自行高炮发射安全区射击安全控制方法研究
2017-09-29徐建锋李永锋郑百源
徐建锋,彭 浩,李永锋,刘 芳, 郑百源
(1.西北机电工程研究所,陕西 咸阳 712099;2.中国人民解放军75134部队,广西 崇左 532200)
自行高炮发射安全区射击安全控制方法研究
徐建锋1,彭 浩2,李永锋1,刘 芳1, 郑百源2
(1.西北机电工程研究所,陕西 咸阳712099;2.中国人民解放军75134部队,广西 崇左532200)
针对自行高炮在实弹演习、遂行防空、阵地防空等情况下,实现对特定方位禁止/允许火炮射击的自动、可靠控制,保证该区域人员、物资或保卫目标的安全,提出火炮发射安全区射击安全控制方法,即基于综合控制软件实现发射安全区快速设置,以及实时检测自行高炮炮塔方位角和航向角并判断自行高炮炮管绝对方位值是否超出预设发射安全区范围,根据判断结果驱动连锁控制电路实现非发射安全区自动禁止射击功能,从而提高了自行高炮系统使用安全性。
射击安全;发射安全区;射界设置;实时检测;自动禁止射击
自行高炮[1]通常具有方位无限制射击功能,但在实弹演习、伴随防空、阵地防空等情况下,需要对某个方位禁止射击,以保证该方位人员、物资或被保卫目标的安全。目前,为实现上述目的,常采用在底盘装甲上或底盘内加装行程开关等设备来实现,具体做法是通过安装行程开关并将此信号串入安全连锁电路中,当炮塔旋转至某一角度时,通过触发行程开关的方式切断安全连锁电路,达到禁射目的。但由于自行高炮具有高机动性的优点,在自行高炮位置移动或保卫目标移动,需要在不时变换禁射方位的情况下,采用加装行程开关的方式实现方位禁射的功能,这需要不断地调整行程开关的位置,会对使用带来不便,特别是在遂行伴随防空任务的情况下,更是不易采取此类方法实现方位禁射的功能。
笔者提出一种在某现役自行高炮上易于实现的发射安全区射击控制方法,该方法基于综合控制软件实现预设发射安全区设置,并能实时检测自行高炮炮塔方位角和航向角并计算得到炮管指向的绝对方位值,然后判断其是否超出预设发射安全区范围,从而驱动连锁电路实现非发射安全区自动禁止射击功能。
笔者所述发射安全区是指以自行高炮为中心,以打击目标所在方位形成的扇形区域,在该区域内能够对目标进行火力打击,超出该区域射击时将会对非射击目标造成伤害,通过发射安全区射击控制系统实现对发射安全区的射击控制,实现非发射安全区的禁止射击功能。
1 控制系统构成与原理
1.1控制系统构成
笔者提出的火炮发射安全区射击安全控制系统以射界设置软件模块、控制软件模块、控制电路和执行机构组成。射界设置模块和控制软件模块集成至综合信息管理软件中,运行于综合管理计算机。射界设置软件模块主要实现射击安全区域的设置,具有易操作、易更改等特点。控制软件模块主要实现炮管指向的绝对方位值与射击安全区的比较并在适当的时机发出正确的控制指令。控制电路利用自行高炮上原有的备用电路进行适应性改造,对控制指令进行电平转换,从而完成对执行机构的驱动。执行机构为自行高炮上原有安全连锁控制电路。其射击安全控制系统构成如图1所示。

1.2控制原理
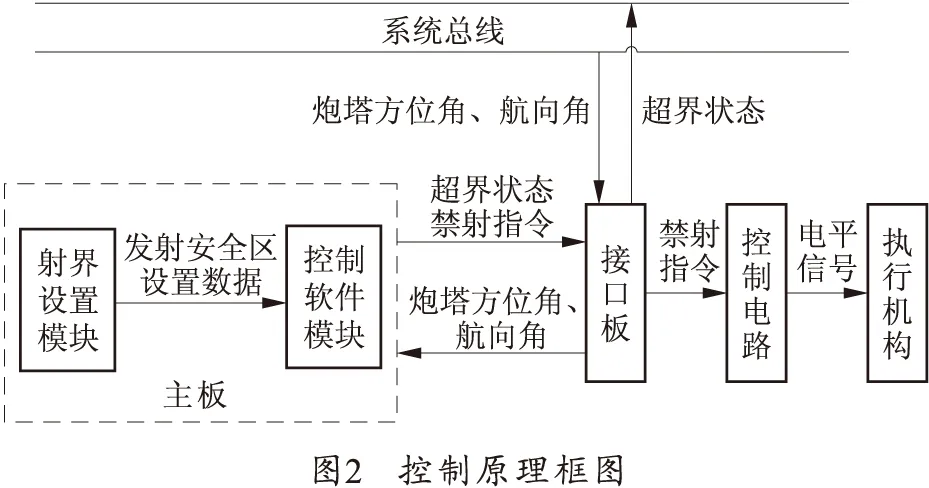
根据实际需要进行发射安全区的设置,控制软件模块从系统总线上实时读取炮塔方位角和航向角并计算得到炮管指向的绝对方位值,然后与预设发射安全区进行比较,根据比较结果发出相应的禁射/非禁射指令。控制电路将禁射指令转换成高低电平信号,经光电隔离和继电器驱动实现对射击连锁电路执行机构的控制。控制原理如图2所示。
2 控制电路设计
控制电路主要完成控制命令转化为高低电平信号驱动执行机构实现对射击连锁电路的可靠控制。选择合适的控制电路关系到系统复杂度和可靠性的高低。
控制电路处理器通过串口接收禁射/非禁射指令,将其转换为高低电平信号后经过锁存器SN54LS373锁存和光电隔离、放大,实现对射击联锁电路执行机构的驱动。
