机器人与自动化技术探析
2017-09-29唐怀滨
唐怀滨
摘要 当前社会经济与科学技术不断进步,自动化技术在机械制造领域内也发挥着重要的作用。此种情况下相对廉价的人力操作模式逐渐被淘汰,取而代之的是机器人自动化技术的发展。本文就机器人与自动化技术进行简要分析,以推进机械制造行业的发展进步,进而拉动国民经济的稳定持续发展。
关键词 机器人;自动化技术;控制系统
中图分类号 TP24 文献标识码 A 文章编号 2095—6363(2016)12—0001—02
机器人与自动化技术在工业生产与机械制造领域内的发展应用,一定程度上提高了生产效率和生产水平,机器人工业时代逐渐到来,推进整个社会生产的跨越式发展。为确保机器人与自动化技术在工业生产领域内的实际应用价值得以有效发挥,应当准确把握机器人系统内部组成以及自动化技术应用方式,从而确保安全高效地运用机器人开展自动化生产操作。
1机器人技术概述
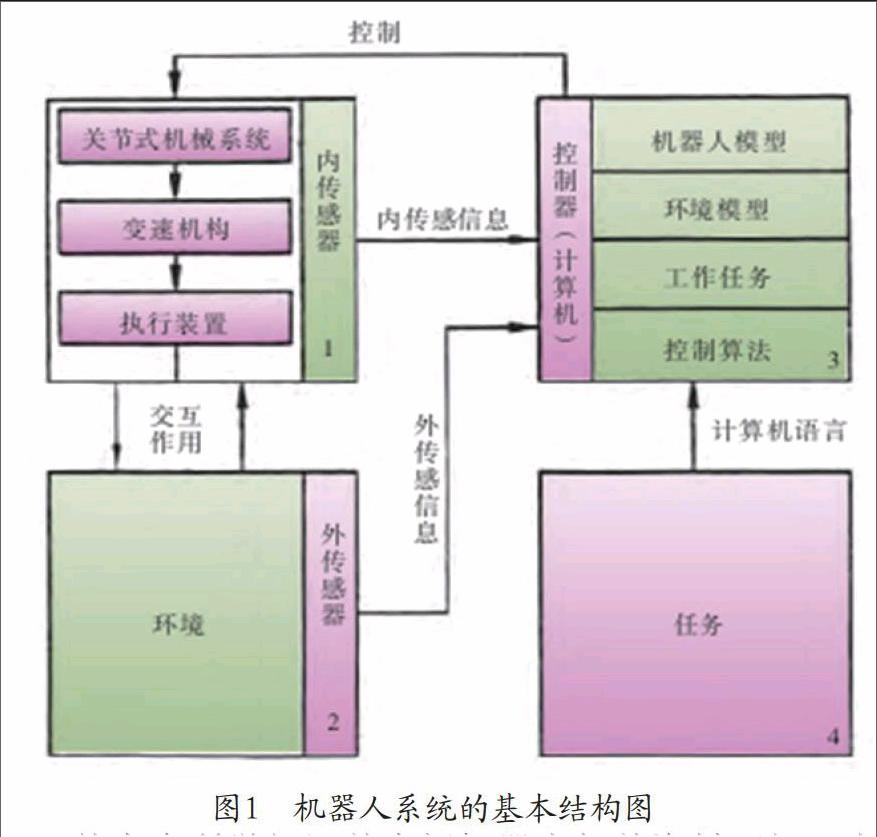
机器人技术具有一定复杂性和特殊性,通过将机械技术、电子技术、自动化技术以及通信技术等进行有机协调,模仿人类与动物行为,推进生产与社会实践的顺利进行。机器人主要由计算机系统、能源系统、可移动的身体结构和肌肉系统、感官传感系统等组成,以确保机器人各项动作的顺利完成,满足机器人的使用需求。机器人系统基本结构图如图1所示,其组成部分主要包括执行器、控制器、环境以及任务,并且以实际承载能力、动作形态、作业空间以及位置精度等作为工业机器人的技术指标。
就自身所学知识并查阅机器人相关资料可知,当前国际上并未制定统一化的机器人分类标准,在类型上主要有2类,一是工业机器人,二是服务机器人。也可以按照市场需求将机器人分为一般机器人和拟人机器人,或一般机器人和智能机器人等。通常所提到的智能机器人是具有感觉识别能力且能够控制自身行为的一种机器人,具有良好的动作能力和协同能力,能够满足现代社会多元化的机器人应用需求。
就工业机器人来看,在工业生产与机械制造过程中大多应用机器人来实现抓取、搬运、包装以及装配机焊接等操作,在实际生产应用中发挥着重要的作用。与数控机床或加工中心相比,工业机器人并未处于中心地位,但其对于整个生产操作环节来说是必不可少的。随着现代科学技术的不断进步,通用机器人的应用能力不断提升,性价比趋于合理,若技术人员在机器人的末端接入操作器或辅助设备,并在系统内部编写相应程序,能够对机器人实现科学化控制,则机器人具备多种功能,无需按照以往分类方式对机器人进行分类选用,实现机器人的多功能化发展,在未来技术发展形势下,这也将是机器人未来发展的重要趋势。
2机器人自动化控制系统
基于高三阶段对机器人自动化技术的所学,并通过对图1进行观察和分析,可以准确把握机器人控制系统的基本组成部分,包括本体执行器内的伺服系统以及本体内外的控制器相关部分,由硬件与软件协调组成,以下开展具体分析。
2.1交流伺服系统
在机器人运行过程中,其至少具备6个自由度,方可满足自动化生产的工作需求,其中包括位置自由度和姿态自由度。机器人的手臂决定着机器人所能到达的位置,而机器人的手腕决定机器人的姿态形式,通过各种交流伺服电机的协调运作,方可实现对机器人的运动控制。机器人的伺服电动机转速较高,需要将减速装置与机械结构妥善相联,形成一个优化的伺服机构,方可保证机器人的正常工作。当前机器人交流伺服系统主要由位置环、速度环以及电流环系统组成,通过PI比例积分的优化调节,促进无差调节的顺利实现,最大程度上满足社会群体对机器人运作的实际需求。就永磁电动机方面来看,当前比较常用的是无刷电动机和交流同步电动机,在实际应用过程中,通过磁场、转矩等的协调配合,基于反馈保证停车的可控性。
