一种月球探测载荷设计方案
2017-09-29官开楦
官开楦


摘要 本文提出一种进行月球探测载荷设计方案。利用人形机器人进行动作演示和技术验证,并提出“登月机器人宇航员”新名词。该方案也可认为是利用人形机器人宇航员替代真人宇航员进行一些载人登月预演,加上验证人形机器人本身的技术。另外还探测重力加速度。该方案有目标创新性,技术继承性,工程可实现性,兼具科普意义、科学意义、爱国主义教育意义和经济意义,各项意义重大。
关键词 载人登月;月球探测;月球探测载荷;登月宇航员;机器人;空间机器人;人形机器人;登月机器人宇航员
中图分类号 TP242 文献标识码 A 文章编号2095—6363(2016)13—0023—07
1背景
现在各国竞相开发人形机器人。有10kg以上的(以下称大型),3kg~10kg的(以下称中型),也3kg以下的(以下称小型)。大型的,比如本田公司的ASIMO,日本产业技术综合研究所的HRP系列人形机器人,NASA的人形机器人Valkyrie,韩国科学技术院(KAIST)的人形机器人Hubo。小型的,比如日本近藤科学公司的KHR 3HV(17自由度,约1.5kg),中国广东优必选公司的AlphalS(图1)(16自由度,1.65kg),同公司的Alpha2(图2)(20自由度,不到3kg)。值得一提的是,我國广东优必选公司的Alpha小型人形机器人,在2016春节晚会惊艳亮相,引起不少关注。
人形机器人具有人类使用的工具,环境不经过改造就可直接利用,容易使用遥控操作的特点,又无需生命保障系统,在深空探测中将大有作为。能在宇航员到达天体目标前执行先驱者探测,也能和宇航员协作完成任务。研究高度智能的人形机器人来帮助,甚至替代宇航员进行危险的深空探测任务是趋势。但基于现有的一些约束条件和目前的技术水平,直接上复杂的人形机器人不太现实。
所以,笔者提出一种身高40cm以下,具有18个自由度的,3kg以下的可爱的小型人形机器人,穿上无生命保障系统的简易航天服,进行动作演示和技术验证的方案。并提出“登月机器人宇航员”新名词。虽小型,但能完成多项动作演示和技术验证。动作演示能激发科技学习创作热情和爱国主义热情,传播科学精神,推动科学普及。验证的技术具有科学意义,也具有承上启下的作用,为未来的中国载人登月和建设月球基地等打下技术基础。所以该方案也可认为是利用人形机器人宇航员替代真人宇航员进行一些载人登月预演,加上验证人形机器人本身的技术。另外还探测重力加速度。该方案有目标创新性、技术继承性、工程可实现性。兼具科普意义、科学意义、爱国主义教育意义和经济意义。
2探测或演示目标
2.1动作演示
1)唱国歌;2)挥动小国旗,问候“我是第一个登上月球的机器人宇航员,向全中国人民和全世界人民问好”;3)做打太极拳动作(双脚固定);4)随音乐节奏做舞蹈表演;5)向小朋友、中小学生讲解月球的科普知识;6)展示月面,月球的天空,着陆器内部的图像;7)与小朋友、中小学生对话;8)做单摆实验,在月球的地面上测量月球背面的精确的重力加速度。并验证日本,美国卫星在月球背面的重力场观测数据。
高真空中没有空气阻力可做高精度测量,而且需要的器材简单轻便。实际上在月面时可以用类单摆的实验装置,实验装置可以做到很轻很小。但原理一样。在月球上只要利用摄像头得到的图像就可以得到摆动周期,从而计算出月面上的重力加速度。利用人形机器人的机械手来摆动实验装置。得到的月面上的重力加速度可以验证日本,美国卫星在月球背面的重力场观测数据。
