(001000)时电流流向示意图Fig.6 Current flow diagram whenθ=Ⅰand the motor is imposed on zero voltage vectorV0(001000)during sectorⅥto sectorⅠcommutation
在假定转速不变及忽略各相相电阻R的条件下有:

结合式(2)可得电磁转矩变化率为

在Udc>4E的情况下,比较式(5)和式(8)可得:

从表3中的方案可以发现,无论转子处于哪个扇区:在非换相区间内τ=-1时电机被施加相应的零矢量,则电磁转矩减小速率均和1)中分析的相同;在换相区间内τ=-1时电机被施加相应的零矢量,该零矢量不同于换相前电机被施加的零矢量,电磁转矩减小速率均和2)中分析的相同。
从表2中的方案可以发现,无论转子处于哪个扇区:在非换相区间内τ=-1时电机被施加相应的零矢量,则电磁转矩减小速率均和1)中分析的相同;在电机由Ⅵ→Ⅰ,Ⅱ→Ⅲ,Ⅳ→Ⅴ的换相区间内τ=-1时电机被施加相应的零矢量不同于换相前电机被施加的零矢量,电磁转矩减小速率均和2)中分析的相同,在电机由Ⅰ→Ⅱ,Ⅲ→Ⅳ,Ⅴ→Ⅵ换相时,若在电机刚进入换相区间内就有τ=-1,则此时开通相还没有电流,电磁转矩减小速率和1)中分析的相同。
因此,在控制周期不能足够小的条件下,表2中的方案在电机由Ⅵ→Ⅰ,Ⅱ→Ⅲ,Ⅳ→Ⅴ换相时,若τ=-1,则电磁转矩会迅速减小从而形成转矩脉动;而在电机由Ⅰ→Ⅱ,Ⅲ→Ⅳ,Ⅴ→Ⅵ的换相时,若τ=-1,则电磁转矩减小速率同非换相时的情况,从而不会形成明显的转矩脉动。对于表3中的方案若在换相时τ=-1,则电磁转矩会迅速减小,从而形成转矩脉动(无论哪一次换相)。
2.2 所提出的转矩脉动抑制方案
由于换相时系统被施加的零矢量不同于换相之前系统被施加的零矢量,而换相时系统被施加的零矢量使电磁转矩减小的速率是换相之前系统被施加的零矢量使电磁转矩减小的速率的2倍之多,在控制周期不能足够小的情况下,转矩会有较大的脉动。因此本文提出了新的查询表方案,如表4所示。该方案仍然使用无刷直流电机内的霍耳传感器给出的霍耳信号,依据文献[14]中的第一种方法估算转子所在的位置θr,并据此估算反电动势从而获得转矩,不同的是本文提出的方案需要利用转子所在的位置θr将图3中的每个扇区均分成2个小扇区,从而形成12个扇区。在图3中的每个扇区中系统被施加的零矢量是2个而不是1个,并且换相前和换相时系统被施加的零矢量是相同的,这就避免了图6所示的情况,从而也就避免了前面所说的转矩减小过快而造成的转矩脉动的产生。

表4 所提出的查询表方案Tab.4 Proposed selection table scheme
3 仿真结果及分析
为验证上述分析结论的正确性以及所提出方案的有效性,分别使用表2和表4的方案对图2的无刷直流电机直接转矩控制系统进行了仿真。图7为利用查询表1得到的电磁转矩波形及系统被施加的矢量序号N(见表1)的仿真波形。可以发现,每隔1次换相电磁转矩有明显的尖脉冲,这是由于换相前和换相时系统被施加的零矢量不同,从而转矩变化率近似满足式(9)造成转矩减小过于迅速。

图7 采用查询表1得到的电磁转矩波形及电机被施加的矢量序号NFig.7 Waveforms of electromagnetic torque andN,the serial number of vectors imposed on the motor,using selection table 1
图8为采用查询表4方案得到的电磁转矩波形及系统被施加矢量序号N的仿真波形,由于每次换相时及换相前系统被施加的零矢量相同,从而换相过程中及非换相时电磁转矩减小速率相同,电磁转矩不会过于迅速的减小,因此电磁转矩没有明显的尖脉冲。

图8 采用查询表4得到的电磁转矩波形及系统被施加的矢量序号NFig.8 Waveforms of electromagnetic torque andN,the serial number of vectors imposed on the motor,using the proposed selection table 4
另外,采用查询表4方案可以使同一桥臂上的2个开关管的开关频率在系统工作时保持一致,从而在提升系统稳定性的同时也避免了共模电压所带来的问题[7]。采用查询表4方案得到的开关管状态及系统被施加的矢量序号N的波形如图9所示,可以发现在1个电周期内开关管S1和S2的开关频率大致相同。

