极地船舶操纵性预报研究
2017-10-10李勇跃梁艳楠陆懿东
秦 尧 李勇跃 梁艳楠 黄 娟 陆懿东
(上海船舶研究设计院,上海201203)
极地船舶操纵性预报研究
秦 尧 李勇跃 梁艳楠 黄 娟 陆懿东
(上海船舶研究设计院,上海201203)
从北极航道出发,研究了北极航道对船舶操纵性影响的主要因素。介绍了船舶操纵性的模型试验和数值模拟方法,研究了船舶操纵性的性能指标和提高方法,并通过模型试验分析了上海船舶研究设计院(SDARI)设计的极地重载甲板运输船的操纵性性能。由于现行规范中对极地船的操纵性性能没有明确要求,建议设计中留足余量,以避免极地环境特殊性造成的操纵性性能降低所引发的突发状况。
极地航行;操纵性;模型试验;数值模拟
Abstract:According to the introduction of the polar channel,the main parameters that influenced maneuverability of vessels sailing in the polar region were studied in the paper.Model test and numerical simulation for prediction of maneuverability were presented.Criterion and improvement strategy of maneuverability were researched.The maneuverability performance of polar class heavy transport deck carrier vessel designed by SDARI was analyzed by means of model test.It was concluded that because of a lack of criterions of maneuverability of polar vessels from any rules,enough margin should be given to avoid emergency caused by complex polar environment.
