举高作业车工作斗独立调平控制系统
2017-10-09邹发良苏亮
邹发良,苏亮
(长沙中联消防机械有限公司,湖南 长沙 410300)
举高作业车工作斗独立调平控制系统
邹发良,苏亮
(长沙中联消防机械有限公司,湖南 长沙 410300)
举高作业车工作斗调平性能的好坏,是保障作业安全、考核车辆工作性能的关键环节。通过分析现有非独立调平系统存在的短板,设计了一套高性能的工作斗独立调平系统。系统采用独立于臂架运动的液压动力源,同时设计了与之配套的闭环电气控制系统。独立的油源有效的解决了油路长、压力波动大造成的响应延时问题。而电控系统采用的前馈控制的变参数PID控制方法,加快了调平油缸的响应速度,同时能够更好的控制误差。整个系统的实时调平过程中,误差有效的控制在1°以内。与原有的非独立调平系统相比,极大的提高了工作斗调平的实时跟随效果。
举高车;工作斗;独立调平;控制系统;变参数PID
Abstract: The leveling performance of the basket of lift cars is a key factor for guaranteeing operation safety and evaluating operational performance of the vehicle. On the basis of an analysis of the weaknesses of current non-independent leveling systems, this paper designs an independent high-performance leveling system for the basket, which uses a hydraulic power source independent of arm movement. Furthermore, it designs a matched closed-loop electric control system. The independent oil source effectively