为了达到科普目的,把实验原理、实验装置、实验方法、实验结果载入高中课本。想补充说明的是,载入高中课本,不只可以科普,培养学生的创造性思维,还可以让高中生知道我国的嫦娥探测工程成就,增强民族自豪感和爱国热情。高中阶段培养此种自豪感,无疑对奠定热爱祖国的人生观,对培养立志长大后把自己的聪明才智献给祖国的观念有巨大推动作用。另外想补充说明一点,不止有科普意义,把结果发表到权威科学杂志上还可达到科学目的。关于实验原理等笔者稍后会再加说明。
2.2技术验证
1)验证地月间的声音处理、编码、压缩、传输技术。通信时间延迟,通信容量有限的情况下的声音传输技术验证,为将来的载人登月提供帮助。简易航天服由防热层,防辐射层,密封层组成,里面充满空气,可以传播声音,模拟真人宇航员穿着航天服,进行声音方面的技术验证。
2)验证机器人的声控技术、语言理解技术、语音处理技术、会话技术。
3)验证机器人的图像处理技术(基于图像的机器人自主操作技术)。
4)验证地月间的视频处理、编码、压缩、传输技术。
5)验证机器人的遥控操作技术。从地球上遥控在深空工作的机器人技术是重大关键技术之一。遥控机器人从工具盒中拿出,释放,收起摆球,遥控机器人拿起,挥动,收起小国旗,可以成为验证机器人的遥控操作技术的好手段。遥控方案分为3个阶段,难度逐渐增加,达到比较全面掌握在深空工作的多自由机器人技术。
6)验证人类控制与机器人自主控制的分配协调控制技术。
7)验证有模拟时延情况下的遥控技术。用软件模拟时延1min,5min,10min,20min,40min等,进行遥控。40min的情景类似地球与火星间的通信情况,所获得的遥控技术可用于接下去的我国的火星探测机器人上。
8)验证机器人本身的各项技术。验证硬件器材技术,多自由度建模技术,多自由度控制技术,力控制技术。验证有多个自由度,类人形的机器人在月面上的控制技术,机构匹配技术,智能信息处理技术。验证在约1/6地球重力的月面上的机器人技术。为将来更加复杂,高度智能的机器人宇航员提供技术帮助。
9)验证机器人的动作规划技术。
10)验证机器人的服务基本技术(目视检查,设备操作,精密操作,工具操作技术)。通过释放摆球,拿起,挥动,收起小国旗,通过照着陆器内部图像进行验证。为研究将来在月球基地进行服务的机器人打下技术基础。endprint
11)验证机器人的控制等软件地面可更新技术。
12)验证机器人与人对话交流时,讲话与身体动作的协调配合技术。
13)验证机器人的监视技术。把着陆器看成一个小无人月球基地,把机器人看成在月球基地内部服务的物体,通过机器人头部的摄像头,把着陆器内部的其他仪表仪器的状况的视频传输到地面,起到监视的作用。为将来的月球基地建设提供帮助。
14)验证国产芯片龙芯CPU和自主嵌入式操作系统在登月机器人上的应用技术。据悉,国产芯片龙芯CPU有足够好的性能,强烈建议使用国产CPU和操作系统。发挥投资航天,带动产业的作用。
15)验证空间机器人模拟仿真技术。地面上的电脑模拟仿真模型与实际的机器人相互验证。
16)验证简化航天服的热防护技术。
17)验证机器人与无生命系统宇航服的协调匹配使用技术。
3探测方案
3.1设备组成
设备组成的示意图如图3所示。