图9 采用查询表4方案得到的开关管S1和S2的状态及系统被施加的矢量序号NFig.9 Waveforms of the states of S1,S2andN,the serial number of vectors imposed on the motor,using the proposed selection table 4
4 实验结果及分析
为进一步验证所提出方案的有效性,在以DSP处理器(型号TMS320F2812)为控制器的实验平台上分别使用表2和表4的方案对图2的无刷直流电机直接转矩控制系统进行了实验。实验所用电机的相反电势波形接近正弦波,如图10所示。
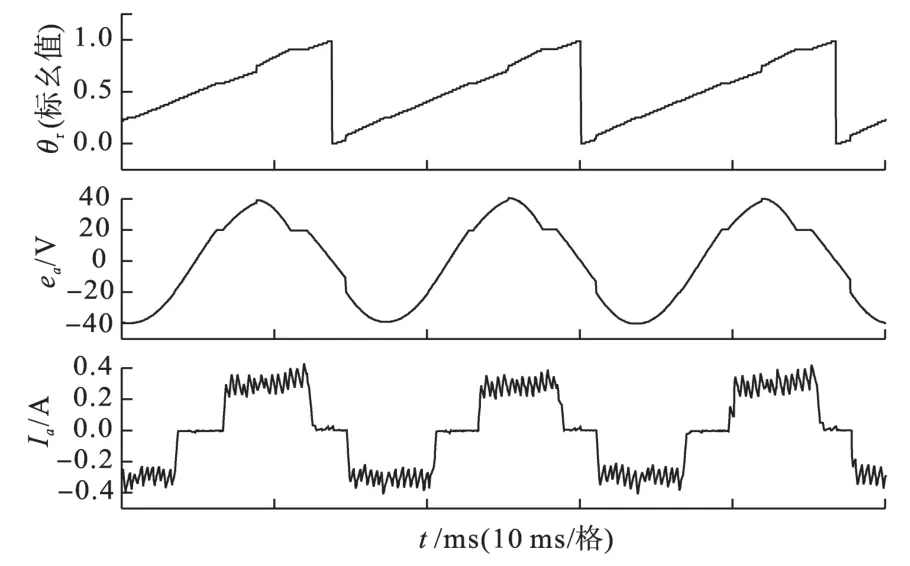
图10 估算的转子位置和A相反电势以及采样的A相电流Fig.10 Estimated rotor position,back EMF of phaseAand acquired current of phaseA
图10为使用HALL信号估算的转子位置和A相反电势以及采样的A相电流。其中估算的转子位置θr是以2π为基值的标幺值,从A相电流波形可以看出:在1个电周期内A相有三分之一周期被关断,系统工作在两相导通模式下。图11为利用查询表1得到的电磁转矩波形及系统被施加矢量序号N(见表1)的实验波形;图12为采用查询表4得到的电磁转矩波形及系统被施加矢量序号N的实验波形。比较图11和图12可以发现,采用所提出的查询表方案可以有效地避免因为换相前和换相时系统被施加的零矢量不同而导致电磁转矩减小过于迅速的问题,从而抑制了电磁转矩周期性的波动,使电机更加平稳的运转。