在本设计中,结合自行高炮上电磁环境复杂的实际情况,采用抗干扰能力更好的RS-422串行总线标准实现与综合管理计算机的通信。RS-422是一种单机发送、多机接收的双向、平衡传输总线规范,数据信号采用差分传输方式,具有很强的抗干扰能力[2]。
采用ATMEL公司的AT89S52单片机作为处理芯片并以此为实现禁射信号转换的载体,AT89S52完全兼容MCS-51系列单片机,内部集成有8KB的Flash存储器,是一个低功耗,高性能的51内核的CMOS8位单片机,具有256B的随机存取数据存储器,32个I/O口,2个16位可编程定时计数器[3]。其内部资源丰富、硬件设计简单实用,可靠性高,成本低,能够满足设计要求。
信号隔离采用通用的光耦隔离方式实现。输入的电信号驱动发光二极管,使之发出一定波长的光,被光探测器接收而产生光电流,从而完成电-光-电的两次转换,实现电信号的传送。光耦合器输入/输出间互相隔离,电信号传输具有单向性等特点,具有良好的电绝缘能力和抗干扰能力,保证了信号量的可靠传输。
3 软件设计
软件设计分为射击安全区设置软件模块和射击安全区射击安全控制软件模块两部分,其中射击安全区射击安全控制部分实时性要求高。同时考虑到控制软件需要集成到综合信息管理软件中,进一步提高了对该软件的设计要求。
3.1 设置界面设计
发射安全区设置界面的开发基于VxWorks系统风河多媒体库(WindML)和图形开发工具Tilcon。作为一套微内核、高可靠性、可裁剪的嵌入式实时操作系统,VxWorks具有友好的用户开发环境、高性能内核及良好的持续发展能力,可靠性高,实时性强,已被广泛应用于卫星通信、军事演习、弹道制导和飞机导航等多领域[4-5]。
WindML为VxWorks操作系统提供对基本图形、图像和音频的支持,是开发标准用户设备驱动程序的框架,它为用户提供了进行图形界面开发的应用程序接口[6-7]。
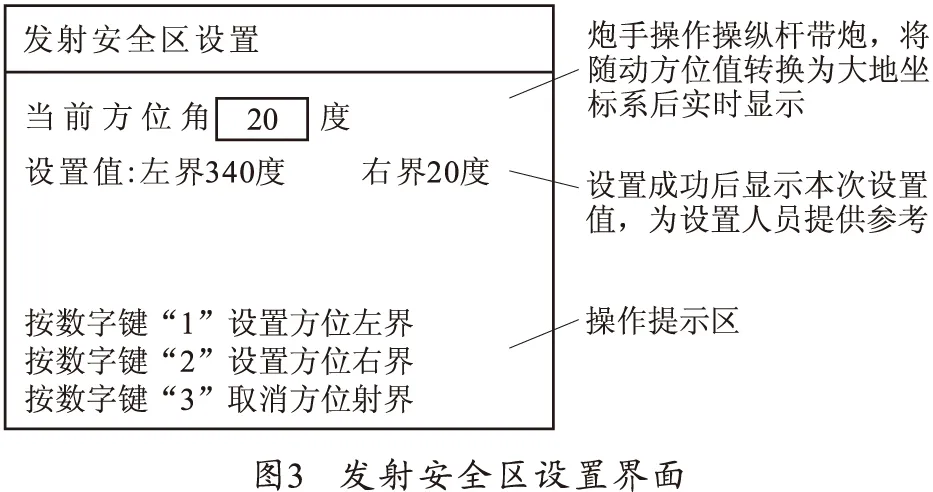
发射安全区设置界面如图3所示,具有射界设置显示和操作提示功能,简单易用。
3.2设置与显示
射击安全区的设置可采用两种方法来实现:一是采用所见即所得的方法,即依据炮塔当前方位角作为射界的左右界;二是采用手动输入的方式设置射击安全区的左右界。笔者倾向使用第1种方法实现,即在系统半自动方式下炮手使用操作杆带炮找到射界所需的方位角,并利用按键操作进行射界的设置,需要确定射界时(可观察射击安全区界面的当前方位显示值)设置射界值,以实现射击安全区的快速设置或取消。
射界设置成功,射击安全区的显示叠加到战斗界面上,便于车长观察。通过Tilcon图形软件生成并在PPI界面采用绿色扇形醒目标识出射界有效范围。射击安全区显示示意图如图4所示。
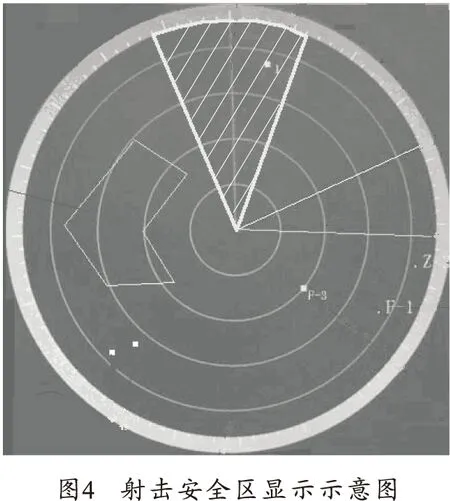
为保证自行高炮在行进时射击安全区的绿色扇形标识(图4中阴影部分)能够始终与预期的射击安全区保持一致,在设计软件时,将航向角与炮塔方位角之和作为当前方位值进行设置,图3中当前方位角和设置值所显示方位均是以自行高炮为中心,北向为起始的绝对方位。当航向角发生变化时,根据当前航向角值与设置发射安全区时的炮塔方位角值重新进行绘图并显示,保证战斗界面上安全区的显示始终与预期值一致。
3.3控制流程
射击安全区的控制判断基于软件实现:通过实时采集系统总线上炮塔方位角与航向角,根据炮塔方位角与航向角的值计算出炮管指向的绝对方位值,判断炮管指向的绝对方位值是否位于预设发射安全区域内,依据判断结果进行射击控制。发射安全区射击控制流程包括以下步骤:
1)设置发射安全区。
2)实时读取炮塔方位角和航向角并计算炮管指向的绝对方位值,在未取消射击安全区的情况下,判断炮管指向的绝对方位值是否在预设发射安全区内。
3)当炮管指向的绝对方位值位于预设发射安全区外时,需要继续判断超界状态量。若超界状态量为0,则实时动态检测模块通过综合管理软件发送“超界”指令,同时将超界状态量置为1;若超界状态量为1,则继续实时读取随动输出的方位角,并判断炮管指向的绝对方位值是否在预设发射安全区内。