Keywords:sail in the polar region;maneuverability;model test;numerical simulation
0 前言
随着全球变暖所引起的海冰大面积消退,使得北极海上通航逐渐成为可能,而航道的通航将会对世界的经济、政治、军事、能源等格局产生深远影响。在北极航道通行带来机遇的同时,也给计划航行于此航道上的船舶带来挑战。由于海冰的消融和风、流等作用,海冰之间会形成曲折蜿蜒的冰区水道,并会不断发生收缩、扩散和位移等变化,造成船舶计划航线需根据海冰的阻挡而随时改变,同时船舶也需要频繁改变航向、航速以尽可能利用冰间水道和薄冰区。由此可见,北极航道对通航船舶的操纵性要求远远高于普通航区航行的船舶,在设计时应予以特殊考虑[1]。
西北航道具有气候恶劣、温度很低、冰情严重等特点,导致该航道通航条件特别差。本文主要从北极东北航道的水域特点和气象环境等方面,对该航道上以舵为航向控制方式的船舶操纵性进行研究,主要分析了北极航道对船舶操纵性影响的因素、操纵性预报的数值模拟和模型试验及实船试验方法,并针对上海船舶研究设计院(SDARI)设计的极地重载甲板运输船,通过模型试验分析其操纵性性能。
1 北极航道对船舶操纵性的影响
1.1 北极航道限制
由于北极高寒、多暴风雪、海冰反射等原因,造成冬季北极冰量极大,基本覆盖整个海域;而盛夏季节,海冰开始消融裂解,并在风、流的作用,海冰之间会形成曲折蜿蜒的冰间水道。船舶在冰中航行操纵,应尽量利用冰间水道和薄冰区,由于冰间水道可航水域十分狭窄曲折,船舶需频繁改变航向,对船舶的操纵性要求提高。
东北航道大部分航段位于俄罗斯北部沿海的北冰洋离岸海域,海岸线曲折复杂,边缘海区及海湾浅而宽。航行于浅水中的船舶常伴有下沉和纵倾,会对其快速性和操纵性产生明显的不利影响,可能导致触底和搁浅事故的发生,浅水效应成为北极航道航行船舶操纵性设计中不可忽视的问题[2]。
1.2 海域冰量多范围广
由于北冰洋几乎被岛屿和大陆架环抱,海冰难以扩散,覆盖范围极广,如图1所示。度量浮冰对船舶操纵性的影响最重要的参数为冰量,通常采用十分法来表示。根据视界范围内海面上浮冰覆盖的比例量,冰量可以分为10级,如表1所示。冰量在1/10以下时,船舶可以自由航行;冰量为1/10~5/10时,船舶需根据冰况调整航向;冰量为5/10~8/10时,将对船舶航行造成严重的障碍;当冰量达到8/10以上时,需在破冰船的协助下航行。