图11 采用查询表1得到的电磁转矩波形及系统被施加的矢量序号NFig.11 Waveforms of electromagnetic torque andN,the serial number of vectors imposed on the motor,using selection table 1
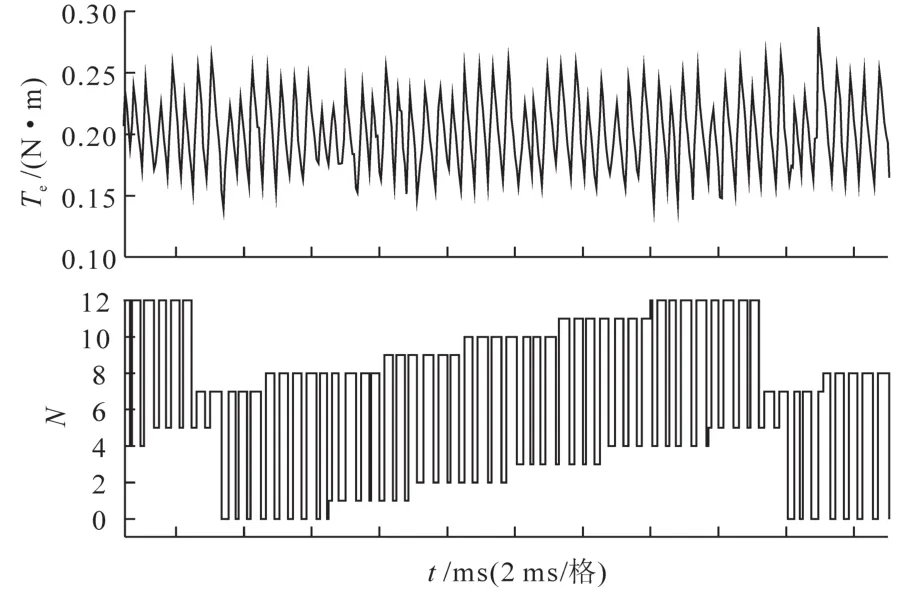
图12 采用所提出的查询表4方案得到的电磁转矩波形及系统被施加的矢量序号NFig.12 Waveforms of electromagnetic torque andN,the serial number of vectors imposed on the motor,using the proposed selection table 4
5 结论
本文为无刷直流电机直接转矩控制系统提出了一种改进的查询表方案。和文献[6-7]提出的查询表相比,所提出的方案通过在每个非换相区域内分别使用2种零矢量,使得τ=-1时电机在换相前以及换相时被施加的零矢量相同,从而避免了由于电机被施加零矢量时换相区域的电磁转矩相对于非换相区域的电磁转矩减小过于迅速而引起的电磁转矩周期性脉动。与此同时,所提出的查询表方案也能使逆变器同一桥臂上的2个开关管的开关频率一致,在提升系统稳定性的同时也不会产生共模电压平均值大于零的问题。
[1]Yong L,Zhu Z Q,Howe D.Direct Torque Control of Brushless DC Drives with Reduced Torque Ripple[J].IEEE Transac⁃tions on Industry Applications,2005,41(2):599-608.
[2]杨建飞,胡育文.无刷直流电机无磁链观测直接转矩控制[J].中国电机工程学报,2011,31(12):90-95.
[3]Ozturk S B,Toliyat H.Direct Torque and Indirect Flux Con⁃trol of Brushless DC Motor[J].IEEE/ASME Transactions on Mechatronics,2011,16(2):351-360.
[4]高瑾,胡育文,黄文新,等.六边形磁链轨迹的无刷直流电机直接自控制[J].中国电机工程学报,2007,27(15):64-69.
[5]Ozturk S B,Alexander W C,Toliyat H.Direct Torque Control of Four-switch Brushless DC Motor with Non-sinusoidal Back EMF[J].IEEE Transactions on Power Electronics,2010,25(2):263-271.
[6]Zhu Z Q,Leong J H.Analysis and Mitigation of Torsional Vi⁃bration of PM Brushless AC/DC Drives with Direct Torque Controller[J].IEEE Transactions on Industry Applications,2012,48(4):1296-1306.
[7]Masmoudi M,El Badsi B,Masmoudi A.Direct Torque Control of Brushless DC Motor Drives with Improved Reliability[J]. IEEE Transactions on Industry Applications,2014,50(6):3744-3753.
[8]胡育文,高瑾,杨建飞,等.永磁同步电动机直接转矩控制系统[M].北京:机械工业出版社,2015.
[9]杨建飞,胡育文,刘建,等.无刷直流电动机直接转矩控制零矢量分析研究[J].微特电机,2015,43(10):5-8.
[10]Mozaffari Niapour S A K,Tabarraie M,Feyzi M R.A New Eo⁃bust Speed-sensorless Control Strategy for High-performance Brushless DC Motor Drives with Reduced Torque Ripple[J]. Control Engineering Practice,2014,24(1):42-54.
[11]郭鸿浩,周波,左广杰,等.无刷直流电机转矩观测与电感自适应辨识[J].中国电机工程学报,2011,31(33):151-158.
[12]郭鸿浩,周波,左广杰,等.无刷直流电机反电势自适应滑模观测[J].中国电机工程学报,2011,31(21):142-149.
[13]孙冠群,蔡慧,牛志钧,等.无刷直流电动机转矩脉动抑制[J].电机与控制学报,2014,18(11):51-58.
[14]Capponi F G,Donato G D,Ferraro L D,et al.AC Brushless Drive with Low-resolution Hall-effect Sensors for Surfacemounted PM Machines[J].IEEE Transactions on Industry Applications,2006,42(2):526-535.
Improved Control Strategy for the DTC System of BLDC Motors
ZHOU Yunjie,PAN Feng,LU Qinxiong,YAN Genglong,HAN Rucheng
(Electronic Information and Engineering College,Taiyuan University of Science and Technology,Taiyuan030024,Shanxi,China)
TM351
A
10.19457/j.1001-2095.20170902
山西省自然科学基金项目(2010011024-3)
周运杰(1988-),男,硕士研究生,Email:yunjiez@126.com
2016-09-02
修改稿日期:2017-01-13