2.2控制器
机器人自动化系统大多以工程机IPC作为控制器,并以32位中央处理器作为主CPU,以内置PLC就地开展各项工作,从而满足多元化的应用需求。随着现代科学技术的不断进步,嵌入式PC、PAC以及CAN等自动化技术在机器人系统中也逐渐得到广泛应用。就控制層次来看,伺服系统级属于基础层面上的级别,再向上是依靠动态模型以及几何模型的控制模式级和依靠策略模型的人工智能级,也就是说,整个机器人自动化技术的发展是一个循序渐进的过程,是对现代科学技术不断创新应用后得以发展形成的。
2.3机器人高级控制
高级控制在机器人领域内具有良好的应用价值,通过自适应控制以及智能控制的实现,能够准确把握机器人运作模型参数,促进线性摄动自适应控制和自校正自适应控制的实现。而智能化控制是基于先进科学技术水平上得以形成的,主要包括进化控制、神经控制、模糊控制以及专家控制等,实现了人工智能与自动控制交接的有机协调,一定程度上完善了机器人自动化功能,在多指灵巧手的神经控制上具有良好的应用价值,在工业生产领域内占据着重要的地位。在未来一段时期内,将逐渐向机器人高层规划以及机器人轨迹规划等方面发展。
3机器人传感器
机器人传感器有内外传感器之分,在通常情况下,我们将安装于机器人机械手臂上的传感器称为内传感器,将安装于环境部分的传感器成为外传感器,以下进行具体分析。
3.1内传感器
为保证机器人的正常运作,内传感器大多安装于机器人的手臂或手腕处,以便准确开展位置及速度测量,促进伺服控制的实现,除此之外,电机与周机械部件等也作为内传感器安装于机器人的手臂或手腕处。
就位置传感器来看,直线移动传感器主要有电位计式传感器和可调式变压器2种,而角位移传感器主要包括可调变压器以及旋转变压器等。增量式编码器在机器人自动化技术中能够实现零位不确定的位置伺服控制,确保机器人设备在压力作用下能够获取编码器初始锁定位置的驱动轴瞬时角度值,进一步准确获取编码器读书,调整定值进而保证机器人的安全稳定运行,满足工业生产的综合需求。
机器人的自动化运行离不开速度和加速传感器,其通过测量平移和旋转运动完成机器人的各项运作,从而保证机器人的测量旋转速度,提高机器人运作的精准度。伸缩测量仪也是应力传感器的一种,能够实现加速测量,进而对工业机器人进行动态化控制,全面提高机器人自动化生产效率。力觉传感器主要用于测量物体之间作用力,常用类型有金属电阻型力觉传感器、半导体型力觉传感器等。
3.2外传感器
外传感器是机器人的重要组成部分,在智能机器人以及移动机器人实际应用中,外传感器促进了自校正能力和反应环境变化能力的实现,丰富了机器人的使用功能。
触觉传感器是外传感器中的重要组成部分,以微型开关为常用型式,除此之外,隔离式双态接触传感器和矩阵传感器等也得到广泛应用。机器人自动化运作过程中,其运动速度是影响物体装卸的一项重要因素,因此应当充分做好机器人运作轨迹规划工作,合理设置接近度传感器,运用遥感技术,准确接收发送器和接收器的信号,最大程度上减少由于机器人运动速度不稳定而对物体装卸造成的损坏,切实保证机器人运作效率,为工业生产提供可靠的服务。
4结论
总而言之,机器人的发展是一个循序渐进的过程,是基于现代科学技术不断创新发展的过程,通过在线分析仪表技术以及多传感器融合技术的科学化应用,逐步提升了机器人的自动化水平,其功能更加丰富,实际应用的便捷性和灵活程度更高,满足了社会多元化的发展需求,受到工业生产领域相关人士的广泛关注,未来有着广阔的发展空间。endprint