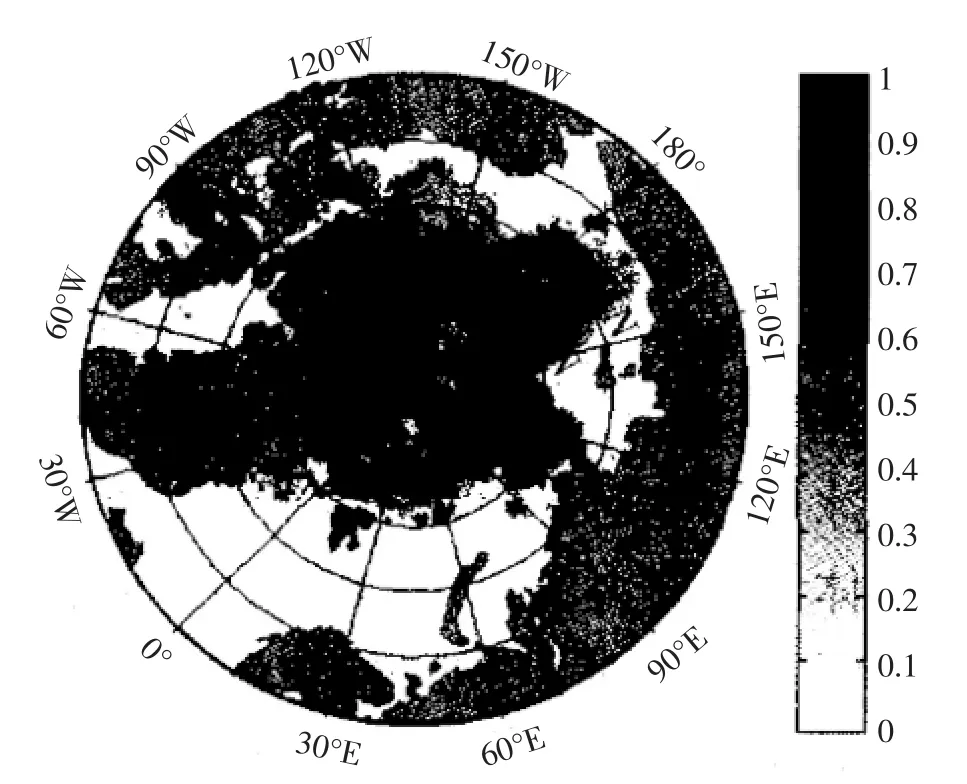
图1 8月份北极海冰密集度
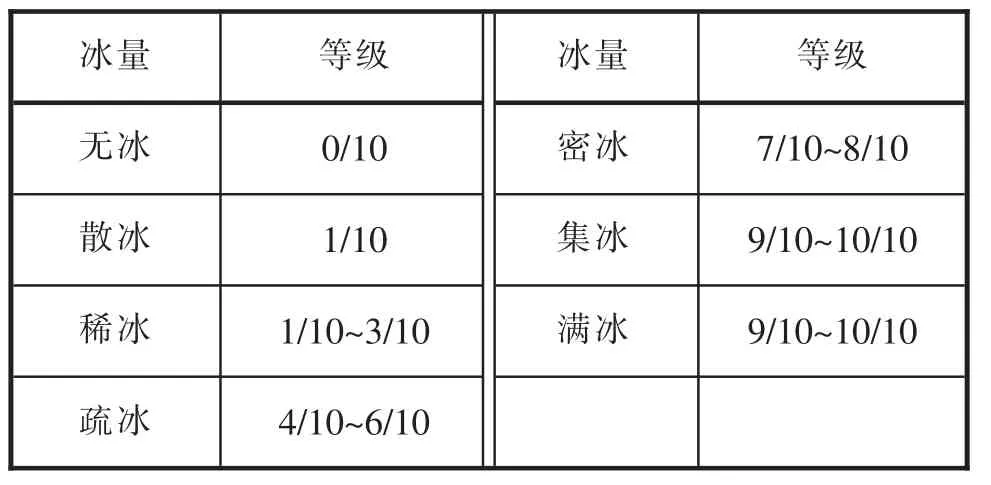
表1 冰量等级表
浮冰是北极航道的显著特征,也是影响该航道航行船舶操纵性的关键因素。船舶航行于大面积的冰区时,其航向稳定性由于受船体两边冰的作用而有所改善,但转向却变得困难,会出现小舵角转不动,大舵角一旦转动又很难回舵的现象。
1.3 冬季寒冷温度低
受温室效应的影响,北极地区的气温呈不断上升趋势,但跟其他海域的环境温度相比,北极地区仍然极其寒冷。统计结果表明,北极的年平均气温为-23℃,冬季平均气温达到了-34℃,夏季的气温介于-2~0℃之间。在最寒冷的1月,北极航区的气温在-5℃至-35℃之间。
气温对航行船舶的影响主要表现在低温使海水结冰并依附于船体上,增大船舶的惯性力和惯性力矩,从而影响船舶的操纵性能。依附于船体上的冰层对船舶操纵性的影响与附连水的效果相似,但作用力要大很多。在操纵性评估时,可参照附加质量的表达方法来计算。
1.4 航道能见度低
能见度是指船员在船舶上能够分辨目标轮廓的最大距离,对船舶的航行安全具有直接影响。在北极地区,影响能见度的最主要因素是海雾。尤其是在适宜通航的夏季,随着海冰的融化,开阔水域和冰间水道不断增加,水气交换就会形成平流雾,而且夏季北极航道大风天气极少,辐射雾、蒸发雾也随时可以产生。夏季的东西伯利亚海和楚科齐海,其50%~70%的时间为雾天;白令海的情况更为严重,夏季有60%~70%的时间为雾天。
相关研究统计表明,当能见距离低于4 km时,船舶会产生一定的航行安全隐患;而当能见距离降低至1 km以内时,事故发生的概率将急剧增大。因此,在设计中应充分考虑能见度对船舶操纵性能的影响[3]。
1.5 风速
风主要作用于水线以上的主船体和上层建筑,会使船舶在行驶过程中产生偏航。通常将6级风作为影响船舶航行安全的标准风。现有的科考观测数据表明:在北极地区,冬季多风,夏季少风,大风的概率较小,全年的平均风速为4~6 m/s,最大风速极少超过25 m/s。
2 船舶操纵性性能指标
2.1 船舶操纵性要求
船舶操纵性是指船舶用其控制装置来改变或保持其运动速率、姿态和方向的能力。船舶操纵性的优劣关系到航运安全及船舶的经济性和快速性[4]。