resolves the problem of response delay due to long oil lines and large pressure fluctuation. Variable parameter PID control combined with feed-forward control in the electronic control system help to raise the response speed of the leveling cylinder and achieve better error control within 1o throughout real-time leveling of the whole system. Real-time tracking effect of the basket leveling is thus improved greatly as compared with former non-independent leveling systems.
Keywords: lift car;basket;independent leveling;control system;variable parameter PID
0 引 言
随着城市化进程的不断加快,高层建筑越来越多,作为高层建筑灭火救援主战装备的举高类消防车,应用也越来越广泛。带工作斗的云梯消防车和登高平台作业车,也随着国家对消防事业的投入逐年加大,大批量的装备到消防队伍中。车辆配备的工作斗调平功能,是用来保证车辆在高空作业时工作斗始终保持水平的状态,进而保证人员在斗内操作或救援时的安全。连续稳定的调平效果及完备的工作斗安全保护,可以为在斗内操作及救援的工作人员提供良好的作业体验。因此,工作斗调平性能的好坏,成为了保障作业安全,考核车辆工作性能的关键环节[1]。
工作平台的调平方式经历了从自重调平到电液调平的发展过程[2]。举高消防车工作高度高,其工作斗最常采用的调平方式是机械反馈电液控制调平机构[3]。这种方式对控制元件和电液压系统的要求较高。调平系统主要由倾角传感器、PLC(可编程控制器)、电液比例阀、调平油缸等组成[4]。通过倾角的闭环控制,PLC控制电液比例阀驱动调平油缸,保证倾角始终趋近水平0度,从而实现工作斗在臂架运动过程中始终保持水平的状态。目前,这种方式被国内外大部分举高车生产厂家使用。
如图1所示,上述机械反馈电液控制调平方式,通常其液压油源用主油泵或双联泵从下车经过中心回转,拖链系统向调平油缸输送压力油,使铰结在调平油缸活塞杆上的工作斗进行翻转和调平。其中,主油泵或双联泵装在底盘主车架上,它输出的压力油要经过液压管路、经过中心回转、拖链中的拖链胶管才能到达调平阀,从而推动调平油缸中的活塞和活塞杆,使铰结在活塞杆上的工作斗翻转和调平。
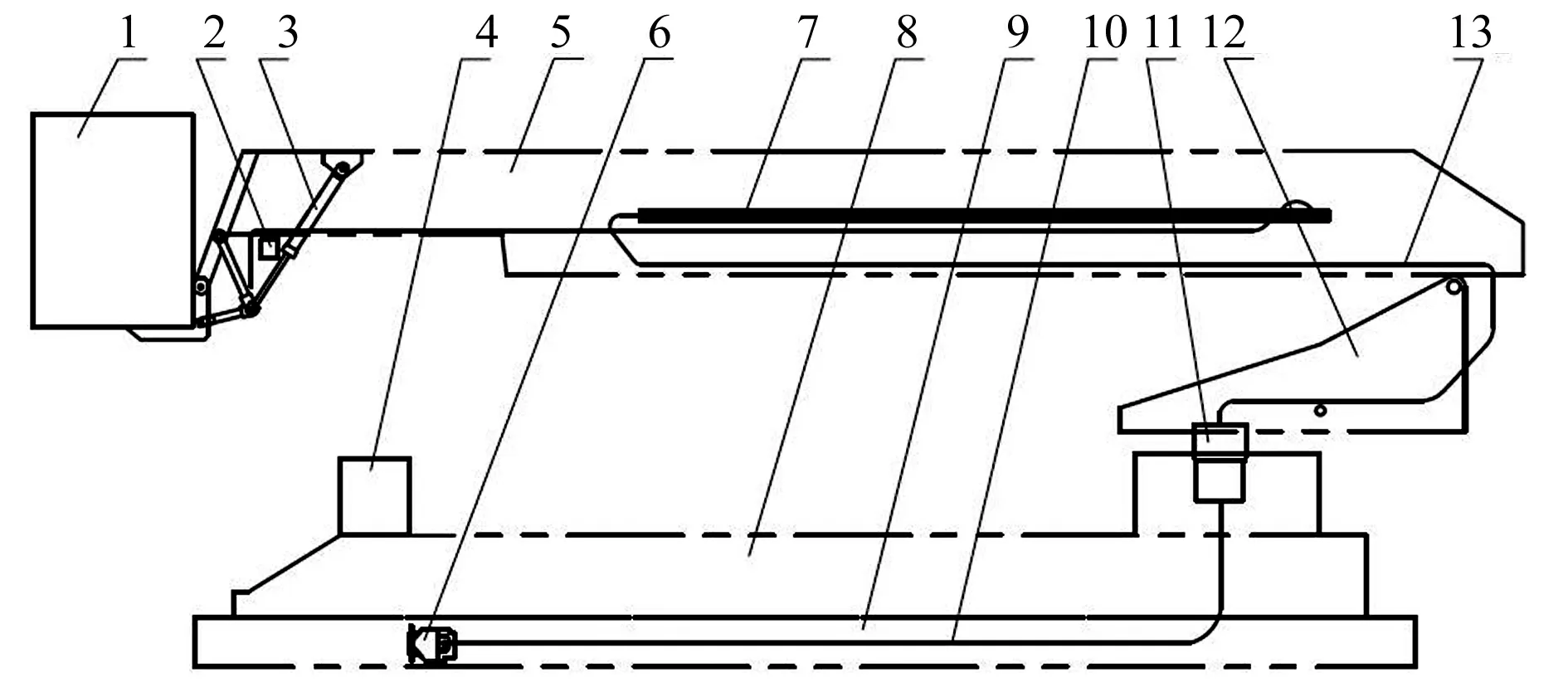
1.工作斗 2.调平阀 3.调平油缸 4.液压油箱 5.梯架 6.主油泵或双联泵 7.拖链 8.副车架 9.底盘主车架 10.液压管路 11.中心回转 12.转台 13.拖链胶管图1 工作斗非独立调平系统布置图
这种调平方式其液压管路,特别是拖链胶管长,因此带来了压力损失大,调平反应速度慢的问题,同时还存在成本较高、安装复杂、维修麻烦等诸多弊端,随着使用时间的增长,管路老化后,上述问题也会愈发严重。
同时,由于臂架运动速度的不可预测性,梯架伸出后挠度、刚度的变化、工作斗内载重量不同时引起的晃动、液压系统执行机构本身的响应时滞性,普通的闭环控制并不能很好地保证控制精度,在实际应用时,工作斗出现来回调整、过调等现象,无法保证连续稳定的调平输出,影响车辆性能。
国外的知名举高车厂家(如:马基路斯)为了解决上述问题,采用了独立调平系统,从而使得整车的操作性能更加稳定。国内的厂家对于斗调平的研究相对落后,部分厂家甚至还使用链条链轮式调平机构针对现有的状况,本文设计开发的工作斗调平及控制系统,采用一种独立调平的液压设计方式,为工作斗调平提供独立油源,解决了使用拖链胶管的非独立系统线路长、反应慢的问题,同时根据独立液压系统设计了一套专用、可靠的电气控制系统,结合前馈自适应PID调节方法,有效地提升了工作斗调平快速性、稳定性。与旧系统比较,具备结构简单易安装维修、节能节约成本等优点。通过将该项技术应用与产品车,可以有效地提高工作斗调平的稳定性,提升产品性能。