4)当炮管指向的绝对方位值位于预设发射安全区内时,仍需要判断超界状态量。若超界状态量为0,则继续实时读取随动输出的方位角,并判断炮管指向的绝对方位值是否在预设发射安全区内;若超界状态量为1,则实时动态检测模块通过综合管理软件发送“未超界”指令,并将超界状态量置为0,同时继续实时读取随动输出的方位角,并判断炮管指向的绝对方位值是否在预设发射安全区内。
5)根据“超界”或“未超界”状态,在预警和战斗状态界面标识“超界”或“未超界”状态,同时通过串口发出禁射/非禁射指令到控制电路完成相应控制。
4 特点与可靠性影响
4.1控制系统特点
可以实现对射击安全区的快速、便捷调整,提高使用效率。
通过对炮管指向的绝对方位值与预设射击安全区进行比较,根据比较结果驱动安全连锁电路以实现禁射/非禁射功能,从而保证火力打击时的射击安全。
4.2对射击安全控制可靠性的影响
发射安全区射击安全控制系统硬件电路设计采取成熟技术,使用简单控制芯片和信号隔离,提高硬件设计的可靠性。
自行高炮具有安全连锁控制功能,舱门开启时不能进行火力打击,保证射击的安全。发射安全区射击安全控制系统硬件控制电路串联进原有的安全控制连锁电路中。在这种情况下,舱门开启或发射安全区射击安全控制系统处于禁射状态时,均不能进行火力打击,进一步提高了火炮射击时的安全性。
5 结束语
发射安全区射击控制实现方法是预设发射安全区,通过软件实时检测并判断炮管指向的绝对方位值是否超出预设发射安全区,根据判断结果发送“超界”或“未超界”指令和状态,并驱动射击连锁电路以实现禁射/非禁射功能。该射击控制方法的实施,能够进一步提高自行高炮的安全系数,特别是在复杂环境下,为快速设定发射安全区或变更发射安全区,以及可靠的射击安全控制提供了解决方案。
References)
[1] 李魁武.现代自行高炮武器系统总体技术[M]. 北京: 国防工业出版社,2012. LI Kuiwu.Modern antiaircraft weapons system overall technical[M]. Beijing: National Defense Industry Press,2012. ( in Chinese)
[2] 衡燕,黄勇.FPGA实现RS-422通信的一种改进方法[J].制导与引信,2012,33(3):37-40. HENG Yan,HUANG Yong.An improved method to rea-lize RS-422communication by FPGA[J]. Guidance & Fuze,2012,33(3):37-40.(in Chinese)
[3] 赵亚范,刘佳琪,王坤.基于AT89S52单片机的开关电源设计[J].电子测量技术,2012,35(10):77-79. ZHAO Yafan,LIU Jiaqi,WANG Kun.Design of switching power supply based on AT89S52monolithic integrated circuit[J]. Electronic Measurement Technology,2012,35(10):77-79. (in Chinese)
[4] 朱伟,许春雷,孔军. 基于Tilcon 的指控系统多任务人机交互软件设计[J].指挥控制与仿真,2011,33(4):110-112. ZHU Wei,XU Chunlei,KONG Jun.Design of software of command and control system with multitask and man-machine interaction based on Tilcon[J]. Command Control & Simulation,2011,33(4):110-112.(in Chinese)
[5] Wind River System Inc. VxWorks programmer’s guide5.5[M]. Alameda,USA: Wind River Systems Inc,2002:230-250.