操纵性良好的运输船舶应具备:
1)足够的航向稳定性;
2)中小舵角良好的应舵性能;
3)符合要求的大舵角回转性能;
4)适中的主机停车和主机逆转的停船性能。
2.2 船舶操纵性试验条件
根据IMO MSC/Circ.1053的要求,船舶的操纵性性能需要通过回转试验、初始回转试验、Z形试验以及全速倒车试验的测量值来体现,船舶的状态及试验条件如下:
1)深水、无限水域;
2)平静环境;
3)满载无纵倾状态;
4)以试航速度稳态进入。
2.3 船舶操纵性指标
具体的操纵性指标要求见MSC.137(76)。试验内容及测量指标如下:
2.3.1 回转试验
给定航速,在保证安全的条件下,船舶以左/右35°舵角或者最大设计舵角航行,记录航迹,测量船舶的纵距、战术半径等参数;该试验主要影响船舶的大舵角回转性能。衡准要求,回转试验的纵距应不大于4.5倍船长,战术直径应不大于5倍船长。
2.3.2 初始回转试验
船舶以左/右10°舵角航行时,首向角离初始航向改变10°时,记录航迹。衡准要求,船舶的纵距应不超过2.5倍船长。
2.3.3 Z形试验
船舶向左/右舷操舵开始,使舵角随首向角的改变而变化,船舶的航线近似Z形,记录试验过程中的第一、第二超越角的大小;根据舵角可以分为10/°10°Z 形试验、20°/20°Z 形试验, 该试验主要影响船舶中小舵角的应舵能力。衡准要求 (L为船长,v为试验航速):
1)10°/10°Z形操纵试验测得的第一超越角应不超过:
10° L/v<10 s
20° L/v≥30 s
[5+1/2(L/v)]° 10 s≤L/v<30 s
2)10°/10°Z形操纵试验测得的第二超越角应不超过:
25° L/v<10 s
40° L/v≥30 s
[17.5+0.75(L/v)]° 10 s≤L/v<30 s
3)20°/20°Z形操纵试验测得的第一超越角应不超过 25°。
2.3.4 全速倒车停船试验
船舶以一定航速稳定前进,从发出全速倒车指令开始,直至船舶对水移动停止,记录航迹;衡准要求,试验测得的航迹应不超过15倍船长,若因排水量过大而使该衡准值不合实际时,主管机关可修改该衡准值,但仍不应该超过20倍船长。