1 工作斗独立调平液压系统
独立调平的液压系统部分区别于非独立系统最大的特点,就是设计了独立的油源,在本设计中,通过在工作斗调平比例阀附近设置直流电动泵及液压油箱,当工作斗需要调平作业时,用直流电动泵直接给调平阀供油。
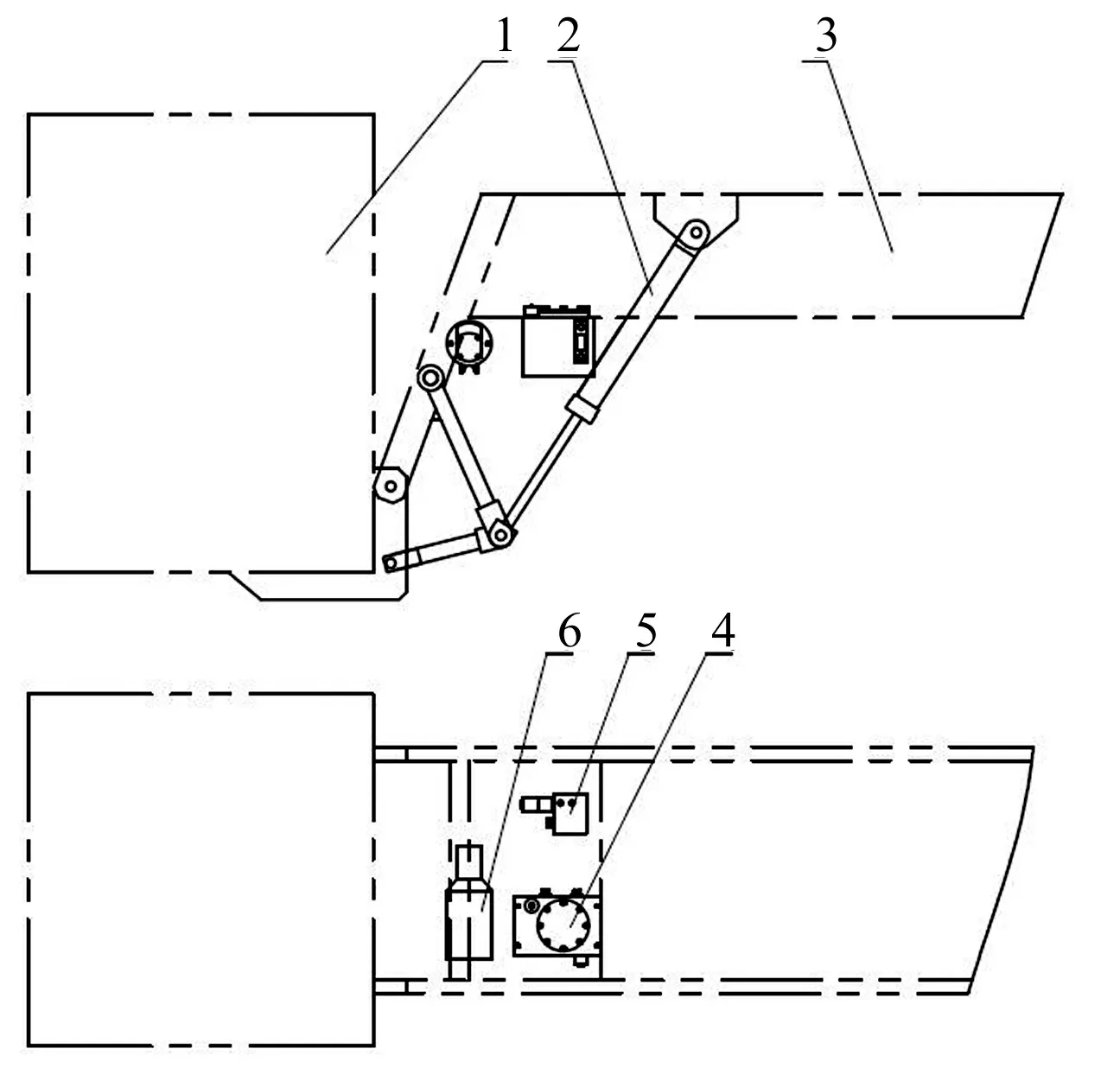
1.工作斗 2.调平油缸 3.梯架 4.液压油箱 5.调平阀 6.直流电动泵图2 工作斗独立调平系统布置图
图2所示为工作斗独立调平系统布置图,直流电动泵、液压油箱、调平阀均安装在梯架前端,在工作斗附近。直流电动泵从液压油箱中吸油,产生压力油,操纵调平阀,可使压力油进入调平油缸,推动活塞及活塞杆运动,从而使铰结在活塞杆上的工作斗翻转和调平。这种设计方式有如下好处:
(1)不需要拖链及拖链胶管,对于规格越高的车辆,节省的拖链及胶管也越长,安装简单;
(2)到达工作斗调平阀液压管路短,压力损失小,受温度影响小;
(3)独立就近的油源,与长管路软管供油的方式相比,压力响应速度快,无共用油路,压力波动小
(4)易维护、易维修、显著降低成本。
2 工作斗独立调平电气控制系统
电气控制系统需要完成对直流电动泵、调平比例阀的实时控制。电控系统依托的电气元件包括:控制器、接触器、倾角传感器。
本方案中,整个电气控制系统的结构框图如图3所示。

图3 工作斗独立调平控制系统框图
控制器接收处理斗倾角传感器的信号、臂架操作手柄信号及臂架运动数据,其中斗倾角传感器数据可以准确获知工作斗当前角度与水平值的偏差,误差越大,说明工作斗前倾或后倾越厉害。臂架操作手柄信号可以通过总线传输到调平控制器,控制器可以实时监控用户手柄的操作状态,从而反映臂架运动的速度趋势。臂架运动数据,通过若干传感器数据的汇总,获得臂架角度、臂架姿态数据。