[6] 王钤,朱松柏,李博,等.一种基于Tilcon的VxWorks图形界面开发方法[J]. 兵工自动化,2014,33(10):89-91. WANG Qian,ZHU Songbai,LI Bo,et al. A method on designing graphical interfaces of VxWorks based on Tilcon[J]. Ordnance Industry Automation,2014,33(10):89-91. (in Chinese)
[7] 张士福. 基于Tilcon 的VxWorks 界面开发技术[J]. 舰船电子对抗,2011,34(4):25-28. ZHANG Shifu.Development technology of VxWorks gra-phical interfaces based on Tilcon[J].Shipboard Electronic Countermeasure,2011,34(4):25-28. (in Chinese)
TheResearchofShooting’sSafetyControlMethodintheSafetyAreaofSelf-propelledAntiaircraftGunShoots
XU Jianfeng1,PENG Hao2,LI Yongfeng1,LIU Fang1, ZHENG Baiyuan2
(1.Northwest Institute of Mechanical & Electrical Engineering,Xianyang712099,Shaanxi,China;2.Unit75134of PLA,Chongzuo532200,Guangxi,China)
In order to achieve automatic and reliable control of self-propelled antiaircraft gun shooting or no shooting at specific azimuth angle in live-fire drills, immediate air defense and covering air defense, presented is a new method of shooting safety control at firing areas based on quick presetting azimuth shooting range through software. The method can detect whether the azimuth angle of the barbette is out of shooting range in real time to initiate interlock circuit to stop shooting when the azimuth angle of the barbette is out of shooting range, so the safety performance of self-propelled antiaircraft gun is improved through this method.
shooting’s safety;the safety area for shooting;firing zone establish; real-time detection;stop shooting automatically
TJ303.9
: A
:1673-6524(2017)03-0016-04
10.19323/j.issn.1673-6524.2017.03.004
2016-05-26
徐建锋(1983—),男,工程师,主要从事自行高炮控制技术研究。E-mail:jk_0395@163.com