对于极地航行的船舶,根据上节所述,受到北极航道各种因素的影响,操纵性的要求高于常规船舶。由于没有现行规范明确提出对极地船操纵性的要求,为适应复杂多变的极地航行环境,需要在设计过程中留出足够的操纵性性能余量,以避免复杂环境导致的操纵性性能损失而影响船舶的航行安全。
3 船舶操纵性预报方法
操纵性预报的方法主要包括模型试验和数值模拟两种。模型试验包括自航模型试验和约束模型试验,其成本相对较高,但是准确性较好,目前使用较为普遍;数值模拟主要分为MMG运动方程和CFD仿真分析两种手段,但MMG运动方程的模拟准确度取决于水动力参数计算方法的准确性,而CFD方法对计算机性能和计算方法的要求较高。
3.1 模型试验
3.1.1 自航模型试验
自航模型试验是指船本身有螺旋桨、舵以及相应的动力系统和控制系统,可以模仿实船在水池中自由航行。通过试验可以直接测得各种运动参数,能够较为直观地比较分析船舶的操纵性能。
3.1.2 约束模型试验
约束模型试验是指在水池中采用平面运动机构等设备,强制船模作规定的运动,以测定作用其上的水动力和力矩,通过计算确定所需的各水动力导数,之后可以通过理论分析或仿真计算等手段深入分析船舶的操纵性性能。
3.2 数值模拟
3.2.1 MMG运动方程
船舶在水面上的运动,符合一定的力学运动规律,为研究船舶的操纵运动规律,MMG小组经过近十年的研究,提出了MMG数学模型,即分离式模型,如式(1)所示[5]:
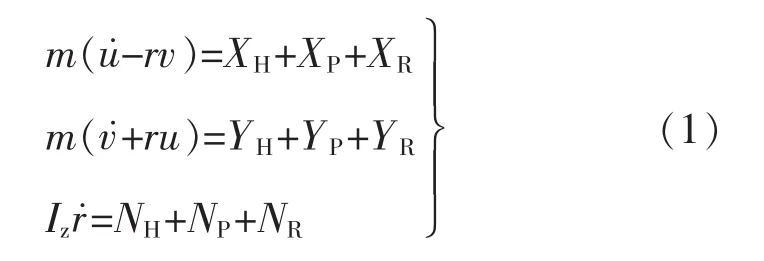
式中:X、Y、N 的下标 H、P、R 分别表示船体、螺旋桨、舵。由于螺旋桨引起的横向力YP及其对重心的力矩NP很小,一般略去。
在该方程的基础上,分别计算船体水动力、桨力及舵力,一般可通过近似理论公式、统计回归公式或数据库数据等方法求出,如可能还可用专门的约束船模试验求得。在极地船的操纵性分析中,还可以通过冰模试验、有限元分析及经验公式等手段计算冰载荷,补充在方程的右端项,提高分析的准确性。
由于船体、螺旋桨和舵的水动力本身又是船体运动速度和加速度的函数,故需用计算机进行数值求解,即求出船舶操纵运动过程中每一计算步长时的运动、加速度值,再通过对时间的积分运算求出相应的运动速度、船位、航向角和姿态角等,在时间域内计算得到船舶的操纵性性能指标。该方法可以有效减小自由自航船模操纵性预报中存在的尺度效应,但模型中每项水动力及舵桨力的计算公式能否与实船接近一致决定了其预报精度。
3.2.2 CFD数值分析