设备主要由4大部分组成:1)登月机器人宇航员;2)航天服;3)外盒;4)Joystick。机器人外面穿着航天服。航天服无需生命保障系统,主要由防热层,防輻射层,密封层组成,可做到轻薄。里面充满空气,可以传播声音,模拟真人宇航员穿着航天服,进行声音方面的技术验证。充满空气,也有缓冲作用,可防止在发射,着陆的一系列过程中撞坏机器人。穿着航天服的人形机器人的脚用螺丝固定在外盒上。外盒由轻薄,坚硬,透明的材料做成,通过弹簧固定在月面着陆器里面。Joystick主要是在地面上遥控在月面上的机器人。下面详细描述四大部分设备。
3.1.1登月机器人宇航员
硬件方面,主要的构件如图4所示。
各构件的用途等如表1所示。
机器人宇航员的自由度的示意图如图5所示。
图5的左边,右边分别为自由度的正面图和侧视图。肩膀3个自由度,手臂1个自由度,脚部3个自由度。颈部有2个自由度。图5中未画出终点的手的自由度。终端的手的自由度如图6所示,有1个自由度,能够夹紧,释放操作对象。如此,机器人共有18个自由度。能满足本次任务要求。
软件方面,由嵌入式操作系统,必要的机器人控制软件,语音处理软件,图像处理软件等。建议采用有自主产权的国产嵌入式操作系统。
3.1.2航天服
航天服为无生命支持功能的简易航天服。硬件方面,主要的构件如图7所示。
航天服主要由头罩、服装、通信盒组成。头罩可由轻质塑料做成。前面要求透明,要保证机器人宇航员的头部摄像头能够拍摄到航天服外部的物体。服装由纺织材料做成。主要由防热层、防辐射层、密封层组成,可做到又轻又薄。里面充满空气,可以传播声音,模拟真人宇航员穿着航天服,进行声音方面的技术验证。充满空气,也有缓冲作用,可防止在发射,着陆的一系列过程中撞坏机器人。防热层用于使航天服里面的机器人处于一个合适的温度范围。防辐射层用于遮挡宇宙的辐射线。密封层用于使航天服处于密封状态,使航天服里面的空气不外漏。
通信盒位于航天服的背后。通信盒的各构件的用途等如表2所示。
软件方面,无需复杂的软件,只需一些实现喇叭,麦克风,温度传感器等功能的软件。由单片机处理。
3.1.3外盒
外盒由轻薄,坚硬,透明的材料做成,固定在月面着陆器里面。穿着航天服的人形机器人的脚用螺丝固定在外盆上。
外盒上可标些点,线,供标定,定位等使用。外盒上面的四角和中间都钉上挂钩,看着陆器的倾斜情况选用一个挂摆球。
硬件方面,主要的构件如图8所示。
外盒的各构件的用途等如表3所示。
软件方面,无需复杂的软件,只需一些实现控制光源,4个摄像头,把视频信号传输到着陆器等功能的软件。由单片机处理。
3.1.4在地面遥控操作用控制器
遥控操作用控制器可以用Joystick,也可以用其他的Haptic Interface设备。在地面的控制器可看成为Master,在月面上的人形机器人可看成为Slave。组成Master-Slave系统,实现遥控操作技术验证。
3.2探测原理
3.2.1动作演示原理
下面对单摆实验的原理进行详细地描述。其他的动作演示的原理容易明白,不再赘述。
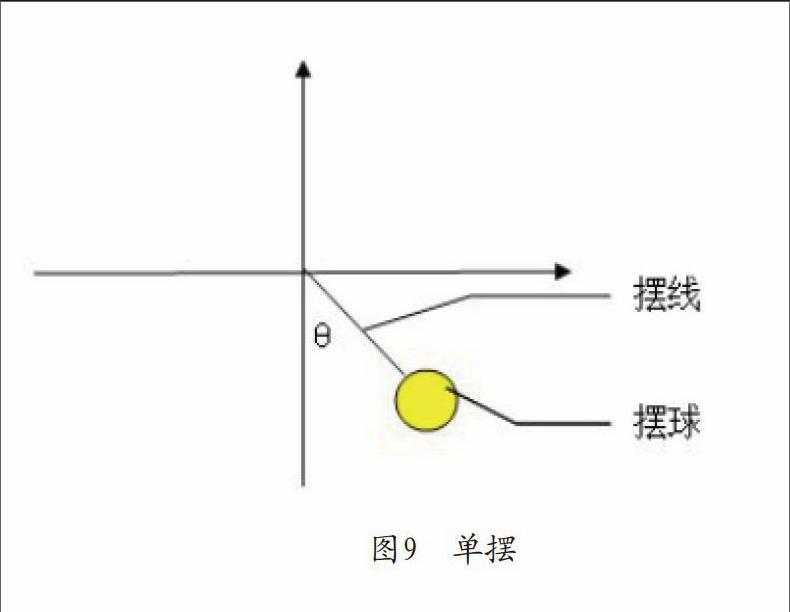
1)在月面上利用单摆实验测量重力加速度的原理。单摆由摆球和摆线组成,如图9所示。
此处的α就是单摆的最大摆角。
由(11)式、(28)式可知,只要能测得月面上单摆的振动周期T,就可以求出月面上的重力加速度。而振动周期T可以利用外盒的摄像头得到的图像得出。从严谨的科学角度来说,用(28)式计算,发表学术论文。而从科普的角度来说,用(11)式计算,把实验原理、实验装置、实验结果载入高中课本。利用人形机器人的机械手来摆动实验装置而达到做实验的目的。得到的月面上的重力加速度可以验证日本,美国卫星在月球背面的重力场观测数据。