电机接触器控制直流电动泵的运行,为了保证压力油供应的快速性,控制器接收到手柄操纵信号时,就开启接触器,让电动泵运行。同时,也只有在臂架变幅比例阀完全关闭时,才断开接触器,从而保证臂架变幅运动的整个过程中,工作斗调平压力油油压提早建立与最后关闭,保证了调平压力油始终处于供给状态。
通过控制比例阀的开口度,控制斗调平油缸的速度慢,可以让斗时刻保持或无限逼近水平零点,保证臂架运动过程中,工作斗始终保持水平状态。
常规的调平控制方法通过倾角传感器闭环获得调平控制数据,具体控制原理如图4所示。
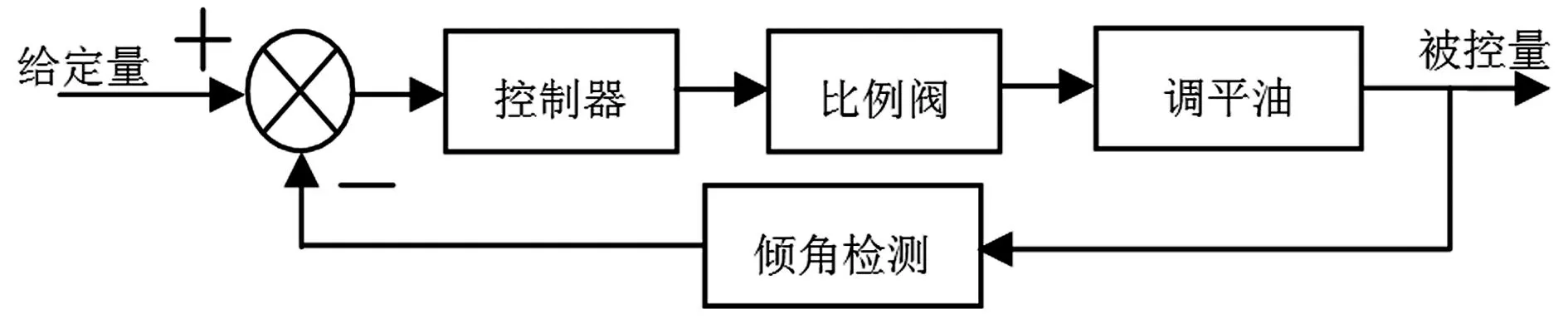
图4 调平闭环控制
通过对比倾角传感器及水平0°时的数据,获得偏差,然后由控制器根据偏差大小调整比例阀输出控制调平油缸运动实现对工作斗调平的控制。
由于工作斗调平控制的最终执行部件是液压部件,其存在滞后大、反馈控制不及时等问题。同时,工作斗需要时刻跟随臂架运动速度变化造成的角度变化,随动性高,单纯的闭环PID无法可靠保证调平性能,设计采用了加入前馈控制的优化控制方案。
前馈控制和反馈控制的复合控制系统结构不仅可以保持系统稳定,大幅减小稳态误差,而且对抑制可测量扰动十分有效[5]。如加入结合臂架油缸铰点数据的变幅比例阀门开口,将变幅油缸线速度换算为角速度,保证了运动轨迹的可监控[6]、比例阀死区数据, 提前加入比例阀预开启量,可以进一步加快调平响应速度。
由于工作斗调平实时性要求高,对误差控制、连续调平性都有很高的要求。整个调平过程中要求工作斗动作尽量连续、误差控制范围小。而由于臂架速度变化跨度大、随机性强,一套PID参数整定较为复杂,难免造成超调量过大、调节时间长等问题。为了获得更好的控制效果,采用变参数PID控制方法,结合当前调整误差范围,实时选择不同组合的Kp、Ki、Kd参数。针对偏差范围较小、一般、较大的情况,整定不同的三组PID参数,提升了每个偏差范围整定参数的调整精度,实现优化的变参数PID控制(如图5所示)。

图5 变参数PID复合控制方法

图6 工作斗独立调平及控制系统实验平台

图7 独立调平系统构成

图8 工作斗独立调平电机
图6所示为工作斗独立调平及其控制系统的实际车上安装测试情况,圈内标记部分为电控系统,图7中,圈内标记部分为液压油箱和调平阀组,图8中,圈内标记部分为电动液压油泵。