计算流体力学在船舶流体力学领域中的地位在不断上升,其长远发展目标是为船舶水动力设计提供全雷诺数的数值模拟工具,结合船舶推进装置,预报实尺度船舶在风、浪、流条件下的航行性能。现阶段主要分为应用Reynolds的时均NS方程(RANS)以及直接模拟(DNS)、大涡模拟(LES)等分析方法[6]。
CFD方法相比于试验方法,更为省时省力,并能够完成实船所不能完成的船舶操纵试验。然而,现阶段CFD方法由于涉及的参数众多,对计算机性能的要求较高,准确性和通用性还有待考证,在使用过程中需要特别注意。
4 船舶操纵性提高方法
4.1 船舶主尺度
船舶的主尺度对操纵性的影响有强有弱,如表2所示。如何合理选择船舶的主尺度,成为决定其操纵性性能的关键因素。因此,在主尺度确定阶段,应兼顾船舶的操纵性要求进行选型,力求使船舶的操纵性性能最优。
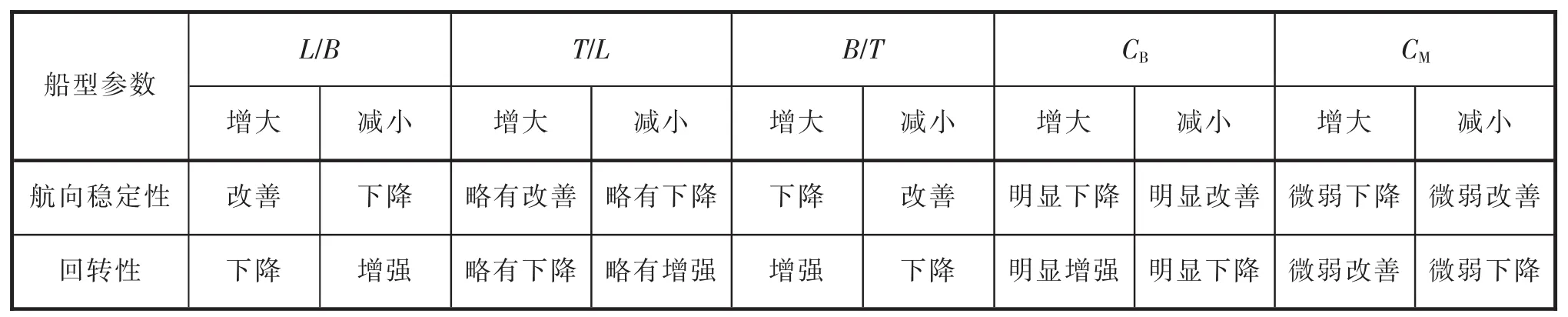
表2 船舶主尺度对操纵性的影响
4.2 横剖面形状
船体横剖面形状对操纵性有一定影响。首部横剖面形状影响微弱,尾部横剖面形状影响较大。一般来说,尾部横剖面形状对航向稳定性由优到劣(回转性相反)的顺序如下:

4.3 水下侧面积
船舶的水下侧面积和形状对航向稳定性有极大影响,尾部侧面积形状的影响尤为显著。当侧面积系数一定时,形心越往后,航向稳定性越好(回转性越差);当形心一定时,侧面积系数越大,航向稳定性越好(回转性越差);装有球首,相当于增加了中纵剖面的首部面积,会使航向稳定性变差,但是回转性会有提高。
4.4 舵面积
船舶的舵面积系数大,舵效好,舵面积系数小,舵效变差。北极航道航行船舶在进行舵设计时应选取更大的舵面积系数,然而舵面积过大会造成船舶回转时的横倾超过允许范围,因而不能为实现较高的回转性能盲目地增加舵面积。
舵面积的确定可根据所航行海区通常的能见度范围、水深吃水比、浮冰密度及气温等进行调整。调整原则为:能见度越低,所需的舵面积系数便越大;水深吃水比越小,所需的舵面积系数便越大;浮冰密度越大,所需的舵面积系数便越大;气温越低,所需的舵面积系数便越大。