3.2.2技术验证原理
下面对遥控操作的原理(方案)进行重点描述。其他的关于会话,音频信息处理,视频信息处理,机器人控制等的技术验证的原理在此写的话变成一本厚厚的书不现实,而且可以从有关书籍、论文获得,所以笔者觉得没必要在此叙述。
1)遥控操作的原理。对遥控操作,笔者建议的方案是分3个阶段进行。复杂度逐渐增加。以便比较全面地掌握,验证遥控操作的技术。
(1)第1阶段
操作方式:利用Joystick方式。
控制方法:单向控制(Unilateral Control)。
操作设备:比如可以用游戏用的Joystick。endprint
特点:只把操作者的动作指令传给机器人。无力反馈信息。
(2)第2阶段
操作方式:利用主从方式(Master-Slave)。
控制方法:双向控制(Bilateral Control)。
操作设备:比如可以利用Haptic Interface设备。
特点:设想周围环境信息可知。有力反馈信息。
(3)第3阶段
第3阶段是第2阶段的拓展,与第2阶段类似,但设想周围环境信息不足情况下进行遥控操作。
操作方式:利用主从方式(Master-Slave)。
控制方法:双向控制(Bilateral Control)。
操作设备:比如可以利用Haptic Interface设备。
特点:设想周围环境信息不足。有力反馈信息。
有时间延迟情况下的控制方法。对有时间延迟情况下的遥控操作的控制方法的研究比较多,比如文献[1]、[2]、[3],笔者在此不做多述。人形机器人的全身运动的遥控方法。实现对人形机器人的全身运动的遥控方法,可参考文献[4]。
3.3安装方式
外盒安装在着陆器里面。通过弹簧固定在着陆器里面。
3.4工作模式
在月夜进行休眠模式。
3.5与探测器平台接口要求
没有特殊要求。
1)供电接口。要求在非休眠模式,在工作时供电。估计不用超过20W。
2)通讯接口。与外盒,简易航天服内的单片机通信时用Ethernet有线通信。与人形机器人的通信可以用Ethernet有线通信,或者无线通信(Bluetooth或WiFi)。
3)机械接口。由于人形机器人的高度约35mm左右,估计外盒的高度要40mm。外盒的长度,宽度,估计不要少于15mm,如果条件允许,可以再加长点,让人形机器人有更多的伸展手脚的空间。
4)热接口。设想是,外盒有热接口通道,由着陆器上的热控设备提供初步热控,把外盒控制在±80℃范围内。如此,人形机器人由简易航天服的防热层提供2次防熱保护,简易航天服只要能承受±80℃就行。
4项目创新性
1)国际上首次把人形机器人送上月球;2)国际上首次把人形机器人用于月球探测;用人形机器人进行操作实验;3)国际上首次在月面上用人形机器人模拟真人登月宇航员进行技术实验;4)国际上首次把人形机器人与无生命支持系统宇航服协调匹配使用;5)国际上首次实现地球上的人类与月球上的机器人对话;6)国际上首次实现地球外星球上机器人用机器人挥动一个国家的国旗;7)国际上首次实现用机器人在地球外星球上向地球上全世界人民问好;8)国际上首次在月面上遥控人形机器人做实验;9)国际上首次在月面上用单摆实验测量重力加速度;10)设想载荷在月球背面的话,可做到国际上首次在月球背面测量重力加速度。
5科学或科普意义
5.1科普意义
1)申请发明专利和外观专利。人形机器人的外观设计成可爱有特色的,让小朋友、中小学生喜欢的。