3 测试及结果分析
3.1 实验方案
通过手柄来控制臂架变幅运动,通过控制器采集变幅角度变化、斗倾角变化、手柄给定等数据,同时调试匹配参数,测试分析独立调平系统的调平控制性能。
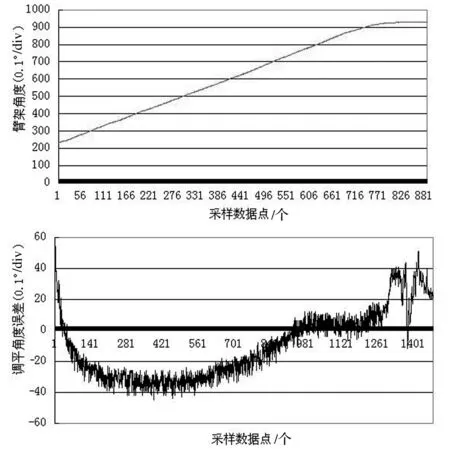
图9 空载上升
图9中,上部分曲线为臂架变幅角度变化,反应臂架变幅上升的过程。下部分为斗倾角误差实时数据,Y轴坐标为0值时,代表此时斗倾角为0度,为其他值时,换算的方法为Y轴值/100,例如,Y轴值为100时倾角为100/100=1度,同时,当Y轴值为负时,对应的为工作斗负角度。角度为正时,工作斗下倾,角度为负时,工作斗上仰。
3.2 结果分析
分析图9工作斗空载时的变幅上升曲线,工作斗调平误差能够较好的保持在±0.4度以内。

图10 空载下降
同时分别测试工作斗空载时变幅下降、工作斗满载时变幅上升、工作斗满载时变幅下降时的系统调平性能。分别对应图10、图11、图12。可以看出,上述的工况,工作斗调平效果稳定,误差能有效地控制在1度以内,仅在满载下降的工况,臂架刚启动时由于惯性较大引起的短时间晃动,系统整体控制效果良好。图13、图14为非独立调平系统的测试结果,空载上升和满载下降的两种工况中分别出现了启动误差大、调平过程不稳定,存在持续晃动等问题。图13非独立调平空载上升启动时,存在很明显的反应慢的问题,误差峰值达到了3.5°,表现为工作斗调平反应慢,倾斜厉害。图14非独立调平满载下降过程中,整个工作斗不能够很好地维持稳定,存在长时间持续的向上向下的过调整的问题,工作斗表现为持续的抖动现象。
因此,相较于非独立系统,工作斗独立调平及其控制系统能够更快地响应角度变化,有效地控制调平误差,保证持续调平的稳定性。
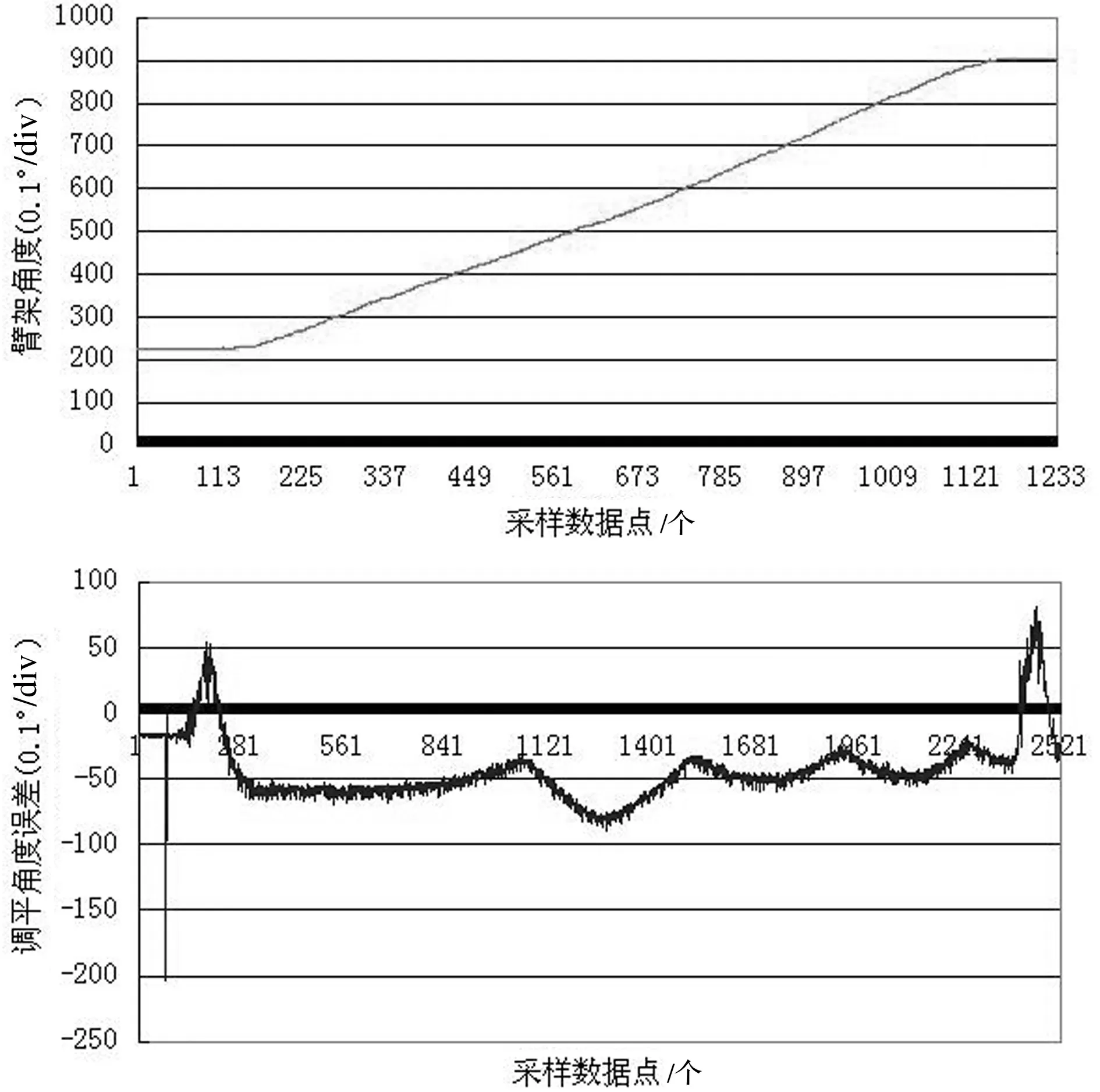
图11 满载上升

图13 非独立调平空载上升
4 结束语