以SDARI设计的“极地重载甲板运输船”为例,船舶航行于大面积的冰区时,其航向稳定性由于受船体两边冰的作用而有所改善,因此可以更多地考虑回转性能的要求,以提高冰区操作的灵活性。故该船主尺度选取偏向良好的回转性要求,且水下侧面积形心较为偏中,尾部横剖面形状采用丰满的U形;规范要求舵叶总面积为22.5 m2,而实船配置的单舵叶面积为18.3 m2,按照双桨双舵的布置,总的舵叶面积达到36.6 m2,较规范要求的总舵叶面积增加了1.6倍多。
5 极地重甲板运输船操纵性模型试验
本文针对SDARI设计的极地重载甲板运输船进行操纵性的模型试验。该试验根据IMO MSC/Circ.1053 和 MSC.137(76)进行,主要进行了 10/°10°Z 形试验 (包含初始回转试验)、20°/20°Z 形试验、35°舵角回转试验、全速倒车停船试验等项目,并将试验测量结果与IMO的操纵性衡准进行对比。
该操纵性试验在瑞典水池进行,试验航速对应实船的15.7 kn,模型与实船的尺度比为1∶42。图2、图3所示为试验模型照片。该模型未考虑首部侧推的影响,尾部的舵采用半悬挂舵,螺旋桨转向为内旋。该船的主要参数如表3所示。
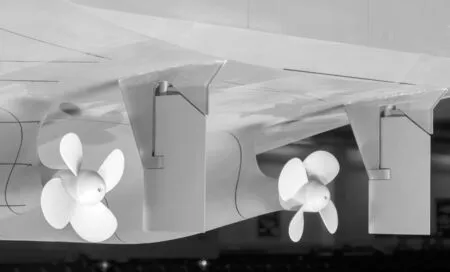
图2 极地船舵桨模型
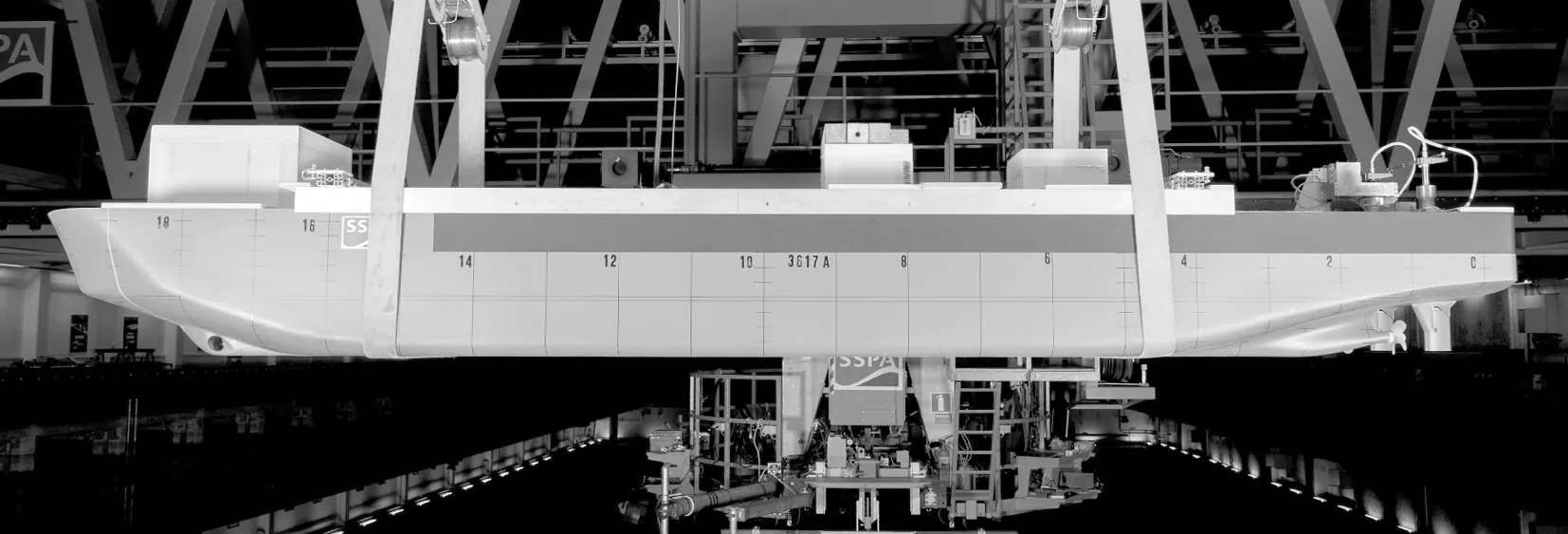
图3 极地船试验模型
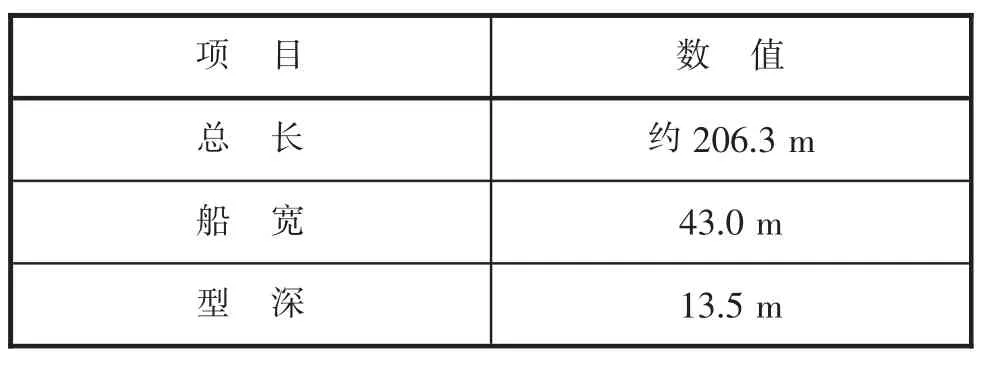
表3 极地重甲板运输船主尺度
试验结果及其与衡准的对比值如表4~表7所示。
通过分析可知:对于冰区航行船舶,由于航道限制,相较于大舵角的回转性能,更加注重中小舵角的应舵能力和航行稳定性,因此对于Z形试验的性能要求较高。从试验结果可以知,Z形试验的第一超越角和第二超越角的衡准值/试验值均大于1.9,满足要求且留有约一倍余量;初始回转纵距/Lpp及回转试验的纵距/Lpp和战术直径/Lpp的衡准值/试验值均大于1.2,满足要求且留有约20%的余量,均符合设计和使用要求,可为极地航行船舶操纵。

表4 满载吃水工况回转试验(35°舵角)
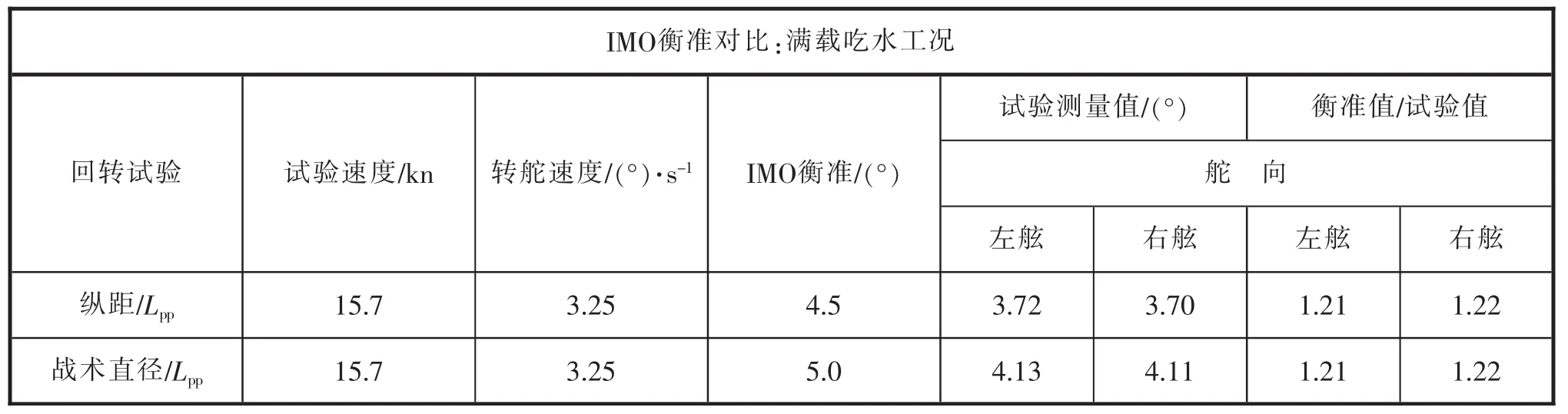
表5 设计吃水工况回转试验(35°舵角)
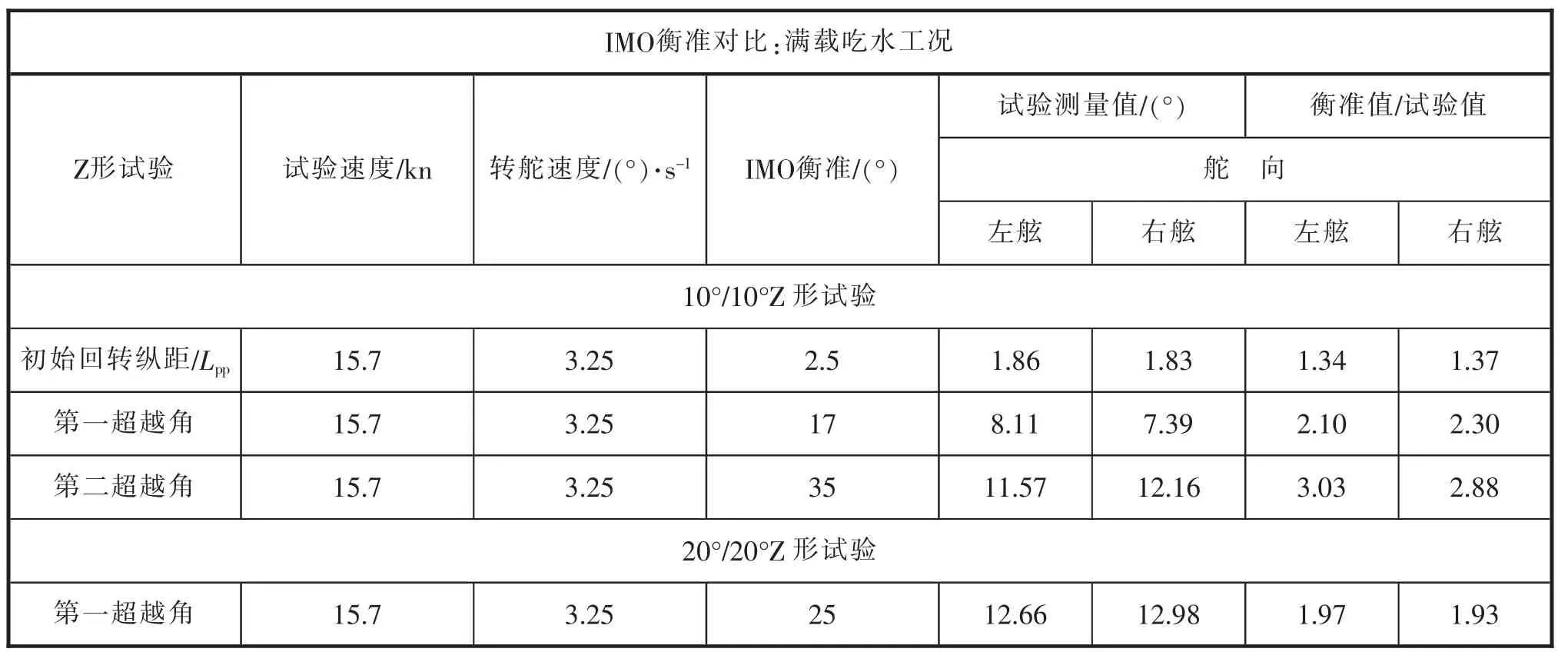
表6 满载吃水Z形试验
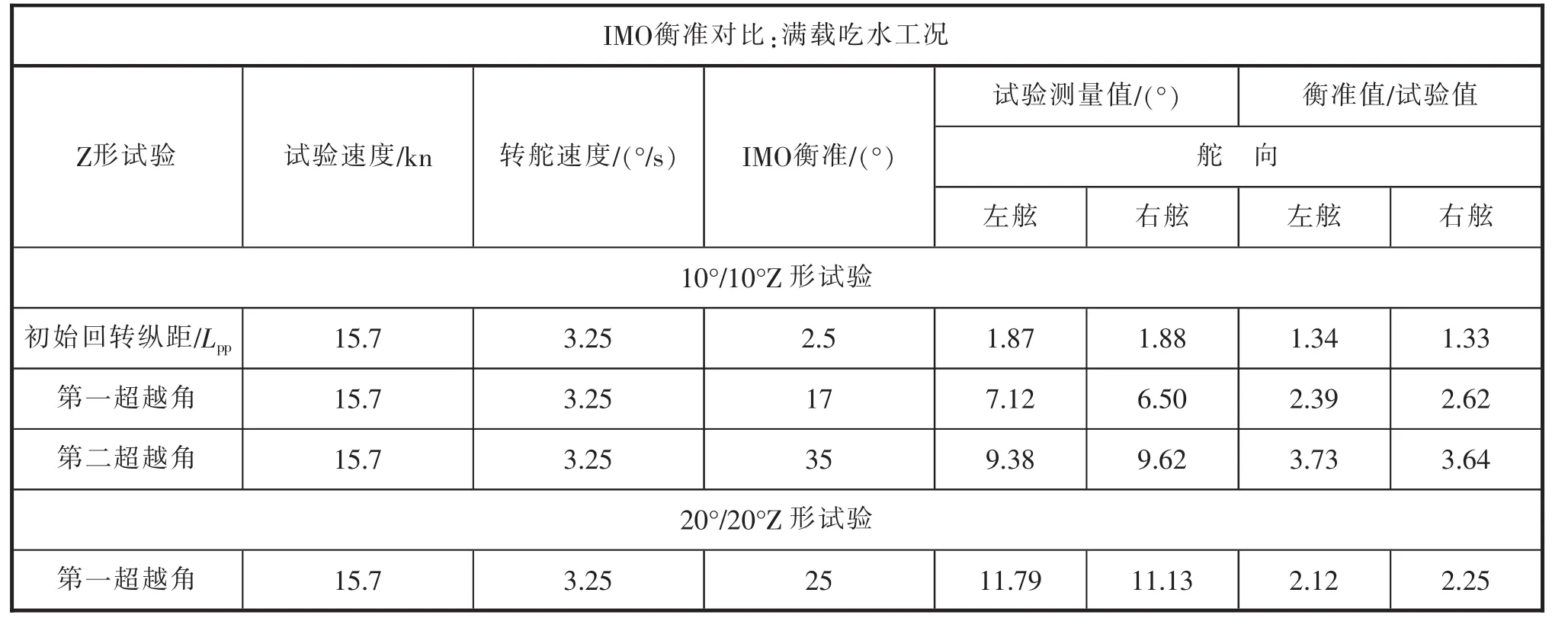
表7 设计吃水Z形试验
6 结语