2)在各类科技馆展示登月机器人宇航员;并提供亲自遥控机器人体验挥动小国旗,操作实验等动作的机会;并可以让登月机器人宇航员与参观人员对话;可以让登月机器人宇航员当讲解月球科普知识的讲师。
3)建议举行一次全国的小朋友、中小学生科普课,让登月机器人宇航员实时讲解月球科普知识;一起唱国歌;一起做体操;一起唱国歌时,由登月机器人宇航员担任旗手缓慢逐渐举起中国人民共和国国旗。或者可以录制一张让登月机器人宇航员讲解月球科普知识,且演示操作单摆实验的录像片,在高中物理课里播放。也即让人形机器人当物理老师给高中生上一节物理课。开启人形机器人使用新时代。
4)授权产家生产,销售机器人零部件,套件,或整个人形机器人。地面版本可比月球版本更简单。价格不高,易学习。可组装,可编程。激发学习,创作,创新热情。可配合出教材。也可制作人形机器人穿或未穿航天服的时候一样的外观的可爱的布娃娃,或塑料玩具。达到普及科学知识,传播科技创新精神效果。
5)生产,销售地面版本的人形机器人的零部件,套件,或整件,销售具有登月机器人宇航员外观的布娃娃,塑料玩具,可以形成一个机器人零部件加工,布娃娃制作,塑料玩具制作的产业链,具有可观的经济效益。在各类大学生,中小学生的实验室,机器人爱好班可以买机器人的零部件,套件,自己学习组装,并编程。据说中国未入大学的孩子有上亿人,可爱的人形机器人,布娃娃,塑料玩具具有巨大的市场潜力。而且以后可以像手机一样普及,人手一个或每个家庭一个。可以达到巨大的经济规模。兼具科普意义和经济意义。
6)把漂亮的图片载入科普课本。开设专题网站进行宣传。也可在网上提供虚拟仿真体验。达到科普目的。
7)可做到公开人形机器人的一些API接口给高校学生,有关研究人员,甚至中小学生。提供验证不同的遥控操作技术,机器人控制技术,动作规划技术等的平台。具有无限的可能性。起到很大的科普作用。
8)把文化与科技联系起来。建议把登月机器人宇航员命名为“后羿1号”。后羿是古代传说里勇敢的,令人爱戴和尊敬的,为人民造福的英雄。古代传说里后羿不能登月,只能远望着月亮,遥遥无期地期待着和嫦娥相聚。现在“后羿”“嫦娥”“玉兔”能够在月球上团聚,象征着现代的中国科技逐渐兴旺发达。当然也可在全国征集名字,此本身也是科普活动。
9)写入物理课本当参考。单摆是中学重要的物理模型。在月球的地面上测量月球背面的精确的重力加速度的单摆实验,可以让高中生,大学生参与进来。可以把测量方法和测量结果当成科普知识写入物理课本当参考。不但可得到有实际意义的科学数据,也可增加学生的学习科技兴趣,培养学生创造性思维和发散性思维。具有极佳的科普作用。endprint
10)期待申请吉尼斯纪录。比如:在距地球最远的距离上和地球上的人對话的机器人;第一次到月球上的类人形的可爱的机器人;第一次在地球外星球上举起一个国家国旗的机器人;第一次在地球外星球上向地球上全世界人民问好的机器人;第一次在地球外星球上操作实验的机器人。
11)向国家有关部门申请启用一登月机器人宇航员,机器人宇航员一新汉语名词。申请其英语译文。然后在维基百科,百度百科等里面创建登月机器人宇航员,机器人宇航员词条。
12)通过登月机器人宇航员在月球上挥动小国旗,唱国歌等等进行爱国教育。增强民族自豪感。兼具科普意义和爱国主义教育意义。
5.2科学意义
1)模拟载人登月地球月球间音频传输,获取关于音频的采集,压缩,处理,传输等技术。获取的技术是我国下一步载人登月时一定要用到的基本的,又关键的技术。