工作斗独立调平系统通过设立独立于臂架运动的工作斗调平液压系统,选择快速的电气控制系统、优化的闭环控制方法,搭建了一套高性能的系统,独立的液压系统解决了长管路带来的压力损失大、响应速度慢的问题。同时,结合系统特性设计的前馈控制和反馈控制的复合控制方法,通过加入结合臂架油缸铰点数据的变幅比例阀门开口、比例阀死区数据, 提前加入比例阀控制量等设计,可以加快调平响应速度,有效提升调平效果。多组不同工况下的试验结果表明,相比常规的非独立调平,本方案的工作斗调平具备稳定连续、调节误差范围小的优点。
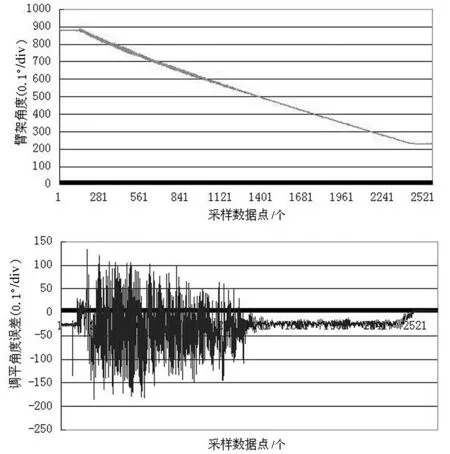
图14 非独立调平满载下降
[1] 张进良.国外消防车简介-举高消防车[J]. 消防技术与产品信息,2010,29(3):80-82.
[2] 田丽敏, 郭维斌.全折叠臂小型高空作业车的调平机构[J]. 工程机械,2003,34(2):34-36.
[3] 周先觉.高空作业机械工作斗调平机构探讨[J]. 建设机械技术与管理,1998,10(1):17-18.
[4] 熊忆,刘召华,周磊.高空救援消防车工作斗自动调平系统设计[J]. 专用汽车,2014,33(7):82-84.
[5] 一种基于前馈补偿的PID轨压控制设计方法[J]. 电子科技,2014,27(6):146-149.
[6] 朱来福.高空作业平台伸缩臂变幅及调平机构的配合分析[J].建筑机械化,2015,36(9):42-45.
An Independent Leveling System for the Baskets of Lift Cars
Zou Faliang, Su Liang
(Changsha Zhonglian Firefighting Machinery Co., Ltd., Changsha Hunan 410300, China)
10.3969/j.issn.1000-3886.2017.03.032
TP271+.4
A
1000-3886(2017)03-0106-04
定稿日期: 2016-09-12
邹发良(1971-),男,湖南长沙人,学士,工程师,主要从事举高消防车结构设计。 苏亮(1985-),男,湖南长沙人,硕士,电气工程师,主要从事举高消防车电气设计。