船舶操纵性是船舶的重要性能之一。本文从极地环境出发,分析北极航道的水域特点和气候环境,研究了北极航道对船舶操纵性影响的主要因素。针对SDARI设计的极地重载甲板运输船,通过模型试验分析其操纵性性能,验证了该船设计过程中根据实际使用需求在相应的操纵性性能指标上留有足够的余量,以避免极地环境特殊性造成的操纵性性能降低所引发的突发状况。
该船操纵性试验得到的第一超越角和第二超越角的衡准值/试验值大于1.9,回转纵距/Lpp和战术直径/Lpp的衡准值/试验值均大于1.2,可为极地航行船舶操纵性性能指标的余量设计提供借鉴。
[1]Kaj Riska.Design of Ice Breaking Ships[G].Course Material,NTNU,2011.
[2]张东江.北极航区分析及极区船舶总体性能研究[D].哈尔滨:哈尔滨工程大学,2012.
[3]胡晓芳,蔡敬标.北极航道航行船舶操纵性设计需求分析[J].中国舰船研究,2015,10(3):37-44.
[4]陈可越.船舶设计实用手册——总体分册[M].北京:中国交通科技出版社,2007.
[5]唐元东.基于CFD方法的船舶旋回仿真研究[D].大连:大连海事大学,2015.
[6]赵鹏举.船舶拖航仿真研究[D].哈尔滨:哈尔滨工程大学,2008.
Research on Prediction of Maneuverability of Vessels Sailing in the Polar Region
QIN Yao LI Yong-yue LIANG Yan-nan HUANG Juan LU Yi-dong
(Shanghai Merchant Ship Design and Research Institute,Shanghai 201203,China)
U674.81
A
1001-4624(2017)01-0020-07
2017-02-07;
2017-06-20
秦 尧(1989—),男,工程师,从事船舶与海洋工程总体设计工作。
李勇跃(1988—),男,工程师,从事船舶性能分析及线型设计工作。
梁艳楠(1981—),女,高级工程师,长期从事船舶与海洋工程总体设计工作。
黄 娟(1984—),女,工程师,从事船舶与海洋工程总舾设计工作。
陆懿东(1978—),男,研究员,长期从事船舶与海洋工程轮机设计工作。