2)模拟载人登月地球月球间视频传输,获取关于视频的采集,压缩,处理,传输等技术。获取的技术是我国下一步载人登月时一定要用到的基本的,又关键的技术。
3)使我国获取以下一系列技术,并增加经验。机器人的遥控技术,控制技术,基本服务技术,监视技术,动作规划技术,软件地面可更新技术,讲话与身体动作的协调配合技术,国产CPU和自主嵌入式操作系统在航天探测机器人上的应用技术,航天服的热防护技术,机器人与无生命支持系统宇航服的协调匹配使用技术。
4)人类首次在月面上精确测量月球背面的重力加速度。利用卫星可以在几十公里的上空上测量月球的重力场,但未必把比直接在月面上测量直接精确。得到的测量结果有望发表在《Nature》《Science》等权威论文杂志上。促进科技进步。
5)在“科技创新2030——重大项目”里把大力发展机器人装备作为一项重大创新发展工程。人形机器人里用国产龙芯CPU,国产嵌入式操作系统,国产马达,有助于我国制造业转型升级,创新发展,符合航天高技术带动产业技术发展的航天强国战略,符合创新驱动发展战略,《中国制造2025》制造强国战略。
6)验证后得到的技术拓展性强,能很好地衔接下一步的研究和探测的技术。有技术的连续性和继承性。为下一步研究更加复杂,更加智能的机器人宇航员打下坚实的基础。验证的关于音频处理,视频处理技术是我国下一步载人登月时一定要用到的基本的,又关键的技术。
7)验证的机器人的遥控技术,控制技术,基本服务技术,监视技术,动作规划技术,软件地面可更新技术,讲话与身体动作的协调配合技术,国产CPU和自主嵌入式操作系统在航天探测机器人上的应用技术,航天服的热防护技术,机器人与无生命系统宇航服的协调匹配使用技术,为我国下一步利用机器人进行月球探测,月球基地建设,火星探测等等打下坚实的技术基础。
下一步的研究建议:(1)研究开发:机器人宇航员(人形机器人);可驾驶月球车;地面遥控系统,数据手套,多灵巧手;耐极温,耐辐射,耐冲撞的无生命系统的机器人宇航员用航天服;模拟仿真软件。(2)验证技术:机器人宇航员(人形机器人)在月面上的工具操作和步行技术;可驾驶的月球车的技术;人形机器人驾驶月球车的技术;从地球遥控人形机器人进行工作操作,进行驾驶月球车的技术;人形机器人,月球车的电脑模拟仿真技术。
8)人形机器人在航天探测等领域有以下意义。本次验证后得到的技术走出了开端,打下了基础。有与人的相似性,工具可通用,工作环境可通用,无需专门为人形机器人打造工具,工作环境;无需氧气,水等生命支持系统,又能完成人类所能进行的众多任务;短期有人照料和长期有人照料的月球基地上尤其重要;加上呼吸等生理系统,可以模拟人,在人类进入月球基地,登上火星前,进行技术验证;可推广应用于空间站,空天飞机、战斗机、深海潜水器、人类日常生活等等。
6结论
笔者提出了一种身高40cm以下,具有18个自由度的,3kg以下的可爱的小型人形机器人,穿上无生命保障系统的简易航天服,进行动作演示和技术验证的方案。并具体提出了演示目标,要验证的技术,探测方案,也具体分析了科普意义,科学意义。该方案也可认为是利用人形机器人宇航员替代真人宇航员进行一些载人登月预演,加上验证人形机器人本身的技术。另外还探测重力加速度。该方案有目标创新性、技术继承性、工程可实现性,兼具科普意义、科学意义、爱国主义教育意义和经济意义,各项意义重大。endprint
